一种4.2k以下高真空低温原子力显微镜光路系统
技术领域
1.本发明涉及极低温物性测量领域,尤其涉及一种4.2k以下高真空低温原子力显微镜光路系统。
背景技术:
2.现阶段实现低温和高真空条件下表面形貌测试一般只有小体积的扫描隧道显微镜或者是横卧的小体积原子力显微镜。现有的扫描隧道显微镜只能进行表面隧穿电流的探测从而获得样品的表面的形貌,而小体积的卧式原子力显微镜由于样品台设计原因只能实现10k环境下进行测试。通常由于样品台体积原因无法实现多尺度条件下多条件(光,电,磁环境)下样品测试。
3.随着科学技术的不断发展,对材料物性的探测或测试需求越来越强烈,尤其是在小于4.2k以下的极低温环境中的材料物性测量需求越来越多。但目前尚无相应的设备来实现。
技术实现要素:
4.本发明所要解决的技术问题是提供一种使用方便的4.2k以下高真空低温原子力显微镜光路系统。
5.为解决上述问题,本发明所述的一种4.2k以下高真空低温原子力显微镜光路系统,其特征在于:该系统包括光纤激光准直光路系统、两套光学杠杆-激光光路xy移动轴本体、光杠杆结构笼体、四象限探测器;两套所述光学杠杆-激光光路xy移动轴本体上均设有安装孔总,其中一套所述光学杠杆-激光光路xy移动轴本体的安装孔总内插有所述光纤激光准直光路系统,另一套所述光学杠杆-激光光路xy移动轴本体的安装孔总内插有所述四象限探测器;所述光杠杆结构笼体的两侧分别与所述光学杠杆-激光光路xy移动轴本体相连,该光杠杆结构笼体的下部设有探针夹持器,上部设有金属反射镜。
6.所述光纤激光准直光路系统包含fc125um光纤、准直镜和聚焦镜。
7.所述光学杠杆-激光光路xy移动轴本体包括光杠杆移动机构本体、压电转动促动器和xy移动轴内芯;所述光杠杆移动机构本体的中心设有所述xy移动轴内芯,顶部设有安装架,一侧通过螺母与所述光杠杆结构笼体相连,表面通过螺丝连有光杠杆移动模块外壳;所述xy移动轴内芯的中心设有中空轴,该中空轴上分别插有所述光纤激光准直光路系统、所述四象限探测器中的四象限传感器安装柱;所述xy移动轴内芯的一侧表面设有凹槽,该凹槽内设有支撑小球;沿所述xy移动轴内芯的周向设有安装孔ⅰ,该安装孔ⅰ内设有弹簧ⅰ;所述弹簧ⅰ的一端固定在所述光杠杆移动机构本体内;所述安装架的顶部与所述压电转动促动器相连;所述光杠杆移动模块外壳的表面设有安装孔ⅱ,该安装孔ⅱ内固定有滑动限位杆;所述滑动限位杆穿过滑动块安装在所述光杠杆移动机构本体上的安装孔ⅲ中。
8.所述支撑小球与所述滑动限位杆的数量分别为4个。
9.所述支撑小球由固定在凹槽上的弹簧ⅱ及与弹簧ⅱ相连的小球构成。
10.所述光杠杆结构笼体的两侧分别通过螺母与所述光学杠杆-激光光路xy移动轴本体相连。
11.所述光杠杆结构笼体包括侧板、顶板、背板和底板;所述底板的两侧垂直连有所述侧板,后侧垂直连有所述背板,前侧设有燕尾槽,该燕尾槽通过弹簧卡扣与所述探针夹持器相连;所述侧板上设有螺丝孔,并通过螺母与所述光学杠杆-激光光路xy移动轴本体中的光杠杆移动机构本体相连;所述背板上分别设有激光反射镜支架、弹簧支架,该弹簧支架的一端固定在所述底板上;所述激光反射镜支架上通过uhv 胶水粘接有金属反射镜;所述侧板的顶部设有所述顶板,且该侧板与所述光学杠杆-激光光路xy移动轴本体中的光杠杆移动机构本体相连。
12.所述顶板上设有光学观察口。
13.所述侧板上设有安装定位口,该安装定位口与所述光学杠杆-激光光路xy移动轴本体中的光杠杆移动机构本体相连。
