1.本发明涉及医疗器械领域,具体地,涉及导丝导管输送装置。
背景技术:
2.ercp是一种非常成熟的内镜微创治疗胆胰系统疾病,也叫做经内镜逆行性胰胆管造影术。ercp可用于诊断和治疗胆结石、胆梗阻、胆管炎、胆肿瘤、胰腺肿瘤等疾病。在手术的过程中,将一条十二指肠镜插入患者的十二指肠降部,在活检管道中插入造影导管到十二指肠乳头开口处,接着注入造影剂,在x光线片下观察胰胆管的具体情况,确定是否存在病变,然后进行相应的手术。ercp手术创伤小、手术时间短、并发症少、安全性高等。这种手术属于微创手术,手术创伤非常小,不会给患者带来太多的痛苦,术后恢复也比较快。但是,ercp手术需要在x射线的辅助下完成,手术医生必须长期暴露于x射线下。为了缓解介入手术医生的工作环境,工程上开发了ercp手术机器人代替医生完成手术,医生通过远程操作或遥控操作的方式,在无x射线的环境中控制ercp手术机器人完成手术。目前,市面上尚没有有效的、相近的技术方案。
3.目前,国内的ercp手术都是由医生及其团队手工操作完成,手术时操作人员需要穿戴厚重的防辐射服,且手臂部分需外露操作无法进行防辐射保护,经年累月长期的手术辐射会对操作人员造成严重的辐射伤害。另现有ercp手术需要的操作及协作人员多,在本就空间不大的手术室内略显拥堵,医生及操作人员需成天站立进行手术,工作强度大,容易疲劳,进而影响手术精确性甚至导致出错。手术过程中,医生及操作人员难以保证手不抖动,插入人体器械定位后发生移位的情况时有发生。
4.专利文献cn105664333a公开了一种导丝导管输送装置,包括导丝、导管、导丝输送系统和导管输送系统;导管输送系统包括导管输送导轨,并可沿导管输送导轨的轴向运动,导管固定在导管输送系统上;导丝输送系统包括导丝输送导轨,并可沿导丝输送导轨的轴向运动,导丝固定在导丝输送系统上;导丝输送导轨固定在导管输送导轨上,导丝与导管同轴。
5.专利文献cn110624171a公开了一种导丝导管输送装置,包括导丝移动夹持机构,导丝固定夹持机构,导丝轴向移动机构、导管输送夹持机构和基座,所述基座上沿导丝轴向进给方向分别为所述导丝移动夹持机构,所述导丝固定夹持机构,所述导丝轴向移动机构以及所述导管输送夹持机构。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种导丝导管输送装置。
7.根据本发明提供的一种导丝导管输送装置,包括:导丝导管输送模块和电机驱动及力反馈模块;
8.所述电机驱动及力反馈模块传动连接所述导丝导管输送模块,所述导丝导管输送模块安装并带动导丝导管前后移动;
9.所述电机驱动及力反馈模块内安装力传感器和电机;
10.所述电机输出端连接所述导丝导管输送模块,所述电机背向所述导丝导管输送模块一端连接所述力传感器;
11.所述导丝导管输送模块内安装主动轮和从动轮;
12.所述主动轮连接电机输出端,所述主动轮和所述从动轮之间安装所述导丝导管。
13.优选地,所述电机驱动及力反馈模块还包括:电机支撑架以及支撑轴;
14.所述电机支撑架内安装所述力传感器和所述电机,所述电机输出端延伸出所述电机支撑架一端,所述电机支撑架另一端安装所述力传感器;
15.所述电机支撑架中部向外延伸出所述支撑轴。
16.优选地,所述电机支撑架安装在固定座内;
17.所述电机支撑架通过所述支撑轴转动连接所述固定座;
18.所述固定座固定连接所述力传感器;
19.当所述导丝导管移动,所述电机受所述导丝导管的反作用力,所述电机支撑架靠近所述导丝导管输送模块一端受反作用力,所述电机支撑架连接所述力传感器一端通过所述支撑轴受与反作用力相反的力。
20.优选地,所述导丝导管输送模块还包括:主体、翻盖、从动轮框以及底盖;
21.所述主体底部安装所述底盖,所述主体通过轴销转动连接所述翻盖,所述主体、所述底盖以及所述翻盖合围形成空腔;
22.所述空腔内安装所述从动轮框、所述主动轮以及所述从动轮;
23.所述从动轮框侧面安装所述主动轮,所述从动轮框内部安装所述从动轮;
24.所述从动轮框允许带动所述从动轮相对所述主动轮和所述主体移动;
25.当所述翻盖通过所述轴销背向所述主体转动实现打开,所述导丝导管允许安装在所述主体中;
26.当所述翻盖通过所述轴销朝向所述主体转动实现关闭,所述翻盖限位所述导丝导管移动。
27.优选地,所述从动轮转动连接所述从动轮框,所述从动轮允许相对所述从动轮框朝向所述主动轮方向靠近或远离;
28.所述从动轮框背向所述主动轮一侧安装从动轮顶紧弹珠,所述从动轮和所述从动轮顶紧弹珠之间安装从动轮顶紧弹簧;
29.当所述翻盖关闭,所述从动轮框被所述翻盖按压朝向所述主动轮一侧移动,所述从动轮顶紧弹簧朝所述主动轮方向顶压所述从动轮。
