用于车辆和拖车的振动检测
1.相关申请的交叉引用
2.本技术要求2019年10月18日提交的第62/916,947号美国临时专利申请的优先权和权益,并且该美国临时专利申请以全文引用的方式并入本技术。
技术领域
3.本发明大体上涉及检测车辆和拖车的振动,并且更具体地说,涉及使用表面穿透雷达(spr)系统来检测振动。
背景技术:
4.在车辆后方牵引拖车常常会给车辆和拖车两者带来稳定性问题。拖车在车辆后方被拉动时往往会在横向方向上来回振动或摆动。振动可能由数种情形引起,例如高水平侧风、超速行驶、方向突变等。例如,车辆的操作员可能会转弯,以避开从高速公路匝道强行汇入的另一车辆。快速转弯运动被转移到拖车上,拖车可能会开始振动。如果拖车振动未(例如,通过阻尼或其它缓解措施)得到解决,则振动幅值可能会继续增加;最终,拖车可能会抬起车辆的后端并将车辆从一侧推向另一侧,从而显著增加翻车事故的风险。
5.因此,需要一种方法来检测和解决由牵引负载引起的车辆振动,在理想情况下,这种方法很容易在常规车辆和/或拖车中实施。
技术实现要素:
6.本发明的实施例有助于使用一个或多个spr系统来可靠地检测拖车和/或车辆的振动,所述系统可以轻松地用于拖车和/或车辆上。在各种实施例中,车辆和拖车均配备有spr系统,以在车辆和拖车沿着路线行进时获得spr信号。通过分析在车辆和拖车上获得的spr信号之间的重叠信息,可以快速地检测车辆或拖车的振动和/或拖车与车辆的分离。在一个实施例中,在检测到与车辆/拖车相关联的振动和/或分离后,提供警报以警告驾驶员。替代地,可以提供反馈信号来调整车辆操作(例如,在自主或辅助车辆驾驶期间)。
7.在一些实施例中,可以分析获得的spr信号以独立于振动检测确定车辆/拖车的当前位置以用于导航目的。另外,通过将车辆/拖车的当前位置与(例如,在10秒前获取的)先前位置进行比较,可以检测车辆/拖车中的振动,如下文更详细地描述。在一个实施例中,车辆/拖车的当前位置被定位到位置地图(可以使用spr系统创建,或者可以是从例如谷歌地图(google maps)的另一来源获得的现有地图);然后可以检测车辆/拖车相对于位置地图上标记的车道或小道的偏离。这可有益于在行进路线具有稀疏小道标记的情况下帮助驾驶员导航车辆,和/或在驾驶员喝醉或危险转弯时检测出来。
8.因此,一方面,本发明涉及一种用于检测由一辆或多辆车辆牵引的一辆或多辆拖车的振动的系统。在各种实施例中,所述系统包含:第一spr系统和第二spr系统,配置成分别获取与车辆和拖车相关联的spr信息;以及控制器,配置成基于由第一spr系统和第二spr系统获取的spr信息估计拖车的横向振动程度。另外,控制器可进一步配置成:至少部分地
基于与车辆相关联的获取的spr信息估计与拖车相关联的预期spr信息;将预期spr信息与由拖车上的第二spr系统实际上获取的spr信息进行比较;以及至少部分地基于比较估计横向振动程度。在一个实施方案中,控制器进一步配置成通过根据由车辆上的第一spr系统获取的spr信息进行内插或外插来估计预期spr信息。
9.在各种实施例中,控制器进一步配置成:(a)处理与车辆和拖车相关联的获取的spr信息以便标识车辆和拖车的位置;(b)至少部分地基于车辆的位置估计拖车的位置;以及(c)将在步骤(a)中标识的拖车的位置与在步骤(b)中估计的拖车的位置进行比较,以便估计拖车的横向振动程度。另外,所述系统可进一步包含车辆上用于向车辆的驾驶员发送视觉或音频警报的警报指示器,并且控制器可进一步配置成在拖车的估计横向振动程度超过预定阈值的情况下激活警报指示器。
