1.本发明属于建筑工业化建筑施工领域,特别涉及一种多维移动自动化外围 护结构施工平台的施工方法。
背景技术:
2.我国建筑业的产业规模不断扩大,科技水平不断提高,建造能力不断增强, 带动了大量关联产业,已成为国民经济的重要支柱产业。现阶段我国建筑业仍 是一个劳动密集型、建造方式相对落后的传统产业。
3.目前,国家正大力推进建筑工业化的相关政策法规,但与之形成极大反差 的是,大部分装配式建筑建造过程中仍然采用传统现浇结构建造的施工技术, 施工方法落后,在进行外墙施工时,仍然采用传统的钢管扣件脚手架进行现场 施工,存在着安全性差,安装较为繁琐,施工效率低等缺陷。因此,针对上述 问题,本发明旨在研究分析目前现有建筑外围护施工操作装备缺陷的基础上, 研发一种多维移动自动化外围护结构施工平台,并确定施工技术方法,提升建 筑施工数字化和工业化水平,推动建筑结构建造技术发展。
技术实现要素:
4.本发明旨在发明一种多维移动自动化外围护结构施工平台的施工方法,解 决目前施工平台结构复杂、安装繁琐、施工效率低、施工范围小的缺陷,提高 外委围护结构施工效率,提升建筑施工数字化和工业化水平。
5.为解决上述技术问题,本发明提供如下技术方案:
6.一种多维移动自动化外围护结构施工平台的施工方法,包括如下步骤:
7.步骤1,将两根平台支撑梁、若干平台支撑杆、竖向移动千斤顶装置、操 作平台、横移驱动电机以及两根横移轨道梁运送至外围护结构待施工的楼层 内,将平台支撑杆的下端设置于本层楼板上,平台支撑杆的上端与对应的平台 支撑梁的连接,所述两根平台支撑梁水平设置且相互平行,每根平台支撑梁的 一部分通过至少两根竖向设置的平台支撑杆支撑于建筑内的本层楼板上,另一 部分经窗洞口水平向外延伸形成悬挑部;
8.步骤2,将竖向移动千斤顶装置设置于所述悬挑部上,将两根横移轨道梁 设置于所述竖向移动千斤顶装置上,所述竖向移动千斤顶装置能够驱动所述两 根横移轨道梁上下移动,两根横移轨道梁水平设置且相互平行,两根横移轨道 梁与所述两根平台支撑梁相垂直;
9.步骤3,将所述操作平台设置于所述两根横移轨道梁上,将横移驱动电机 与操作平台连接,所述横移驱动电机能够驱动操作平台沿着所述两根横移轨道 梁水平移动;
10.步骤4,在操作平台上设置一操作控制单元面板,所述操作控制单元面板 分别与横移驱动电机和竖向移动千斤顶装置通讯连接,所述施工人员通过操作 控制单元面板能够控制横移驱动电机和竖向移动千斤顶装置,实现多维移动自 动化外围护结构施工平台的安装和调试;
11.步骤5,施工人员进入操作平台内部,根据实际施工工况经操作控制单元 面板控制竖向移动千斤顶装置使得操作平台上下移动,控制横移驱动电机使得 操作平台横向移动,以对外围护结构进行施工。
12.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,相 邻的平台支撑杆之间设置相互交叉的第一斜撑,所述第一斜撑的两端与平台支 撑杆通过第二螺栓连接。
13.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述平台支撑梁与窗下部墙体之间设置第二斜撑。
14.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述竖向移动千斤顶装置的数量是两个,每根平台支撑梁与两根横移轨道梁之间 设置一个所述竖向移动千斤顶装置,每个竖向移动千斤顶装置包括交叉设置的 斜杆,所述斜杆的两端分别与横移轨道梁以及平台支撑梁铰接,两个竖向移动 千斤顶装置中至少一个设有千斤顶和千斤顶安装座,所述千斤顶安装座安装于 所述交叉设置的斜杆下部之间,所述千斤顶的固定端安装于所述千斤顶安装座 上,所述千斤顶的伸缩端与其中一根斜杆的上部连接,千斤顶的伸缩能够使得 两个交叉设置的斜杆之间的夹角变化,从而去驱动所述操作平台上下移动。
15.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述千斤顶伸展,使得而两个交叉设置的斜杆之间的夹角变大,使得操作平台上 移。
16.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述千斤顶收缩,使得而两个交叉设置的斜杆之间的夹角变小,使得操作平台下 移。
17.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述平台支撑杆的下端与本层楼板上设置的地锚通过第一螺栓连接。
18.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述操作平台上设置围挡。
19.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述窗下部墙体的外侧设置一托板,所述托板上设置一耳板,所述第二斜撑的下 端与所述耳板螺栓连接,所述第二斜撑的上端与悬挑部螺栓连接。
