1.本发明实施例涉及电动工具技术,尤其涉及一种电动工具及电动工具制动方法。
背景技术:
2.对于角磨类工具来说,拥有刹车功能的话,可以缩短重复开机工作的时间间隔,从而大幅提升工具的使用效率。
3.但是角磨类的工具由于磨盘使用法兰紧固,当刹车速度过快时,容易导致磨盘松动,有磨盘脱落的安全风险。同时刹车速度过快时也会引起较大的刹车电流,对电子元件构成挑战。
技术实现要素:
4.本发明实施例提供一种电动工具及电动工具制动方法,通过控制电动工具的制动时间,提高使用安全性,延长电动工具的寿命。
5.第一方面,本发明实施例提供了一种电动工具,包括:
6.电机,包括定子绕组和转子;
7.驱动电路,与所述电机连接,用于向所述电机提供激励信号;
8.控制器,与所述驱动电路连接,用于输出控制信号至所述驱动电路,
9.所述控制器被配置为:
10.在接收到关机信号时,输出第一控制信号,以控制所述驱动电路输出预设强度的激励信号或暂停输出激励信号,使得所述电机降速运行;
11.在所述电机的转速降低至第一转速阈值时,输出第二控制信号,以控制所述驱动电路输出让所述定子绕组短接的激励信号,制动所述电机。
12.可选的,所述驱动电路包括多个电子开关,所述控制器被配置为:
13.在接收到关机信号时,输出使多个所述电子开关按预设顺序导通的第一控制信号,所述第一控制信号具有第一占空比,所述第一占空比小于接收到所述关机信号前所述控制器输出的控制信号的占空比;或者,
14.在接收到关机信号时,输出使所述多个电子开关全部关闭的第一控制信号。
15.可选的,所述多个电子开关包括高侧开关和低侧开关;所述控制器被配置为:
16.在所述电机的转速降低至第一转速阈值时,输出第二控制信号,以控制所述高侧开关或低侧开关导通。
17.可选的,所述第二控制信号为占空比恒定的pwm控制信号,以使得所述高侧开关或所述低侧开关导通时长为固定时长;或者,
18.所述第二控制信号为按照预设占空比增量逐步增加的pwm控制信号,以使得所述高侧开关或所述低侧开关导通时长按照预设增量逐步增加。
19.可选的,当所述第二控制信号为按照预设占空比增量逐步增加的pwm控制信号时,所述pwm控制信号的初始占空比小于或等于30%。
20.可选的,所述控制器还被配置为:
21.若所述第二控制信号为占空比恒定的pwm控制信号,则在输出所述第二控制信号预设时长后,输出所述第一控制信号;
22.在所述电机的转速降低至第二转速阈值时,输出预设时长的所述第二控制信号;
23.基于所述电机的转速与对应转速阈值的比较结果,交替输出所述第一控制信号和所述第二控制信号,直至所述电机停止转动。
24.可选的,还包括:电源模块,用于接入交流电以为所述定子绕组供电;
25.电压转换模块,用于接入所述电源模块接入的交流电并输出直流总线电压。
26.第二方面,本发明实施例还提供了一种电动工具制动方法,应用于本发明任意实施例所述的电动工具,所述方法包括:
27.在接收到关机信号时,输出第一控制信号,以控制所述驱动电路输出预设强度的激励信号或暂停输出激励信号,使得所述电机降速运行;
28.在所述电机的转速降低至第一转速阈值时,输出第二控制信号,以控制所述驱动电路输出让所述定子绕组短接的激励信号,制动所述电机。
29.可选的,所述驱动电路包括多个电子开关;所述输出第一控制信号,以控制所述驱动电路输出预设强度的激励信号或暂停输出激励信号,使得所述电机降速运行,包括:
30.输出使多个所述电子开关按预设顺序导通的第一控制信号,所述第一控制信号具有第一占空比,所述第一占空比小于接收到所述关机信号前所述控制器输出的控制信号的占空比;或者,
31.输出使所述多个电子开关全部关闭的第一控制信号。
32.可选的,所述多个电子开关包括高侧开关和低侧开关;所述输出第二控制信号,以控制所述驱动电路输出让所述定子绕组短接的激励信号,制动所述电机,包括:
33.输出第二控制信号,以控制所述高侧开关或低侧开关导通,以制动所述电机,其中,所述高侧开关导通或所述低侧开关导通的导通时长固定或按照预设增量逐步增加。