10.替代地或另外,在确定拖车的横向振动程度超过预定阈值后,控制器可进一步配置成自主地操作车辆的电子装置、机械装置和/或气动装置,以便控制车辆的速度、加速度、定向、角速度和/或角加速度,从而减小拖车的横向振动。在一些实施例中,在确定拖车的横向振动程度超过预定阈值后,控制器进一步配置成自主地调整车辆或拖车的重量分布,以减小拖车的横向振动。
11.另一方面,本发明涉及一种检测由一辆或多辆车辆牵引的一辆或多辆拖车的振动的方法。在各种实施例中,所述方法包含:获取与车辆和拖车相关联的spr信息;以及基于spr信息,估计拖车的横向振动程度。另外,估计拖车的横向振动程度可包含:至少部分地基于与车辆相关联的获取的spr信息估计与拖车相关联的预期spr信息;将预期spr信息与获取的spr信息进行比较;以及至少部分地基于比较估计横向振动程度。在一个实施方案中,通过根据与车辆相关联的获取的spr信息所获取的spr信息进行内插或外插来估计预期spr信息。
12.在各种实施例中,所述方法进一步包含:(a)处理与车辆和拖车相关联的获取的spr信息以便标识车辆和拖车的位置;(b)至少部分地基于车辆的位置估计拖车的位置;以及(c)将在步骤(a)中标识的拖车的位置与在步骤(b)中估计的拖车的位置进行比较,以便估计拖车的横向振动程度。另外,所述方法可进一步包含在确定拖车的横向振动程度超过预定阈值后向驾驶员提供视觉或音频警报。
13.替代地或另外,所述方法可进一步包含在确定拖车的横向振动程度超过预定阈值后,自主地操作车辆的电子装置、机械装置和/或气动装置,以便控制车辆的速度、加速度、定向、角速度和/或角加速度,从而减小拖车的横向振动。在一些实施例中,所述方法进一步包含在确定拖车的横向振动程度超过预定阈值后,自主地调整车辆或拖车的重量分布,以减小拖车的横向振动。
14.本发明的另一方面涉及一种用于检测由车辆牵引的拖车的振动的系统。在各种实施例中,所述系统包含:spr系统,其配置成获取与拖车相关联的spr信息;以及控制器,其配置成基于获取的spr信息估计拖车的横向振动程度。在一个实施方案中,控制器进一步配置成通过将当前获取的spr信息与先前获取的spr信息进行比较来估计拖车的横向振动程度。
15.另外,所述系统可进一步包含车辆上用于向车辆的驾驶员发送视觉或音频警报的警报指示器,并且控制器可进一步配置成在拖车的估计横向振动程度超过预定阈值的情况下激活警报指示器。替代地或另外,在确定拖车的横向振动程度超过预定阈值后,控制器可
进一步配置成自主地操作车辆的电子装置、机械装置和/或气动装置,以便控制车辆的速度、加速度、定向、角速度和/或角加速度,从而减小拖车的横向振动。在一些实施例中,在确定拖车的横向振动程度超过预定阈值后,控制器进一步配置成自主地调整车辆或拖车的重量分布,以减小拖车的横向振动。
16.在又一方面,本发明涉及一种用于检测车辆的转弯的系统。在各种实施例中,所述系统包含:spr系统,其配置成获取与车辆相关联的spr信息;以及控制器,其配置成基于获取的spr信息估计车辆的转弯程度。在一个实施方案中,控制器进一步配置成通过将当前获取的spr信息与先前获取的spr信息进行比较来估计车辆的转弯程度。
17.另外,所述系统可进一步包含车辆上用于向车辆的驾驶员发送视觉或音频警报的警报指示器,并且控制器可进一步配置成在车辆的估计转弯程度超过预定阈值的情况下激活警报指示器。替代地或另外,在确定车辆的转弯程度超过预定阈值后,控制器可进一步配置成自主地操作车辆的电子装置、机械装置和/或气动装置,以便控制车辆的速度、加速度、定向、角速度和/或角加速度,从而减小车辆的转弯。在一些实施例中,在确定车辆的转弯程度超过预定阈值后,控制器进一步配置成自主地调整车辆或拖车的重量分布,以减小车辆的转弯。
18.如本文所使用,术语“大约”和“大体上”意指
±
10%,并且在一些实施例中,意指
±
