1.本发明涉及手术机器人领域,具体地,涉及一种手术机器人端部器械及腹腔镜手术机器人。
背景技术:
2.机器人手术系统是集多项现代高科技手段于一体的综合体。应用于心脏外科和前列腺切除术等多个方向。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具。
3.现有采用的钢丝传动方案均是采用旋转驱动钢丝,进而驱动手术器械末端左右钳子的开合、腕部的旋转以及杆部的旋转,cmr外科有限公司采用的是电机加丝杆滑块模组将旋转运动转为直线运动,再通过滑块带动钢丝对手术器械末端左右钳子的开合、腕部的旋转,而杆部则是通过机7自由度机械臂末端进行旋转驱动。
4.综上所述,现有的技术方案可分为两类:1.旋转运动驱动钢丝方案;2.旋转运动转直线运动方案。
5.现行的旋转运动驱动钢丝方案主要是参考直观外科手术操作公司的达芬奇手术机器人的手术器械方案,其采用的张紧线轮上为了给钢丝绕线刻有螺旋形的凹槽,使得电机在驱动钢丝旋转时会朝着固定凹槽进行运动,从而保证钢丝不会出现打结或松弛。但这样的凹槽仍会与钢丝产生滑动摩擦,容易产生细小的金属微颗粒从而增大手术的风险,同时也会降低钢丝的使用寿命;另外,由于螺旋形张紧线轮的一高一低的出线方式,会导致在传动过程中钢丝的有效长度会有发生变化,从而使得钢丝产生轻微的松弛,影响传动的精准性。
6.而cmr外科有限公司虽然采用了旋转运动转直线运动方案,但其方案较为复杂,先是在电机端引入丝杆滑块模组,再在无菌器械端引入直线滑块模组,钢丝与直线滑块模组连接,从而实现对钢丝的直线驱动。
7.专利文献为cn110198681a的发明专利公开了一种线缆长度持恒的医疗器械,包括腕部、末端执行器、线缆对和传动装置。近侧腕部分耦接到轴的远端部分。腕部的致动使远侧腕部分相对于近侧腕部分移动。末端执行器耦接到远侧腕部分,并且能够被致动以相对于腕部移动。传动装置耦接到轴的近端部分,并且能够移动线缆对的一端以致动末端执行器。线缆对的端部被布线通过传动装置内的传动线缆路径。传动装置包括调整机构,该调整机构具有接收由线缆对的端部施加的力的输入部分。调整机构被配置为响应于所述力的改变而改变传动线缆路径的长度。但是上述方案存在传动精确性问题。
8.专利文献为cn111989062a的发明专利公开了一种接口组件,用于将手术机械臂可拆卸地对接到手术器械,该接口组件包括:接口结构,其包括:基座部分,其包括面对手术器械的第一表面和面对手术机械臂的第二表面;和附接到基座部分的后边缘的后部部分,后部部分包括用于将接口结构紧固到手术机械臂的近侧暴露表面的一个或多个紧固件;和可动地安装在后部部分上的锁定元件,该锁定元件能够在锁定位置与解锁位置之间运动,其
中,当锁定元件处于锁定位置时,锁定元件将一个或多个紧固件向内偏置,并且当锁定元件处于解锁位置时,锁定元件不将一个或多个紧固件向内偏置。但是上述方案结构复杂。
9.专利文献为cn111388090a的发明专利公开了一种手术器械、手术器械系统及手术机器人,专利文献为cn112545658a的发明专利公开了一种手术器械、从操作设备及手术机器人,专利文献为cn113349937a的发明专利公开了一种手术机器人的器械驱动传动机构及装配机构,专利文献为cn211131361u的实用新型专利公开了手术机器人器械,上述方案均存在结构复杂,精确性不高的问题。
技术实现要素:
10.针对现有技术中的缺陷,本发明的目的是提供一种手术机器人端部器械及腹腔镜手术机器人。
11.根据本发明提供的一种手术机器人端部器械,包括操作杆,
12.操作杆的一端设置有夹持机构,操作杆的另一端设置有控制模块;
13.所述控制模块包括设置在微型导轨上的,控制夹持机构夹持、腕部弯曲的夹持模块、腕部弯曲模块;夹持模块、腕部弯曲模块在微型导轨上滑动,通过导线连接并驱动夹持机构,控制夹持机构实现夹持、腕部弯曲动作;