34.可选的,在所述输出第二控制信号,以控制所述驱动电路输出让所述定子绕组短接的激励信号之后,所述方法还包括:
35.若所述第二控制信号为占空比恒定的pwm控制信号,则在输出所述第二控制信号预设时长后,输出所述第一控制信号;
36.在所述电机的转速降低至第二转速阈值时,输出预设时长的所述第二控制信号;
37.基于所述电机的转速与对应转速阈值的比较结果,交替输出所述第一控制信号和所述第二控制信号,直至所述电机停止转动。
38.本发明实施例所提供的电动工具,在电动工具关机时,控制器先输出第一控制信号,让电机滑行或减速运行,使得电机的转速下降;在电机的转速降低至第一转速阈值时,控制器输出第二控制信号,使得驱动电路输出让电机的定子绕组短接的激励信号,电机在该激励信号的作用下产生制动力矩,制动电机。通过先让电机的转速下降至一定转速后再进行制动控制,可以避免产生过大的制动力,而避免电机转速下降过快,由此可避免在制动过程中电动工具的功能件松动脱落的风险,提高电动工具的使用安全性。同时,在电机的转速下降至一定转速后,再进行制动控制,可以避免定子绕组产生大的制动电流,从而避免损坏电机中的电子器件,延长了电动工具的寿命。
附图说明
39.图1为本发明实施例提供的一种电动工具的结构框图;
40.图2所示为作为一种实施方式的电动工具的控制系统框图;
41.图3为本发明实施例提供的一种驱动电路的结构示意图;
42.图4为本发明实施例提供的占空比增加的pwm控制信号示意图;
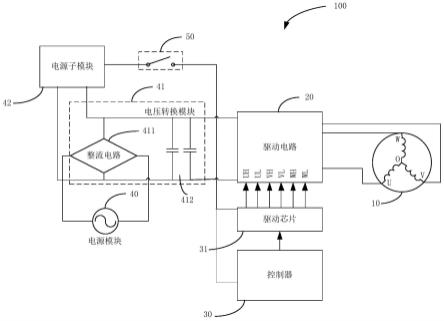
43.图5为本发明实施例提供的另一种电动工具的结构框图;
44.图6为本发明实施例提供的一种电动工具制动方法的流程图。
具体实施方式
45.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
46.图1为本发明实施例提供的一种电动工具的结构示意图,该电动工具不限于角磨、研磨机、螺丝批和砂光机等,利用无刷电机驱动的电动工具均可采用本发明实施例所提供的技术方案。以角磨为例,角磨100包括:
47.护罩101、输出轴102、电机(未示出)、传动机构(未示出)、壳体105、交流电单元106和操作开关107。
48.护罩101至少部分覆盖在打磨盘上以实现防护功能。输出轴102用于安装或固定打磨盘。输出轴102用于连接电机,以通过电机驱动输出轴102转动。具体而言,电机包括电机轴,通过传动机构连接输出轴102和电机轴,将电机轴的驱动力传递至输出轴102。
49.交流电单元106用于接入交流电以为角磨100供电。在一些实施例中,交流电单元106包括交流电插头和与交流电插头电性连接的外围电路。其中,交流电插头插入交流电插座以接入交流市电,从而为电动工具提供电能来源。在另一实施例中,交流电单元106包括其它的能够接入交流电的结构形式及外围电路,例如,交流电插头接入可移动的变电站等方式接入交流电。需要说明的是,交流电单元106只需满足能够接入交流电即可,具体的结构和形式,在此不作限制。其中,交流电单元106能接入的交流电的取值范围为110v~130v或210v~230v。
50.壳体105形成有一个供用户握持的把手部1051和位于把手部前端的头壳部1052。
51.头壳部1052形成有一个能容纳电机和传动机构的头壳空间。把手部1051形成有一个至少容纳电机控制单元的容纳空间。进一步地,把手部前端形成有供用户握持的握持部,大体呈管状。在把手部的后端形成有位于握持部和交流电单元之间的向下延伸的凸部。
52.角磨100还包括操作开关107,用于启动或关闭电机103。当操作开关107触发时电机启动,当操作开关107被释放时电机关闭。操作开关107设置于头壳1052上。
53.图2所示为作为一种实施方式的电动工具的控制系统框图。参考图2,该电动工具还包括电机10、驱动电路20和控制器30。
54.电机10,还包括定子绕组和转子。在一些实施例中,电机10为三相无刷电机,包括具有永磁体的转子和以电子方式换向的三相定子绕组u、v、w。在一些实施例中,三相定子绕组u、v、w之间采用星型连接,在另一些实施例中,三相定子绕组u、v、w之间采用角型连接。然而,必须理解的是其他类型的无刷电动机也在本公开的范围。无刷电动机可包括少于或多