5%。在整个本说明书中对“一个实例”、“实例”、“一个实施例”或“实施例”的参考意指结合所述实例描述的特定特征、结构或特性包含在本发明技术的至少一个实例中。因此,在整个本说明书中的各个地方出现的短语“在一个实例中”、“在实例中”、“一个实施例”或“实施例”不一定全部指相同实例。此外,特定特征、结构、例程、步骤或特性可在所述技术的一个或多个实例中以任何合适的方式组合。本文提供的标题仅为方便起见,并且不意图限制或解释所要求保护的技术的范围或含义。
附图说明
19.在图式中,相同的参考标号通常在不同视图中始终指代相同的部分。另外,图式不一定按比例绘制,而是通常将重点放在示出本发明的原理上。在以下描述中,参考以下图式描述本发明的各种实施例,在所述图式中:
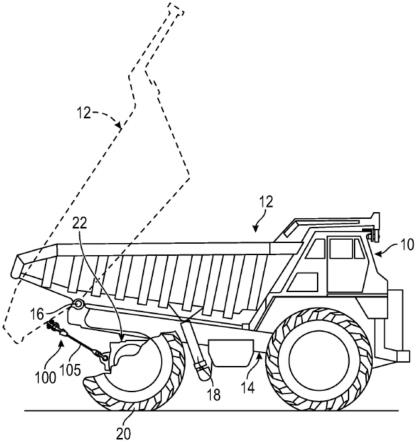
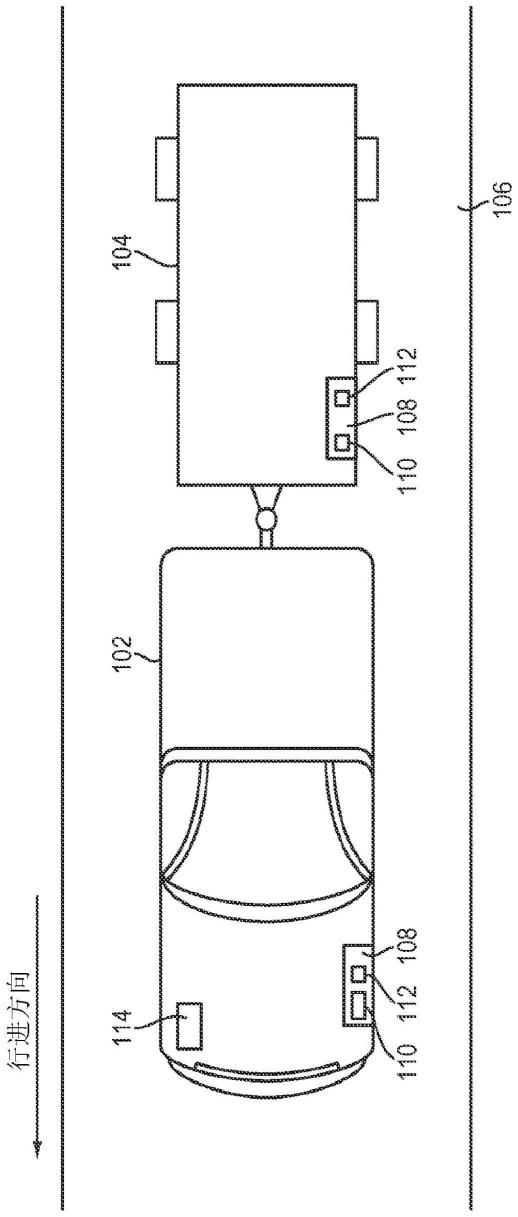
20.图1示意性地示出根据本发明的各种实施例的配备有一个或多个振动检测系统的示例性车辆和拖车。
21.图2示意性地描绘根据本发明的各种实施例的用于检测拖车和/或车辆的振动的示例性方法。
22.图3示意性地描绘根据本发明的各种实施例的用于检测拖车和/或车辆的振动的另一示例性方法。
23.图4为示出根据本发明的各种实施例的用于检测拖车和/或车辆的振动并基于所述振动执行自主或辅助车辆驾驶的示例性方法的流程图。
24.图5示意性地描绘根据本发明的各种实施例的示例性spr系统。
具体实施方式
25.首先参考图1,其示出了在路线106上牵引拖车104的示例性车辆102。车辆102可以
是非自主、半自主(例如,一些常规动力功能由车辆102控制)、辅助或完全自主(例如,动力功能由车辆102控制,而无需直接驾驶员输入)。在各种实施例中,车辆102和/或拖车104具备spr系统108,以根据所述spr系统对车辆102和/或拖车104进行车辆导航和/或振动检测。spr系统108通常包含固定在车辆102和/或拖车104的底部和/或前方(或任何合适部分)的spr天线阵列110。spr天线阵列110通常定向成平行于地表面,并垂直于行进方向延伸。在替代配置中,spr天线阵列110更接近或接触路面。在一个实施例中,spr天线阵列110包含空间不变天线元件的线性配置,用于将spr信号发送到道路;spr信号可以通过路面传播到地下区域,并在向上方向上反射。反射的spr信号可由spr天线阵列110中的接收天线元件检测。在各种实施例中,处理并分析检测到的spr信号以生成沿着车辆102和/或拖车104的轨迹的地下区域的一个或多个spr图像。如果spr天线阵列110不与表面接触,则接收到的最强返回信号可能是由路面引起的反射。因此,spr图像可以包含表面数据,即,地下区域与空气或局部环境的界面的数据。例如,第8,949,024号美国专利(“'024专利”)和第17/066,846号美国专利申请(2020年10月9日提交)中描述了用于处理spr信号的合适spr天线配置和系统,其全部内容在此以引用的方式并入。
26.在一些实施例中,将spr图像与先前针对与路线106的地下区域至少部分重叠的地下区域获取和存储的spr参考图像进行比较。图像比较可以是基于例如相关性的配准过程;参见例如第8,786,485号美国专利和第2013/0050008号美国专利公开案,其全部公开内容以引用的方式并入本文中。可以基于所述比较确定车辆102和拖车104的路线和/或位置。例如,'024专利中描述了利用spr系统进行车辆定位的方法。
27.在一个实施例中,路线和/或位置数据用于创建实时spr地图,所述实时spr地图包含用于对车辆/拖车进行导航的spr信息。例如,基于实时spr地图,可经由控制器112连续地控制车辆102的速度、加速度、定向、角速度和/或角加速度,以便保持车辆102沿着预定义路线的行进。
