1.本实用新型涉及机械手,尤其涉及一种自动对中取料机械手。
背景技术:
2.现有的取料装置中,以线盘取料机械手为例,为满足准确取料要求,一般会为机械手配置高精度视觉检测机构,这种应用方式不仅结构复杂,而且成本比较高,由此可见,现有技术中亟需一种结构简单、易于取料、不依赖视觉检测机构的机械手装置。
技术实现要素:
3.本实用新型要解决的技术问题在于,针对现有技术的不足,提供一种结构简单、可自动对正、方便取料的机械手。
4.为解决上述技术问题,本实用新型采用如下技术方案。
5.一种自动对中取料机械手,其包括有支撑架,所述支撑架的顶部中心处固定有竖直设置的气缸,所述支撑架上设有两个对称设置的卡爪,所述卡爪的上端与所述气缸的伸缩杆传动配合,且由所述气缸驱使两个卡爪的下端相互远离或者相互靠近,所述卡爪的下端形成有向外凸出的卡爪台阶,所述卡爪台阶的下端外侧形成有锥状端部。
6.优选地,所述卡爪的上端与所述伸缩杆之间通过连杆机构连接。
7.优选地,所述支撑架的下方设有顶板,所述顶板上开设有用于穿过所述卡爪的开口。
8.优选地,所述支撑架上穿设有竖直滑杆且二者滑动配合,所述竖直滑杆下端与所述顶板固定连接。
9.优选地,所述竖直滑杆上套设有弹簧,所述弹簧夹设于所述支撑架与所述顶板之间。
10.优选地,所述支撑架的底部形成有向下延伸的套筒,所述竖直滑杆穿过所述套筒,所述弹簧的上端插设于所述套筒内。
11.优选地,所述竖直滑杆的上端形成有端帽。
12.优选地,所述支撑架为正方形支撑板,所述支撑架上穿设有四个竖直滑杆,四个竖直滑杆分设于所述支撑架的四个拐角处。
13.优选地,所述支撑架的顶部固定有安装支架。
14.优选地,所述气缸设于所述安装支架的内侧。
15.本实用新型公开的自动对中取料机械手中,在所述支撑架上设有两个可活动的卡爪,并利用所述气缸驱使两个卡爪的下端执行张合运动,取料过程中,机械手臂可带动支撑架运动至线盘上方后下降,因两个卡爪的下端均具有锥状端部,所以只需两个锥状端部与线盘的内孔大致对齐,即可令锥状端部插入所述线盘的内孔中,之后可利用所述气缸驱使两个卡爪的下端分离,借由所述卡爪下端的卡爪台阶与所述线盘卡接配合,此时可以对所述线盘执行提拉动作。相比现有技术而言,本实用新型无需依赖视觉检测机构,因此结构更
加简单,而且能够自动与线盘孔对正、卡合,较好地满足了生产要求。
附图说明
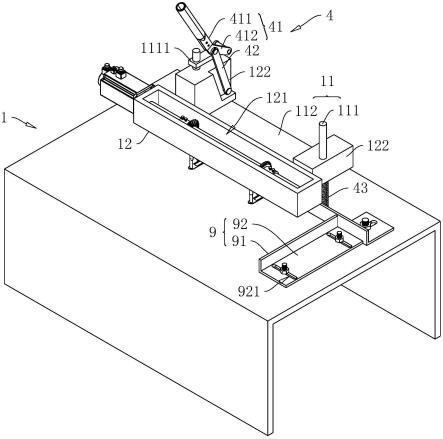
16.图1为本实用新型自动对中取料机械手的侧视图;
17.图2为本实用新型自动对中取料机械手的剖视图;
18.图3为本实用新型自动对中取料机械手的俯视图。
具体实施方式
19.下面结合附图和实施例对本实用新型作更加详细的描述。
20.本实用新型公开了一种自动对中取料机械手,结合图1至图3所示,其包括有支撑架1,所述支撑架1的顶部中心处固定有竖直设置的气缸2,所述支撑架1上设有两个对称设置的卡爪3,所述卡爪3的上端与所述气缸2的伸缩杆20传动配合,且由所述气缸2驱使两个卡爪3的下端相互远离或者相互靠近,所述卡爪3的下端形成有向外凸出的卡爪台阶30,所述卡爪台阶30的下端外侧形成有锥状端部31。
21.上述结构中,在所述支撑架1上设有两个可活动的卡爪3,并利用所述气缸2驱使两个卡爪3的下端执行张合运动,取料过程中,机械手臂可带动支撑架1运动至线盘100上方后下降,因两个卡爪3的下端均具有锥状端部31,所以只需两个锥状端部31与线盘100的内孔大致对齐,即可令锥状端部31插入所述线盘100的内孔中,之后可利用所述气缸2驱使两个卡爪3的下端分离,借由所述卡爪3下端的卡爪台阶30与所述线盘100卡接配合,此时可以对所述线盘100执行提拉动作。相比现有技术而言,本实用新型无需依赖视觉检测机构,因此结构更加简单,而且能够自动与线盘孔对正、卡合,较好地满足了生产要求。
22.作为一种优选方式,所述卡爪3的上端与所述伸缩杆20之间通过连杆机构32连接。