20.由以上公开的技术方案可知,与现有技术相比,本发明的有益效果如下:
21.本发明提供的一种多维移动自动化外围护结构施工平台的施工方法,通过 采用将两根平台支撑梁、若干平台支撑杆、竖向移动千斤顶装置、操作平台、 横移驱动电机以及两根横移轨道梁,每根平台支撑梁的一部分通过至少两根竖 向设置的平台支撑杆支撑于建筑内的本层楼板上,另一部分经窗洞口水平向外 延伸形成悬挑部,将竖向移动千斤顶装置设置于所述悬挑部上,将两根横移轨 道梁设置于所述竖向移动千斤顶装置上,将所述操作平台设置于所述两根横移 轨道梁上,将横移驱动电机与操作平台连接,通过控制竖向移动千斤顶装置使 得操作平台上下移动,通过控制横移驱动电机横向移动操作平台,对外围护结 构进行施工,一方面,由于本自动化外围护结构施工平台可任意安装在外围护 结构施工的楼面内,同时本操作平台可以相对于墙体上下移动,也可以相对于 墙体横向移动,形成了二维度移动空间,扩大了施工人员在操作平台的活动范 围,提高了外围护结构施工效率。另一方面,由于本发明所涉及的一种多维移 动自动化外围护结构施工平台部件简
单,易于安装,可任意布置于需要外围护 结构施工的楼面内,避免了目前用传统的钢管扣件脚手架由建筑地平面至下而 上的大面积繁琐施工,具有安装便捷,节省劳动力的优点。
附图说明
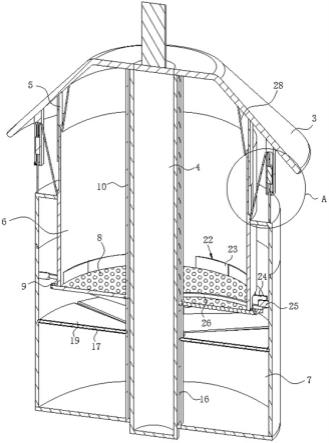
22.图1为多维移动自动化外围护结构施工平台侧立面图;
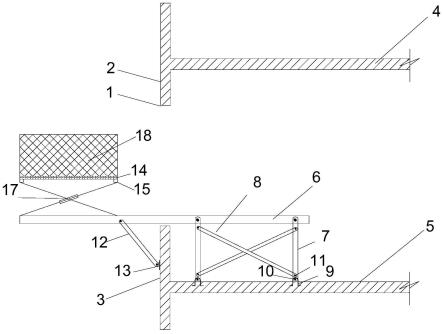
23.图2为多维移动自动化外围护结构施工平台正立面图;
24.图3为多维移动自动化外围护结构施工平台俯视图。
25.图4为竖向移动千斤顶装置的结构示意图。
26.图中标号的具体含义为:1为窗洞口、2为窗上部墙体、3为窗下部墙体、 4为上层楼板、5为本层楼板、6为平台支撑梁、7为平台支撑杆、8为第一斜 撑、9为地锚、10为第一螺栓、11为第二螺栓、12为第二斜撑、13为托板、 14为操作平台、15为横移轨道梁、16为横移驱动电机、17为竖向移动千斤顶 装置、171为斜杆、172为千斤顶、173-为千斤顶安装杆、18为围挡。
具体实施方式
27.以下结合附图和具体实施例对本发明作进一步详细说明。以下将由所列举 之实施例结合附图,详细说明本发明的技术内容及特征。需另外说明的是,附 图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说 明本发明实施例的目的。为叙述方便,下文中所述的“上”、“下”与附图的上、 下的方向一致,但这不能成为本发明技术方案的限制。
28.请参阅图1至图4,本实施例公开了一种多维移动自动化外围护结构施工 平台的施工方法,包括如下步骤:
29.步骤1,将两根平台支撑梁6、若干平台支撑杆7、竖向移动千斤顶装置 17、操作平台14、横移驱动电机16以及两根横移轨道梁15运送至外围护结 构待施工的楼层内,将平台支撑杆7的下端设置于本层楼板5上,平台支撑杆 7的上端与对应的平台支撑梁6的连接,所述两根平台支撑梁6水平设置且相 互平行,每根平台支撑梁6的一部分通过至少两根竖向设置的平台支撑杆7 支撑于建筑内的本层楼板5上,另一部分经窗洞口1水平向外延伸形成悬挑部;
30.步骤2,将竖向移动千斤顶装置17设置于所述悬挑部上,将两根横移轨 道梁15设置于所述竖向移动千斤顶装置17上,所述竖向移动千斤顶装置17 能够驱动所述两根横移轨道梁15上下移动,两根横移轨道梁15水平设置且相 互平行,两根横移轨道梁15与所述两根平台支撑梁6相垂直;
31.步骤3,将所述操作平台14设置于所述两根横移轨道梁15上,将横移驱 动电机16与操作平台14连接,所述横移驱动电机16能够驱动操作平台14 沿着所述两根横移轨道梁15水平移动;
32.步骤4,在操作平台14上设置一操作控制单元面板,所述操作控制单元 面板分别与横移驱动电机16和竖向移动千斤顶装置17通讯连接,所述施工人 员通过操作控制单元面板能够控制横移驱动电机16和竖向移动千斤顶装置 17,实现多维移动自动化外围护结构施工平台的安装和调试;
33.步骤5,施工人员进入操作平台14内部,根据实际施工工况经操作控制 单元面板控制竖向移动千斤顶装置17使得操作平台14上下移动,控制横移驱 动电机16使得操作平台14横向移动,以对外围护结构进行施工。