28.另外或替代地,车辆102和/或拖车104的路线和/或位置数据可与由一个或多个其它传感器或导航系统提供的数据组合使用以引导车辆102和/或拖车104,所述传感器或导航系统例如惯性导航系统(ins)、全球定位系统(gps)、声音导航和测距(sonar)系统、lidar系统、相机、惯性测量单元(imu)和辅助雷达系统、一个或多个车辆航位推算传感器(基于例如转向角和车轮里程计)和/或悬挂传感器)。例如,控制器112可将实时spr信息定位到由gps生成的现有地图。同样,基于现有地图和获得的实时spr信息的组合,可以连续地操作车辆/拖车,以便沿着预定义路线行进。为了便于参考,包含spr信息的实时spr地图以及现有地图和基于路径/位置数据创建的实时spr信息的组合在本文中通常被称为实时spr地图信息。
29.通常,当拖车104跟随车辆102的轨迹行驶而没有明显的振动时,可以通过根据车辆102的获取的实时spr地图信息进行内插或外插来估计与拖车104相关联的spr地图信息。例如,参考图2,假设spr系统108在时间t=t1和t=t2检测到的车辆102的位置分别为d1和d2,并且车辆上的spr系统与拖车之间的距离为d,则可基于距离d以及车辆102的速度(其可基于车辆102在时间间隔δt=t
2-t1期间的行进距离δd=d
2-d1来计算)估计拖车104在时间t=t2的位置。如果在时间t=t2的估计拖车位置与附接在拖车104上的spr系统108在时间t=t2测量的位置明显不同(例如相差10%或在一些实施例中相差20%),则拖车104可能正
经历明显的横向振动。
30.另外或替代地,控制器112可对由车辆104获取的spr图像进行内插或外插以估计与拖车104相关联的spr图像。在一个实施例中,控制器112配置成将由拖车104上的spr系统108实际上获得的spr图像与控制器112使用车辆102上的spr系统估计的拖车spr图像进行比较。如果实际spr图像与估计的spr图像之间存在相当大的相似性(例如,超过预定阈值),则可以假设拖车104未经历明显的振动。然而,如果相似性低于预定阈值,则可发出警报和/或可采取如下文进一步描述的振动校正步骤。
31.在一些实施例中,在逐像素基础上执行图像比较,其中“像素”是指图像数据阵列的元素。合适的相似性度量包含例如互相关系数、平方强度差的和、互信息(如概率论和信息论中使用的术语)、比率图像均匀性(即,对应像素值的比率的归一化标准偏差)、均方误差、绝对差的和、平方误差的和、绝对变换差的和(其使用两个图像中对应像素之间的差的阿达马(hadamard)或其它频率变换)、复互相关,以及本领域的技术人员熟悉的用于实现图像配准的其它技术。
32.在一些实施例中,仅基于拖车104上的spr系统108获取的spr信息检测拖车104的振动。例如,如图3所示,假设从时间t=t1到t=t7,spr信息将拖车104放置在位置d1到d7。此模式表明拖车104在时间t=t4开始振动。类似地,基于车辆102上的spr系统108获取的spr信息,控制器112可确定车辆102是否已偏离其行进的小道或车道。除了振动检测之外,当行进路线上有稀疏的小路标记时,此功能可以帮助驾驶员导航车辆102。另外,此方法可在驾驶员喝醉或危险转弯时检测出来。