于三相。
55.驱动电路20,与电机10连接,用于向电机10提供激励信号。驱动电路20是用于通过切换对电机10的各相绕组的通电状态、控制各相绕组各自的通电电流来使电机10旋转驱动的电路。各相绕组导通顺序和时间取决于转子的位置。为了使电机10转动,驱动电路20具有多个驱动状态,在一个驱动状态下电机10的定子绕组会产生一个磁场,控制器30基于不同的转子位置输出控制信号以控制驱动电路20切换驱动状态使定子绕组产生的磁场转动以驱动转子转动,进而实现对电机10的驱动。本实施例中,驱动电路20在控制器30输出的控制信号的作用下,用于向电机10的定子绕组输出控制电机10降速运转和制动的激励信号。
56.在一些实施例中,驱动电路20的输入侧连接电动工具100的供电电源经转换后的直流电压信号,驱动电路20的控制端连接控制器30,控制器30通过输出控制信号使得驱动电路20将输入侧的直流电压的功率以一定的逻辑关系分配给电机10定子上的各相绕组,以使电机10启动并产生不断的转矩。
57.控制器30,与驱动电路20连接,用于输出控制信号至驱动电路20。可选的,该电动工具100还包括驱动芯片31,驱动芯片31用于控制驱动电路20中的电子开关的导通或关断状态。驱动芯片31串联在控制器30和驱动电路20之间,根据来自控制器30的控制信号,控制驱动电路20中电子开关导通或关断的状态。在一些实施例中,来自控制器30的控制信号为pwm控制信号。在此实施例中,驱动芯片31被示出为与控制器30分离。在其他实施例中,驱动芯片31和控制器30可以集成为一个整体。
58.本实施例中,控制器30被配置为:
59.在接收到关机信号时,输出第一控制信号,以控制驱动电路20输出预设强度的激励信号或暂停输出激励信号,使得电机10降速运行;
60.在电机10的转速降低至第一转速阈值时,输出第二控制信号,以控制驱动电路20输出让定子绕组短接的激励信号,制动电机10。
61.其中,在电动工具100进行关机时,通常需要将电动尽快制动且要保证电动工具100的安全,考虑到电动工具100在关机前的转速较高,若是进行强行制动,可能会导致电动工具100的功能件松动甚至脱落而引起安全事故。本实施例通过输出不同的制动信号控制电动工具100尽快制动且不会出现安全隐患。
62.具体而言,第一控制信号作用至驱动电路20,使得驱动电路20将输入侧的功率信号按照一定强度输出至电机10的定子绕组,此工况下激励信号的强度小于接收到关机信号前驱动电路20输出的激励信号强度,相当于降低了对于电机10的驱动力,从而电机10的转速下降,电机10降速运行。
63.或者,第一控制信号作用至驱动电路20,使得驱动电路20断开供电电源与电机10的连接,此工况下,驱动电路20暂停向电机10的定子绕组输出激励信号,因此电机10的转子处于滑行状态,电机10的转速相应随之下降,电机10降速运行。
64.电机10的定子绕组短接时,处于发电状态的电机10,相当于电源被短路,因为定子绕组的电阻比较小,所以能产生很大的短路电流,此时,相当于把转子上的动能通过定子电阻泄放,作为热能消耗掉,从而使电机10产生极大的制动力矩,快速制动电机10。电机10速度越高,短路电流越大,制动力也越大。
65.本实施例中,在电机10的转速降低至第一转速阈值时,控制器30输出第二控制信
号以控制电机10的定子绕组短接,对电机10进行制动,这样设置的好处在于,一方面在电机10的转速降低至一定值之后再进行制动,所产生的短路电流较小,不会超出驱动电路20中电子开关的承受能力;另一方面电机10的转速下降到一定值后再进行制动,可以避免电机10转速下降过快,由此制动过程不会造成电动工具100的功能件松动从而降低了功能件脱落的风险。例如,在电动工具100为角磨机时,若是电机10的转速过大时进行制动,会产生较大的制动力矩,此时可能会造成角磨机的磨盘飞出,造成安全事故。因而在电机10的转速下降到第一转速阈值后,再进行制动,可以避免产生过大的制动力矩,即避免让电机10的转速由高转速突然降低至低转速,因而可以降低电动工具100的功能件脱落产生安全事故的风险。