14.所述微型导轨设置在导轨固定座上;
15.所述控制模块还包括控制夹持机构旋转的旋转模块。
16.优选地,所述旋转模块包括操作杆输入轴和操作杆张紧轮,其中:
17.操作杆张紧轮通过操作杆钢丝绳连接所述操作杆的线槽轮;
18.操作杆输入轴旋转驱动操作杆张紧轮旋转,进而带动所述线槽轮旋转。
19.优选地,所述导轨固定座的中间设置有通孔,通孔的周向设置有导线轮,夹持模块、腕部弯曲模块的钢丝绳经过导线轮的引导,穿过通孔、操作杆,连接所述夹持机构。
20.优选地,所述夹持机构包括腕部区域、左指和右指,其中:
21.腕部弯曲模块通过腕部钢丝绳连接所述腕部区域,控制腕部区域转动;
22.夹持模块包括左指夹持模块和右指夹持模块,左指夹持模块通过左指钢丝绳连接左指;右指夹持模块通过右指钢丝绳连接右指。
23.优选地,所述夹持模块、腕部弯曲模块均包括主动导轨滑块组和被动导轨滑块组,其中:
24.被动导轨滑块组设置在微型导轨上;
25.主动导轨滑块组带动被动导轨滑块组在微型导轨上运动;
26.所述被动导轨滑块组包括第一被动导轨滑块和第二被动导轨滑块,第一被动导轨滑块和第二被动导轨滑块分别设置在微型导轨的两个导轨上;
27.第一被动导轨滑块和第二被动导轨滑块运动方向相反,运动的速度相同。
28.优选地,所述第一被动导轨滑块和第二被动导轨滑块分别连接第一钢丝绳的一端和第二钢丝绳的一端,第一钢丝绳的另一端和第二钢丝绳的另一端连接夹持机构的同一部件。
29.优选地,所述第一被动导轨滑块和第二被动导轨滑块均设置有张紧螺栓和锁紧螺母,第一钢丝绳的一端和第二钢丝绳的一端被张紧螺栓锁紧螺母张紧在第一被动导轨滑块
和第二被动导轨滑块上。
30.优选地,所述主动导轨滑块组包括第一主动导轨滑块和第二主动导轨滑块,分别与第一被动导轨滑块和第二被动导轨滑块同轴转动连接,第一主动导轨滑块和第二主动导轨滑块之间设置有连接滑块,连接滑块上设置有输入轴,输入轴旋转时带动连接滑块转动,连接滑块带动第一主动导轨滑块和第二主动导轨滑块运动,第一主动导轨滑块和第二主动导轨滑块带动第一被动导轨滑块和第二被动导轨滑块在微型导轨上运动。
31.优选地,所述微型导轨设置有多个,多个微型导轨沿周向分布在导轨固定座上,微型导轨的导轨方向与导轨固定座的径向方向相同。
32.根据本发明提供的一种腹腔镜手术机器人,包括机械臂、执行臂、连接器以及上述的手术机器人端部器械,其中:
33.机械臂与执行臂铰链;
34.执行臂的端部通过连接器连接所述手术机器人端部器械。
35.与现有技术相比,本发明具有如下的有益效果:
36.1、本发明结构简单,操作方便且精确度高。
37.2、本发明杜绝了传统方案中钢丝与螺旋形张紧线轮之间的滑动摩擦,提高了手术的安全性;
38.3、本发明在传动中钢丝有效长度保持恒定不变,避免了传统方案中由于螺旋形张紧线轮的一高一低的出线方式,导致的在传动过程中钢丝的有效长度会发生变化从而使得钢丝产生轻微的松弛而影响传动的精准性,因此提高了手术的可靠性。
39.4、本发明通过微型直线导轨滑块实现旋转运动转直线运动,直接在无菌器械端引入一种旋转运动转直线运动的微型直线导轨滑块装置,一方面简化了在电机端引入丝杆滑块的复杂程度,另一方面杜绝了钢丝与螺旋形张紧线轮之间的滑动摩擦,并且在传动中钢丝有效长度保持恒定不变,大大提高了手术的安全性和可靠性。
附图说明
40.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
41.图1为本发明的腹腔镜手术机器人的系统示意图。
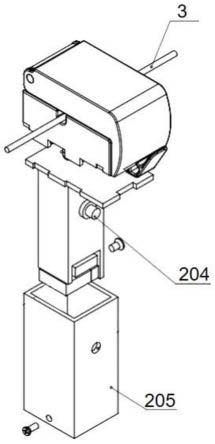