33.再次参考图1,在各种实施例中,在检测到车辆/拖车正偏离其行进路径转弯或明显振动时,控制器112向车辆102上的警报指示器114发送信号,所述警报指示器发出视觉和/或听觉警报以警告驾驶员。替代地,控制器112可以自主地执行振动校正步骤,以减轻车辆/拖车的转弯/振动。例如,控制器可以操作车辆102的相关部分(例如,电子装置、机械装置和气动装置),以便调整车辆102的速度、加速度、转向、定向、角速度和/或角加速度,从而减轻转弯/振动。在一些实施例中,控制器112自主地调整车辆或拖车的重量分布以减小拖车的振动。例如,控制器112可以操作附接到与车辆102和/或拖车104相关联的负载的致动器,以通过电子、机械或气动构件改变车辆102和/或拖车104的重心位置。另外或替代地,控制器112可通过电子、机械、气动或陀螺构件(例如,使用飞轮、旋转转子和/或机动框架的装置)施加扭矩来调整车辆102和/或拖车104的角动量。
34.图4示出了根据本文的用于检测车辆102和/或拖车104的振动并基于所述振动执行自主或辅助车辆驾驶的示例性方法400。在第一步骤402中,控制器112激活与车辆102和拖车104相关联的spr系统108以获取与所述车辆和拖车相关联的实时spr地图信息。在第二步骤404中,基于车辆102的spr地图信息,控制器112使用例如内插和/或外插来估计与拖车104相关联的spr地图信息。基于获取的和/或估计的车辆和/或拖车的spr地图信息,控制器112随后可以确定与车辆102相关联的转弯和/或与拖车104相关联的振动的程度(例如幅度)(步骤406)。例如,控制器112可将基于车辆102的spr信息估计的拖车104的spr信息与使用同拖车104相关联的spr系统108实际获取的所述拖车的spr信息进行比较。基于所述比较,控制器112确定拖车的振动程度。在另一实施例中,控制器112将车辆/拖车的当前获取的spr信息与先前获取的spr信息进行比较,以确定与拖车104相关联的振动程度和/或与车
辆102相关联的转弯程度。如果转弯/振动程度超过预定值(例如,幅度大于1米),则控制器112可向警报指示器发送信号,并使警报指示器发出视觉和/或听觉警报以警告驾驶员(步骤408)。另外或替代地,控制器112可自身或在一些实施例中使车辆控制器操作车辆102的相关部分(例如,电子装置、机械装置和气动装置),以调整所述车辆的速度、加速度、转向、定向、角速度和/或角加速度,从而减轻车辆/拖车的转弯/振动(步骤410)。另外或替代地,控制器112可调整车辆和/或拖车的重量分布以减小转弯/振动(步骤412)。在自主或辅助车辆驾驶期间,可以反复地执行步骤402-412。
35.图5描绘根据本发明的在车辆102和/或拖车104中实施的用于检测所述车辆和/或拖车的振动或转弯的示例性spr系统108。spr系统108可包含用户接口502,用户可通过所述用户接口输入数据以限定路线或选择预定义路线。根据所述路线从spr参考图像源504检索spr图像。例如,spr参考图像源504可以是本地大容量存储装置,例如闪存驱动器或硬盘;替代地或另外,spr参考图像源504可以基于云(即,在网络服务器上支持和维持)并且基于由gps确定的当前位置远程存取。例如,本地数据存储装置可含有对应于车辆和/或拖车当前位置附近的spr参考图像,其中在车辆/拖车行进时检索周期性更新以刷新数据。
36.spr系统108还包含具有spr天线阵列110的移动spr系统(“移动系统”)506。移动spr系统506的发送操作由控制器(例如,适当编程的常规处理器)508控制,所述控制器还接收由spr天线阵列110检测到的返回spr信号。控制器508根据例如’024专利生成路面下方的地下区域和/或spr天线阵列110下方的路面的spr图像。
37.spr图像包含表示在地下区域内和/或路面上的结构和物体的特征,例如石块、树根、巨石、管道、空隙和土壤分层,以及指示土壤或土壤和其它地下材料的材料性质(例如,电磁性质)的变化的其它特征。在各种实施例中,配准模块510将由控制器508提供的spr图像与从spr参考图像源504检索的spr图像进行比较,以(例如,通过确定车辆/拖车相对于路线上的最接近点的偏移)定位车辆102和/或拖车104。在各种实施例中,将配准过程中确定的位置信息(例如,偏移数据或位置误差数据)提供到转换模块512,所述转换模块基于获得的spr图像和参考spr图像创建实时地图。例如,转换模块512可生成针对与路线的车辆/拖车位置偏差校正的gps数据。