14.所述四象限探测器包括四象限传感器和四象限传感器线缆盒;所述四象限传感器线缆盒通过螺丝连接有四象限传感器安装柱,该四象限传感器安装柱与所述四象限传感器相连;所述四象限传感器安装柱与所述光学杠杆-激光光路xy移动轴本体中的xy移动轴内芯相连。
15.本发明与现有技术相比具有以下优点:1、本发明中光杠杆结构笼体的上部设有金属反射镜,没有使用常规的二向色镜、偏振分光系统和四分之一波片等无法在真空和低温中使用的光学元件。
16.2、本发明设有包含fc125um光纤、准直镜和聚焦镜的光纤激光准直光路系统,在使用过程中可以根据需要随时更换不同能量和性质的激光。
17.3、本发明中光学杠杆-激光光路xy移动轴本体,该xy移动机构可以兼容四象限探测器和光纤激光准直光路系统的使用。
18.4、本发明基于1.5k和10-9
pa的环境下使用的原子力显微镜下对全自动光路优化设计,实现了原子力显微镜在真空和低温条件下的便利化使用。
附图说明
19.下面结合附图对本发明的具体实施方式作进一步详细的说明。
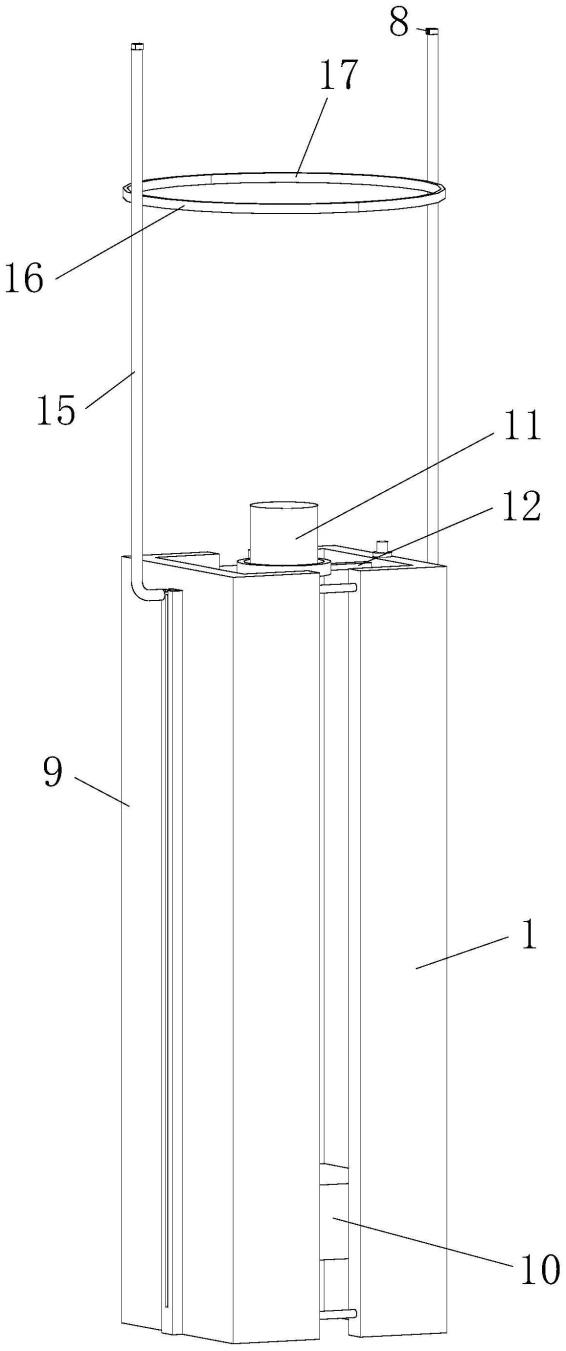
20.图1为本发明的结构示意图。
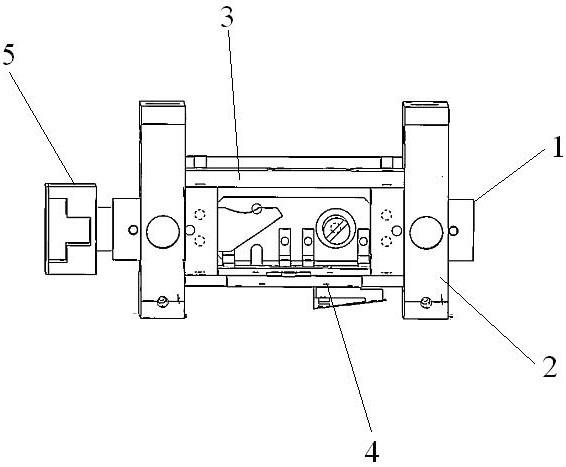
21.图2为本发明中光学杠杆-激光光路xy移动轴本体的示意图。
22.图3为本发明中光杠杆结构笼体的示意图。
23.图4为本发明中所述四象限探测器的示意图。
24.图中:1—光纤激光准直光路系统;2—光学杠杆-激光光路xy移动轴本体;201—支撑小球;202—滑动块;203—光杠杆移动模块外壳;204—弹簧ⅰ;205—滑动限位杆;206—光杠杆移动机构本体;207—安装架;208—压电转动促动器;209—xy移动轴内芯;3—光杠杆结构笼体;301—侧板;302—顶板;303—背板;304—激光反射镜支架;305—弹簧支架;306—底板;4—探针夹持器;5—四象限探测器;501—四象限传感器;502—四象限传感器安装柱;503—四象限传感器线缆盒。
具体实施方式
25.如图1~4所示,一种4.2k以下高真空低温原子力显微镜光路系统,该系统包括光纤激光准直光路系统1、两套光学杠杆-激光光路xy移动轴本体2、光杠杆结构笼体3、四象限探测器5。两套光学杠杆-激光光路xy移动轴本体2上均设有安装孔总,其中一套光学杠杆-激光光路xy移动轴本体2的安装孔总内插有光纤激光准直光路系统1,另一套光学杠杆-激光光路xy移动轴本体2的安装孔总内插有四象限探测器5;光杠杆结构笼体3的两侧分别与光学杠杆-激光光路xy移动轴本体2相连,该光杠杆结构笼体3的下部设有探针夹持器4,上部设有金属反射镜。
26.整个系统构成的简单光学系统,只使用了金属反射镜,没有使用常规的二向色镜、偏振分光系统和四分之一波片等无法在真空和低温中使用的光学元件。
27.其中:光纤激光准直光路系统1包含fc125um光纤、准直镜和聚焦镜,由blue sky research(蓝色天空研究)提供,型号:fdrv635-001sa0。在这个系统将激光光源放在真空系统外,同时使用cf接口保证使用方便。在使用过程中可以根据需要随时更换不同能量和性质的激光。