42.图2为本发明的手术机器人端部器械结构示意图。
43.图3-7为本发明的手术机器人端部器械的微型直线导轨滑块的结构示意图。
44.图8和9为本发明的手术机器人的夹持机构的结构示意图。
具体实施方式
45.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
46.如图1至图9所示,根据本发明提供的一种手术机器人端部器械及腹腔镜手术机器人,包括操作杆,操作杆的一端设置有夹持机构,操作杆的另一端设置有控制模块;控制模
块包括设置在微型导轨上的,控制夹持机构夹持、腕部弯曲的夹持模块、腕部弯曲模块;夹持模块、腕部弯曲模块在微型导轨上滑动,通过导线连接并驱动夹持机构,控制夹持机构实现夹持、腕部弯曲动作;微型导轨设置在导轨固定座上;控制模块还包括控制夹持机构旋转的旋转模块。旋转模块包括操作杆输入轴和操作杆张紧轮,其中:操作杆张紧轮通过操作杆钢丝绳连接操作杆的线槽轮;操作杆输入轴旋转驱动操作杆张紧轮旋转,进而带动线槽轮旋转。导轨固定座的中间设置有通孔,通孔的周向设置有导线轮,夹持模块、腕部弯曲模块的钢丝绳经过导线轮的引导,穿过通孔、操作杆,连接夹持机构。夹持机构包括腕部区域、左指和右指,其中:腕部弯曲模块通过腕部钢丝绳连接腕部区域,控制腕部区域转动;夹持模块包括左指夹持模块和右指夹持模块,左指夹持模块通过左指钢丝绳连接左指;右指夹持模块通过右指钢丝绳连接右指。夹持模块、腕部弯曲模块均包括主动导轨滑块组和被动导轨滑块组,其中:被动导轨滑块组设置在微型导轨上;主动导轨滑块组带动被动导轨滑块组在微型导轨上运动;被动导轨滑块组包括第一被动导轨滑块和第二被动导轨滑块,第一被动导轨滑块和第二被动导轨滑块分别设置在微型导轨的两个导轨上;第一被动导轨滑块和第二被动导轨滑块运动方向相反,运动的速度相同。
47.第一被动导轨滑块和第二被动导轨滑块分别连接第一钢丝绳的一端和第二钢丝绳的一端,第一钢丝绳的另一端和第二钢丝绳的另一端连接夹持机构的同一部件。第一被动导轨滑块和第二被动导轨滑块均设置有张紧螺栓和锁紧螺母,第一钢丝绳的一端和第二钢丝绳的一端被张紧螺栓锁紧螺母张紧在第一被动导轨滑块和第二被动导轨滑块上。主动导轨滑块组包括第一主动导轨滑块和第二主动导轨滑块,分别与第一被动导轨滑块和第二被动导轨滑块同轴转动连接,第一主动导轨滑块和第二主动导轨滑块之间设置有连接滑块,连接滑块上设置有输入轴,输入轴旋转时带动连接滑块转动,连接滑块带动第一主动导轨滑块和第二主动导轨滑块运动,第一主动导轨滑块和第二主动导轨滑块带动第一被动导轨滑块和第二被动导轨滑块在微型导轨上运动。
48.微型导轨设置有多个,多个微型导轨沿周向分布在导轨固定座上,微型导轨的导轨方向与导轨固定座的径向方向相同。
49.本发明还提供一种腹腔镜手术机器人,包括机械臂、执行臂、连接器以及上述的手术机器人端部器械,其中:机械臂与执行臂铰链;执行臂的端部通过连接器连接手术机器人端部器械。
50.进一步具体说明,本发明通过四个电机分别带动四组钢丝驱动手术器械末端左右钳子的开合、腕部的旋转以及杆部的旋转,器械末端左右钳子的开合、腕部的旋转是通过一种旋转运动转直线运动的微型直线导轨滑块来实现的钢丝传动,杆部的旋转是通过两个张紧轮来实现钢丝传动,通过对以上四个运动副的控制来实现手术器械的各种临床需求动作,其中旋转运动转直线运动的微型直线导轨滑块实现的钢丝传动将钢丝的磨损降低到最大限度,并且在传动中钢丝有效长度保持恒定不变。
51.本发明主要包括机械臂1、执行臂2、非弹性透明薄膜3、连接器4、器械5、上离合盘6、器械外壳7、操作杆8、右指9、左指10、左指输入轴11、腕部输入轴12、右指输入轴13、操作杆输入轴14、导轨固定座15、微型导轨16、腕部主动导轨滑块组17、腕部被动导轨滑块组18、左指主动导轨滑块组19、左指被动导轨滑块组20、左指被动导轨滑块组21、右指被动导轨滑块组22、操作杆上张紧轮23、操作杆下张紧轮24、操作杆固定座25、操作杆上钢丝绳26a、操