38.替代地,转换模块512可从地图源514(例如,另一导航系统,例如基于gps的导航系统,或地图绘制服务)检索现有地图,然后将获得的实时spr信息定位到现有地图。在一个实施例中,spr地图信息存储在系统存储器和/或可由控制器508存取的存储装置中的数据库516中。
39.在一些实施例中,控制器508可基于由车辆102和/或拖车104上的spr系统获取的spr信息和/或创建的spr/位置地图,确定车辆/拖车是否偏离其轨迹转弯、在轨迹上明显振动,或与在spr/位置地图上标记的小道偏离。如果是这样,则控制器508可向车辆的警报指示器114发送信号,以提供视觉或音频警报来警告驾驶员。在一些实施例中,控制器508向车辆控制模块518发送信号,所述车辆控制模块联接到控制器508以基于所述信号自主地操作车辆。例如,车辆控制模块518可包含车辆102中的电子装置、机械装置和气动装置或与这些装置协作以调整车辆102的转向、定向、速度、姿势和/或加速/减速,从而减小车辆/拖车的转弯/振动。
40.在一个实施例中,车辆102和拖车104上的spr系统108的控制器508经由车辆102和
拖车104上的通信模块520发送和/或接收与所述车辆和拖车相关联的实时spr地图信息。通信模块520可包含被设计成在其间提供有线和/或无线通信的常规组件(例如,网络接口或收发器)。在一个实施例中,车辆和拖车上的通信模块520彼此直接通信。另外或替代地,通信模块520可经由基础设施彼此间接通信,所述基础设施例如公共电信基础设施、路旁单元、远程编队协调系统、移动通信服务器等。无线通信可借助于具有wifi、蓝牙、红外(ir)通信、电话网络(例如,通用包无线电服务(gprs)、3g、4g、5g、增强型数据gsm环境(edge))或其它非rf通信系统(例如,光学系统等)的无线通信系统来执行。另外,可使用例如am、fm、fsk、psk、ask、qam等任何合适的调制方案来执行无线通信。
41.另外,在车辆和/或拖车中实施的控制器112、508可包含在硬件、软件或这两者的组合中实施的一个或多个模块,并且可以是不同(例如相同)的装置或集成为单个装置。对于将功能提供为一个或多个软件程序的实施例,可以许多高级语言中的任一种来编写程序,所述高级语言例如python、fortran、pascal、java、c、c 、c#、basic、各种脚本处理语言和/或html。另外,软件可用针对驻留在目标计算机上的微处理器的汇编语言来实施;例如,如果软件配置成在ibm pc或pc克隆上运行,那么所述软件可用intel80x86汇编语言来实施。软件可体现在制品上,所述制品包含但不限于软盘、跳转驱动器、硬盘、光盘、磁带、prom、eprom、eeprom、现场可编程门阵列或cd-rom。使用硬件电路系统的实施例可使用例如一个或多个fpga、cpld或asic处理器来实施。
42.本文中所使用的术语和表述用作描述性而非限制性的术语和表述,并且在使用此类术语和表述时不希望排除所示出和描述的特征的任何等效物或其部分。另外,在描述了本发明的某些实施例后,对于本领域的普通技术人员来说将显而易见的是,可在不脱离本发明的精神和范围的情况下使用并入有本文中所公开的概念的其它实施例。因此,所描述的实施例在所有方面都应被视为仅是说明性的而非限制性的。
43.权利要求为:
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。