30.优选地,所述从动轮框侧壁安装限位块;
31.当所述从动轮框背向所述主动轮一侧移动,所述限位块与所述主体干涉,所述从动轮框通过所述限位块限制背离所述主动轮距离。
32.优选地,所述主体内壁靠近所述主动轮一侧设置凸台,所述限位块和所述凸台之间安装从动轮松开弹簧;
33.当所述翻盖打开,所述从动轮框通过所述从动轮松开弹簧背向所述主动轮一侧移动。
34.优选地,所述翻盖和所述底盖朝向所述电机驱动及力反馈模块一侧设置卡扣;
35.所述卡扣卡接在所述电机支撑架上。
36.优选地,所述从动轮通过螺丝和螺帽安装在所述从动轮框上;
37.所述从动轮允许绕所述螺丝转动;
38.所述螺丝和所述螺帽允许相对所述主体移动;
39.所述主动轮和所述主体之间安装第一轴承和第二轴承,所述从动轮和所述螺丝之间安装第三轴承。
40.优选地,机器人采用所述导丝导管输送装置。
41.优选地,所述电机输出端设置为d型轴;
42.所述主动轮朝向所述电机一侧设置d型孔;
43.所述d型轴与所述d型孔相适配。
44.优选地,所述卡扣连接按钮并通过按压所述按钮打开。
45.与现有技术相比,本发明具有如下的有益效果:
46.1、本发明可用于介入用手术机器人,避免手术辐射,提高手术安全度,具有实用性;
47.2、本发明实现了导丝导管的输送,稳定性高;
48.3、本装置结构紧凑,节约空间。
附图说明
49.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
50.图1为导丝导管输送装置爆炸图;
51.图2为导丝导管输送装置结构示意图;
52.图3为导丝导管输送装置主视图;
53.图4为导丝导管输送模块结构示意图;
54.图5为导丝导管输送模块剖视图;
55.图6为导丝导管输送装置剖视图;
56.图7为翻盖打开后导丝导管输送模块结构示意图;
57.图8为电机驱动及力反馈模块剖视图;
58.图9为螺丝结构示意图;
59.图10为螺帽结构示意图。
60.图中所示:
[0061][0062]
具体实施方式
[0063]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0064]
实施例1
[0065]
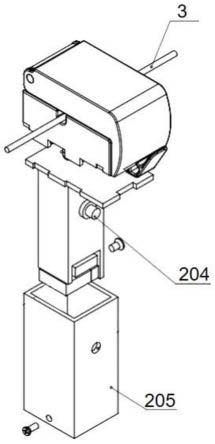
如图1至图3所示,一种导丝导管输送装置,可用于机器人,包括:导丝导管输送模块1和电机驱动及力反馈模块2;电机驱动及力反馈模块2传动连接导丝导管输送模块1,导丝导管输送模块1安装并带动导丝导管3前后移动;电机驱动及力反馈模块2内安装力传感器202和电机203,电机203输出端连接导丝导管输送模块1,电机203背向导丝导管输送模块1一端连接力传感器202,导丝导管输送模块1内安装主动轮103和从动轮104,主动轮103连接电机203输出端,主动轮103和从动轮104之间安装导丝导管3。
[0066]
如图6和图8所示,电机驱动及力反馈模块2还包括:电机支撑架201以及支撑轴204;电机支撑架201内安装力传感器202和电机203,电机203输出端延伸出电机支撑架201一端,电机支撑架201另一端安装力传感器202,电机支撑架201中部向外延伸出支撑轴204。电机支撑架201安装在固定座205内,电机支撑架201通过支撑轴204转动连接固定座205,固定座205固定连接力传感器202;当导丝导管3移动,电机203受导丝导管3的反作用力,电机支撑架201靠近导丝导管输送模块1一端受反作用力,电机支撑架201连接力传感器202一端通过支撑轴204受与反作用力相反的力。
[0067]
如图4和图5所示,导丝导管输送模块1还包括:主体101、翻盖102、从动轮框105以及底盖113;主体101底部安装底盖113,主体101通过轴销转动连接翻盖102,主体101、底盖113以及翻盖102合围形成空腔,空腔内安装从动轮框105、主动轮103以及从动轮104,从动
轮框105侧面安装主动轮103,从动轮框105内部安装从动轮104,从动轮框105允许带动从动轮104相对主动轮103和主体101移动;当翻盖102通过轴销背向主体101转动实现打开,导丝导管3允许安装在主体101中;当翻盖102通过轴销朝向主体101转动实现关闭,翻盖102限位导丝导管3移动。从动轮104转动连接从动轮框105,从动轮104允许相对从动轮框105朝向主动轮103方向靠近或远离;从动轮框105背向主动轮103一侧安装从动轮顶紧弹珠107,从动轮104和从动轮顶紧弹珠107之间安装从动轮顶紧弹簧115,当翻盖102关闭,从动轮框105被翻盖102按压朝向主动轮103一侧移动,从动轮顶紧弹簧115朝主动轮103方向顶压从动轮104。从动轮框105侧壁安装限位块114,当从动轮框105背向主动轮103一侧移动,限位块114与主体101干涉,从动轮框105通过限位块114限制背离主动轮103距离。主体101内壁靠近主动轮103一侧设置凸台,限位块114和凸台之间安装从动轮松开弹簧106;当翻盖102打开,从动轮框105通过从动轮松开弹簧106背向主动轮103一侧移动。