23.为了进一步与所述线盘100抵接配合,本实施例中,所述支撑架1的下方设有顶板4,所述顶板4上开设有用于穿过所述卡爪3的开口40。
24.在此基础上,所述支撑架1上穿设有竖直滑杆5且二者滑动配合,所述竖直滑杆5下端与所述顶板4固定连接。进一步地,所述竖直滑杆5上套设有弹簧6,所述弹簧6夹设于所述支撑架1与所述顶板4之间。
25.上述结构中,通过所述弹簧6施加的弹力可使得所述顶板4与所述线盘100弹性抵接,从而避免因刚性接触而损坏线盘。
26.为了更好地与弹簧匹配,本实施例中,所述支撑架1的底部形成有向下延伸的套筒7,所述竖直滑杆5穿过所述套筒7,所述弹簧6的上端插设于所述套筒7内。
27.作为一种优选方式,所述竖直滑杆5的上端形成有端帽50。
28.为使得四周弹力均衡,本实施例中,所述支撑架1为正方形支撑板,所述支撑架1上穿设有四个竖直滑杆5,四个竖直滑杆5分设于所述支撑架1的四个拐角处。
29.本实施例中,所述支撑架1的顶部固定有安装支架8。所述安装支架8可用于与机械手臂相连接。进一步地,所述气缸2设于所述安装支架8的内侧。
30.以上所述只是本实用新型较佳的实施例,并不用于限制本实用新型,凡在本实用新型的技术范围内所做的修改、等同替换或者改进等,均应包含在本实用新型所保护的范围内。
技术特征:
1.一种自动对中取料机械手,其特征在于,包括有支撑架(1),所述支撑架(1)的顶部中心处固定有竖直设置的气缸(2),所述支撑架(1)上设有两个对称设置的卡爪(3),所述卡爪(3)的上端与所述气缸(2)的伸缩杆(20)传动配合,且由所述气缸(2)驱使两个卡爪(3)的下端相互远离或者相互靠近,所述卡爪(3)的下端形成有向外凸出的卡爪台阶(30),所述卡爪台阶(30)的下端外侧形成有锥状端部(31)。2.如权利要求1所述的自动对中取料机械手,其特征在于,所述卡爪(3)的上端与所述伸缩杆(20)之间通过连杆机构(32)连接。3.如权利要求1所述的自动对中取料机械手,其特征在于,所述支撑架(1)的下方设有顶板(4),所述顶板(4)上开设有用于穿过所述卡爪(3)的开口(40)。4.如权利要求3所述的自动对中取料机械手,其特征在于,所述支撑架(1)上穿设有竖直滑杆(5)且二者滑动配合,所述竖直滑杆(5)下端与所述顶板(4)固定连接。5.如权利要求4所述的自动对中取料机械手,其特征在于,所述竖直滑杆(5)上套设有弹簧(6),所述弹簧(6)夹设于所述支撑架(1)与所述顶板(4)之间。6.如权利要求5所述的自动对中取料机械手,其特征在于,所述支撑架(1)的底部形成有向下延伸的套筒(7),所述竖直滑杆(5)穿过所述套筒(7),所述弹簧(6)的上端插设于所述套筒(7)内。7.如权利要求6所述的自动对中取料机械手,其特征在于,所述竖直滑杆(5)的上端形成有端帽(50)。8.如权利要求4所述的自动对中取料机械手,其特征在于,所述支撑架(1)为正方形支撑板,所述支撑架(1)上穿设有四个竖直滑杆(5),四个竖直滑杆(5)分设于所述支撑架(1)的四个拐角处。9.如权利要求1所述的自动对中取料机械手,其特征在于,所述支撑架(1)的顶部固定有安装支架(8)。10.如权利要求9所述的自动对中取料机械手,其特征在于,所述气缸(2)设于所述安装支架(8)的内侧。
技术总结
本实用新型公开了一种自动对中取料机械手,其包括有支撑架,所述支撑架的顶部中心处固定有竖直设置的气缸,所述支撑架上设有两个对称设置的卡爪,所述卡爪的上端与所述气缸的伸缩杆传动配合,且由所述气缸驱使两个卡爪的下端相互远离或者相互靠近,所述卡爪的下端形成有向外凸出的卡爪台阶,所述卡爪台阶的下端外侧形成有锥状端部。本实用新型无需依赖视觉检测机构,因此结构更加简单,而且能够自动与线盘孔对正、卡合,较好地满足了生产要求。较好地满足了生产要求。较好地满足了生产要求。
技术研发人员:畅志军
受保护的技术使用者:宁波中科莱恩机器人有限公司
技术研发日:2021.12.19
技术公布日:2022/6/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。