28.光学杠杆-激光光路xy移动轴本体2包括光杠杆移动机构本体206、压电转动促动器208和xy移动轴内芯209;光杠杆移动机构本体206的中心设有xy移动轴内芯209,顶部设有安装架207,一侧通过螺母与光杠杆结构笼体3相连,表面通过螺丝连有光杠杆移动模块外壳203;xy移动轴内芯209的中心设有中空轴,该中空轴上分别插有光纤激光准直光路系统1、四象限探测器5中的四象限传感器安装柱502;xy移动轴内芯209的一侧表面设有凹槽,该凹槽内设有支撑小球201;沿xy移动轴内芯209的周向设有安装孔ⅰ,该安装孔ⅰ内设有弹簧ⅰ204;弹簧ⅰ204的一端固定在光杠杆移动机构本体206内;安装架207的顶部与压电转动促动器208相连;光杠杆移动模块外壳203的表面设有安装孔ⅱ,该安装孔ⅱ内固定有滑动限位杆205;滑动限位杆205穿过滑动块202安装在光杠杆移动机构本体206上的安装孔ⅲ中。
29.支撑小球201与滑动限位杆205的数量分别为4个。
30.支撑小球201由固定在凹槽上的弹簧ⅱ及与弹簧ⅱ相连的小球构成。
31.光杠杆结构笼体3的两侧分别通过螺母与光学杠杆-激光光路xy移动轴本体2相连。
32.支撑小球201、滑动块202、光杠杆移动模块外壳203、弹簧ⅰ204、滑动限位杆205、光杠杆移动机构本体206、安装架207、压电转动促动器208、xy移动轴内芯209组成的通用型xy移动机构可以兼容四象限探测器5和光纤激光准直光路系统1的使用。同时使用压电转动促动器208可以全自动简易的调节光学系统。
33.光杠杆结构笼体3包括侧板301、顶板302、背板303和底板306;底板306的两侧垂直连有侧板301,后侧垂直连有背板303,前侧设有燕尾槽,该燕尾槽通过弹簧卡扣与探针夹持器4相连;侧板301上设有螺丝孔,并通过螺母与光学杠杆-激光光路xy移动轴本体2中的光杠杆移动机构本体206相连;背板303上分别设有激光反射镜支架304、弹簧支架305,该弹簧支架305的一端固定在底板306上;激光反射镜支架304上通过uhv 胶水粘接有金属反射镜;侧板301的顶部设有顶板302,且该侧板301与光学杠杆-激光光路xy移动轴本体2中的光杠杆移动机构本体206相连。
34.顶板302上设有光学观察口。侧板301上设有安装定位口,该安装定位口与光学杠杆-激光光路xy移动轴本体2中的光杠杆移动机构本体206相连。
35.四象限探测器5包括四象限传感器501和四象限传感器线缆盒503;四象限传感器线缆盒503通过螺丝连接有四象限传感器安装柱502,该四象限传感器安装柱502与四象限传感器501相连;四象限传感器安装柱502与光学杠杆-激光光路xy移动轴本体2中的xy移动轴内芯209相连。
36.探针夹持器4通过弹簧卡扣插入光杠杆结构笼体3下部。
37.压电转动促动器208的生产厂家:newport(理波公司),型号:picomotor。
38.uhv 胶水由安捷伦公司提供,型号:torr seal 。
39.四象限传感器501的生产厂家:first sensor(第一传感器公司),型号:qp50-6。
40.本发明的工作原理:本发明利用一体式的光纤光路和压电转动促动器208结合光学杠杆系统将原子力显微镜的位置信号通过四象限传感器501放大,以获得亚纳米级别位置分辨力。
41.使用时,通过光纤激光准直光路系统1将激光光斑引入光杠杆结构笼体3中,通过压电转动促动器208实现光学系统光路调节对中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。