作杆下钢丝绳26b、操作杆线槽轮27、卡扣28、导线轮固定座29、左指钢丝绳30a、左指钢丝绳30b、腕部钢丝绳31a、腕部钢丝绳31b、右指钢丝绳32a、右指钢丝绳32b、右指钢丝绳张紧螺栓33a、右指钢丝绳锁紧螺母33a、右指钢丝绳张紧螺栓33b、右指钢丝绳锁紧螺母33b、腕部钢丝绳张紧螺栓34a、腕部钢丝绳锁紧螺母34a、腕部钢丝绳张紧螺栓34b、腕部钢丝绳锁紧螺母34b、左指钢丝绳张紧螺栓35a、左指钢丝绳锁紧螺母35a、左指钢丝绳张紧螺栓35b、左指钢丝绳锁紧螺母35b、左指被动导轨滑块36a、左指被动导轨滑块36b、左指主动导轨滑块37a、左指主动导轨滑块37b、腕部被动导轨滑块38a、腕部被动导轨滑块38b、腕部主动导轨滑块39a、腕部主动导轨滑块39b、右指被动导轨滑块40a、右指被动导轨滑块40b、右指主动导轨滑块41a、右指主动导轨滑块41b、左指导线轮竖柱42a、左指导线轮竖柱42b、腕部导线轮竖柱43a、腕部导线轮竖柱43b、右指导线轮竖柱44a、右指导线轮竖柱44b、左指导线轮横柱45a、左指导线轮横柱45b、腕部导线轮横柱46a、腕部导线轮横柱46b、右指导线轮横柱47a、右指导线轮横柱47b、左指竖导线轮48a、左指竖导线轮48b、腕部竖导线轮49a、腕部竖导线轮49b、右指竖导线轮50a、右指竖导线轮50b、左指横导线轮51a、左指横导线轮51b、腕部横导线轮52a、腕部横导线轮52b、右指横导线轮53a、右指横导线轮53b、腕部54、操作杆端头55。
52.其中器械5主要包括四个上离合盘6、器械外壳7、操作杆8,右指9,左指10,腕部54、操作杆端头55;器械5内部主要包含导轨固定座15、微型导轨16、操作杆上张紧轮23、操作杆下张紧轮24、操作杆固定座25、操作杆线槽轮27,微型导轨16主要包含腕部主动导轨滑块组17、腕部被动导轨滑块组18、左指主动导轨滑块组19、左指被动导轨滑块组20、左指被动导轨滑块组21、右指被动导轨滑块组22、卡扣28、导线轮固定座29;腕部主动导轨滑块组17包含腕部主动导轨滑块39a、腕部主动导轨滑块39b;腕部被动导轨滑块组18包含腕部被动导轨滑块38a,腕部被动导轨滑块38b;左指主动导轨滑块组19包含左指主动导轨滑块37a,左指主动导轨滑块37b;左指被动导轨滑块组20包含左指被动导轨滑块36a,左指被动导轨滑块36b;左指被动导轨滑块组21包含右指主动导轨滑块41a,右指主动导轨滑块41b;右指被动导轨滑块组22包含右指被动导轨滑块40a,右指被动导轨滑块40b;左指主动导轨滑块37a和左指主动导轨滑块37b被安装在左指输入轴11的导轨上;腕部主动导轨滑块39a和腕部主动导轨滑块39b被安装在腕部输入轴12的导轨上;右指主动导轨滑块41a和右指主动导轨滑块41b被安装在右指输入轴13的导轨上;左指被动导轨滑块36a、左指被动导轨滑块36b、腕部被动导轨滑块38a、腕部被动导轨滑块38b、右指被动导轨滑块40a和右指被动导轨滑块40b均被安装在微型导轨16上;导线轮固定座29通过卡扣28安装在微型导轨16上。