34.本发明提供的一种多维移动自动化外围护结构施工平台的施工方法,通过 采用将两根平台支撑梁6、若干平台支撑杆7、竖向移动千斤顶装置17、操作 平台14、横移驱动电机16以及两根横移轨道梁15,每根平台支撑梁6的一部 分通过至少两根竖向设置的平台支撑杆7支撑于建筑内的本层楼板5上,另一 部分经窗洞口1水平向外延伸形成悬挑部,将竖向移动千斤顶装置17设置于 所述悬挑部上,将两根横移轨道梁15设置于所述竖向移动千斤顶装置17上, 将所述操作平台14设置于所述两根横移轨道梁15上,将横移驱动电机16与 操作平台14连接,通过控制竖向移动千斤顶装置17使得操作平台14上下移 动,通过控制横移驱动电机16横向移动操作平台14,对外围护结构进行施工, 一方面,由于本自动化外围护结构施工平台可任意安装在外围护结构施工的楼 面内,同时本操作平台14可以相对于墙体上下移动,也可以相对于墙体横向 移动,形成了二维度移动空间,扩大了施工人员在操作平台14的活动范围, 提高了外围护结构施工效率。另一方面,由于本发明所涉及的一种多维移动自 动化外围护结构施工平台部件简单,易于安装,可任意布置于需要外围护结构 施工的楼面内,避免了目前用传统的钢管扣件脚手架由建筑地平面至下而上的 大面积繁琐施工,具有安装便捷,节省劳动力的优点。
35.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,相 邻的平台支撑杆7之间设置相互交叉的第一斜撑8,所述第一斜撑8的两端与 平台支撑杆7通过第二螺栓11连接,从而提高平台支撑杆7的稳定性,进而 提高平台支撑梁6的稳定性,最终提高操作平台14的稳定性和安全性。
36.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述平台支撑梁6与窗下部墙体3之间设置第二斜撑12,从而提高平台支撑梁6 的稳定性,进而提高操作平台14的稳定性和安全性。
37.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述竖向移动千斤顶装置17的数量是两个,每根平台支撑梁6与两根横移轨道 梁15之间设置一个所述竖向移动千斤顶装置17,每个竖向移动千斤顶装置17 包括交叉设置的斜杆171,所述斜杆的两端分别与横移轨道梁15以及平台支 撑梁6铰接,两个竖向移动千斤顶装置17中至少一个设有千斤顶172和千斤 顶安装座173,所述千斤顶安装座安装173于所述交叉设置的斜杆171下部之 间,所述千斤顶172的固定端安装于所述千斤顶安装座173上,所述千斤顶 172的伸缩端与其中一根斜杆的上部连接,千斤顶172的伸缩能够使得两个交 叉设置的斜杆171之间的夹角变化,从而去驱动横移轨道梁15及其上的所述 操作平台14上下移动。上述结构的竖向移动千斤顶装置17,结构简单,安装 方便,能够实现对两根横移轨道梁15及其上操作平台14的稳定支撑和上下移 动,便于施工人员进行外围护结构施工。
38.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述千斤顶伸展,使得而两个交叉设置的斜杆之间的夹角变大,使得操作平台 14上移,便于施工人员进行外围护结构施工。
39.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述千斤顶收缩,使得而两个交叉设置的斜杆之间的夹角变小,使得操作平台 14下移,便于施工人
员进行外围护结构施工。
40.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述平台支撑杆7的下端与本层楼板5上设置的地锚9通过第一螺栓10连接, 从而可以增强平台支撑杆7与本层楼板5之间的连接稳定性,提高平台支撑梁 6的稳定性,进而提高操作平台14的稳定性和安全性。
41.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述操作平台14上设置围挡18,所述围挡18采用封闭式操作围挡。通过设置 围挡18,所述围挡18采用封闭式操作围挡,提高施工人员的安全性,有效保 护施工人员。
42.优选的,在上述的多维移动自动化外围护结构施工平台的施工方法中,所 述窗下部墙体3的外侧设置一托板13,所述托板13上设置一耳板,所述第二 斜撑12的下端与所述耳板螺栓连接,所述第二斜撑12的上端与悬挑部螺栓连 接。通过在所述窗下部墙体3的外侧设置一托板13,所述托板13上设置一耳 板,所述第二斜撑12的下端与所述耳板螺栓连接,可以提高第二斜撑12与窗 下部墙体3的可靠连接,提高第二斜撑12的稳定性,进而提高平台支撑梁6 的稳定性,最终提高操作平台14的稳定性和安全性。
43.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限 定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属 于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。