[0068]
如图7、图9和图10所示,翻盖102和底盖113朝向电机驱动及力反馈模块2一侧设置卡扣,卡扣卡接在电机支撑架201上。从动轮104通过螺丝108和螺帽109安装在从动轮框105上,从动轮104允许绕螺丝108转动,螺丝108和螺帽109允许相对主体101移动。主动轮103和主体101之间安装第一轴承110和第二轴承111,从动轮104和螺丝108之间安装第三轴承112。
[0069]
实施例2
[0070]
如图1至图3所示,本实施例包括:导丝导管输送模块1和电机驱动及力反馈模块2;导丝导管输送模块1安装在电机驱动及力反馈模块2上并通过电机驱动及力反馈模块2驱动;导丝导管输送模块1内安装主动轮103和从动轮104,电机驱动及力反馈模块2内安装力传感器202和电机203,电机203输出端传动连接主动轮103。当导丝导管3推动时,主动轮103和从动轮104转动推动导丝导管3移动,导丝导管3会对主动轮103和电机203产生反向作用力,电机支撑架201通过支撑轴204形成杠杆,力传感器202会有与电机203所受力相反的拉力信号产生。
[0071]
如图4和图5所示,导丝导管输送模块1包括:主体101、翻盖102、主动轮103、从动轮104、从动轮框105、从动轮松开弹簧106、从动轮顶紧弹珠107、螺丝108、螺帽109、第一轴承110、第二轴承111、第三轴承112以及底盖13;其中主体101和翻盖102通过轴销连接后,翻盖102可以打开,可以方便放置或移开导丝导管3;主动轮103通过第一轴承110和第二轴承111固定在主体101上,从动轮104通过第三轴承112和螺丝108以及螺帽109固定在从动轮框105上;
[0072]
如图6至图10所示,从动轮松开弹簧106和从动轮顶紧弹珠107固定在从动轮框105上,从动轮框105背向主动轮103一侧安装从动轮顶紧弹珠107,从动轮104和从动轮顶紧弹珠107之间安装从动轮顶紧弹簧115;主体101内壁靠近主动轮103一侧设置凸台,限位块114和凸台之间安装从动轮松开弹簧106,从动轮框105侧壁安装限位块114,当从动轮框105背向主动轮103一侧移动,限位块114与主体101干涉,从动轮框105通过限位块114限制背离主动轮103距离,从动轮松开弹簧106和从动轮顶紧弹簧115可实现从动轮104对导丝导管3的顶紧或松开;底盖113和主体101固定连接。
[0073]
力传感器202和电机203固定在电机支撑架201上;电机支撑架201侧面有两个支撑轴204可以转动安装在固定座205上。导丝导管输送模块1通过卡扣固定在电机驱动及力反
馈模块2上,并可通过按压一边的卡扣松开整个导丝导管输送模块1;翻盖102也可通过卡扣固定在电机驱动及力反馈模块2上,亦可通过按钮松开;电机203的d型轴与主动轮103中的d型孔配合,连接后电机203可驱动主动轮103旋转。翻盖102可随时打开和锁定,可同时用于导丝导管3的定位和装卸;翻盖102盖上时,导丝导管3上下移动被限位,翻盖102打开时,导丝导管3可以从上面放入或取出。翻盖102打开时,内部的从动轮松开弹簧106将从动轮104顶出,导丝导管3得到释放;翻盖102关闭时,外部的从动轮顶紧弹簧115将从动轮104顶紧,从而使得导丝导管3被夹紧,最终电机203可以驱动导丝导管3的推进或回撤操作。从动轮框105和从动轮104通过螺丝108和螺帽109组装后可以在主体101里平移。导丝导管3进退时电机支撑架201有摆动趋势,进而对安装在底部的力传感器202产生一个拉力或压力,底部的力传感器202一端和电机支撑架201连接,另一端和固定座205连接,以保证可以产生拉力或压力。
[0074]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0075]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0076]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。