53.左指导线轮竖柱42a、左指导线轮竖柱42b、腕部导线轮竖柱43a、腕部导线轮竖柱43b、右指导线轮竖柱44a、右指导线轮竖柱44b均被固定在导线轮固定座29上;左指导线轮横柱45a、左指导线轮横柱45b、腕部导线轮横柱46a、腕部导线轮横柱46b、右指导线轮横柱47a、右指导线轮横柱47b均被卡扣28限制在导线轮固定座29上;左指竖导线轮48a、左指竖导线轮48b、腕部竖导线轮49a、腕部竖导线轮49b、右指竖导线轮50a、右指竖导线轮50b分别被左指钢丝绳30a、左指钢丝绳30b、腕部钢丝绳31a、腕部钢丝绳31b、右指钢丝绳32a、右指钢丝绳32b预紧在左指导线轮竖柱42a、左指导线轮竖柱42b、腕部导线轮竖柱43a、腕部导线轮竖柱43b、右指导线轮竖柱44a、右指导线轮竖柱44b上;左指横导线轮51a、左指横导线轮51b、腕部横导线轮52a、腕部横导线轮52b、右指横导线轮53a、右指横导线轮53b分别被左指
钢丝绳30a、左指钢丝绳30b、腕部钢丝绳31a、腕部钢丝绳31b、右指钢丝绳32a、右指钢丝绳32b预紧在左指导线轮横柱45a、左指导线轮横柱45b、腕部导线轮横柱46a、腕部导线轮横柱46b、右指导线轮横柱47a、右指导线轮横柱47b上;
54.操作杆上钢丝绳26a和操作杆下钢丝绳26b的一端均固定在操作杆线槽轮27上,另一端分别被操作杆上张紧轮23和操作杆下张紧轮24固定在操作杆输入轴14上;左指钢丝绳30a的一端被左指钢丝绳张紧螺栓35a和左指钢丝绳锁紧螺母35a张紧在左指被动导轨滑块36a上,另一端沿着左指竖导线轮48a和左指横导线轮51a穿过操作杆8,再沿着几个导线轮与左指10连接;左指钢丝绳30b的一端被左指钢丝绳张紧螺栓35b和左指钢丝绳锁紧螺母35b张紧在左指被动导轨滑块36b上,另一端沿着左指竖导线轮48b和左指横导线轮51b穿过操作杆8,再沿着几个导线轮与左指10连接;腕部钢丝绳31a的一端被腕部钢丝绳张紧螺栓34a和腕部钢丝绳锁紧螺母34a张紧在腕部被动导轨滑块38a上,另一端沿着腕部竖导线轮49a和腕部横导线轮52a穿过操作杆8与腕部54连接;腕部钢丝绳31b的一端被腕部钢丝绳张紧螺栓34b和腕部钢丝绳锁紧螺母34b张紧在腕部被动导轨滑块38b上,另一端沿着腕部竖导线轮49b和腕部横导线轮52b穿过操作杆8与腕部54连接;右指钢丝绳32a的一端被右指钢丝绳张紧螺栓33a和右指钢丝绳锁紧螺母33a张紧在右指被动导轨滑块40a上,另一端沿着右指竖导线轮50a和右指横导线轮53a穿过操作杆8,再沿着几个导线轮与右指9连接;右指钢丝绳32b的一端被右指钢丝绳张紧螺栓33b,右指钢丝绳锁紧螺母33b张紧在右指被动导轨滑块40b上,另一端沿着右指竖导线轮50b和右指横导线轮53b穿过操作杆8,再沿着几个导线轮与右指9连接。
55.本发明的工作原理如下:执行臂2中有四个电机,分别驱动四个上离合盘6,上离合盘6分别驱动左指输入轴11、腕部输入轴12、右指输入轴13、操作杆输入轴14旋转;其中左指输入轴11旋转驱动左指主动导轨滑块组19旋转,左指主动导轨滑块组19驱动左指被动导轨滑块组20沿着微型导轨16进行直线运动,其中左指主动导轨滑块组19中的左指主动导轨滑块37a和左指主动导轨滑块37b运动方向相反,左指被动导轨滑块组20中的左指被动导轨滑块36a和左指被动导轨滑块36b运动方向相反,进而由左指被动导轨滑块36a和左指被动导轨滑块36b带动左指钢丝绳30a与左指钢丝绳30b实现方向相反、速度相同的直线运动,从而带动左指10绕着旋转轴a3旋转;右指9绕着旋转轴a3旋转和腕部54绕着旋转轴a2旋转的原理同左指10绕着旋转轴a3旋转;操作杆输入轴14旋转驱动操作杆上张紧轮23和操作杆下张紧轮24一起旋转,从而张紧在操作杆上张紧轮23、操作杆下张紧轮24上的操作杆上钢丝绳26a与操作杆下钢丝绳26b带动操作杆线槽轮27实现旋转。
56.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
57.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。