66.本发明实施例所提供的电动工具100,在电动工具100关机时,控制器30先输出第一控制信号,让电机10减速运行,在电机10的转速降低至第一转速阈值时,控制器30输出第二控制信号,使得驱动电路20输出让电机10的定子绕组短接的激励信号,电机10在该激励信号的作用下产生制动力矩,制动电机10。通过先让电机10的转速下降至一定转速后再进行制动控制,可以避免产生过大的制动力而避免电机10转速下降过快,由此可降低在制动过程中电动工具100的功能件松动脱落的风险。同时,在电机10的转速下降至一定转速后,再进行制动控制,电机的定子绕组产生的短路电流较小,不会损坏驱动电路中的电子器件。
67.可选的,在上述实施例的基础上,驱动电路20包括多个电子开关,控制器30被配置为:
68.在接收到关机信号时,输出使多个电子开关按预设顺序导通的第一控制信号,第一控制信号具有第一占空比,第一占空比小于接收到关机信号前控制器30输出的控制信号的占空比;或者,
69.在接收到关机信号时,输出使多个电子开关全部关闭的第一控制信号。
70.其中,预设顺序是指电机10在正常运转时驱动电路20中各个电子开关的导通顺序。
71.第一占空比小于关机前控制器30输出的控制信号的占空比,从而使得驱动电路20输出至电机定子绕组的激励信号的强度小于关机前驱动电路20输出至电机定子绕组的激励信号的强度,电机10的驱动力下降而使得电机10降速运行。例如,在关机前,控制器30输出的控制信号的占空比为100%,则第一控制信号的占空比可以为小于100%的任意占空比,都可以使得电机降速运行。当然,为了快速让电机转速下降至第一转速阈值,可以将第一控制信号的占空比设置为与关机前控制信号的占空比相差较大。
72.当多个电子开关全部关闭时,驱动电路20暂停输出激励信号,电机10因为没有激励信号而失去驱动力,电机转子处于滑行状态,电机10转速下降。
73.下面结合附图对第一控制信号的作用过程作进一步说明。图3为本发明实施例提供的一种驱动电路的结构示意图,参考图3。驱动电路20包括多个电子开关。在一些实施例中,电子开关包括场效应晶体管(fet),在另一些实施例中,电子开关包括绝缘栅双极晶体管(igbt)等。在一些实施例中,驱动电路20为三相桥式电路。具体而言,驱动电路20包括作为高侧开关设置的三个驱动开关q1、q3、q5和作为低侧开关设置的三个驱动开关q2、q4、q6。
74.作为高侧开关的三个驱动开关q1、q3、q5分别设在供电线与电机10的各相线圈之间。作为低侧开关的三个开关元件q2、q4、q6分别设在电机10的各相线圈与地线之间。六个
驱动开关q1-q6的各个栅极端uh、ul、vh、vl、wh、wl与控制器30电性连接,驱动开关的每个漏极或源极与电机10的定子绕组连接。驱动开关q1—q6依据控制器30输出的控制信号以一定频率改变导通或关断状态,从而改变电源模块加载在电机10绕组上的功率状态。
75.示例性的,关机前的控制信号为100%占空比的pwm控制信号,第一控制信号为80%占空比的pwm控制信号,该80%占空比的pwm控制信号控制驱动电路20中的各电子开关按照表一的导通顺序进行导通控制,使得电机转子的转速下降。
76.表一
77.q1和q4导通其他开关均关闭q1和q6导通其他开关均关闭q3和q6导通其他开关均关闭q3和q2导通其他开关均关闭q5和q2导通其他开关均关闭q5和q4导通其他开关均关闭q1和q4导通其他开关均关闭
78.示例性的,第一控制信号控制上下桥臂的六个电子开关q1-q6全部关闭,此时,电机10的定子绕组没有激励信号,从而电机10的转子失去驱动力而处于滑行状态,电机的转速下降。
79.可选的,在上述实施例的基础上,控制器30还被配置为:在电机10的转速降低至第一转速阈值时,输出第二控制信号,以控制高侧开关或低侧开关导通。
80.继续参考图3,第二控制信号控制上桥臂的三个电子开关q1、q3、q5全部导通且下桥臂的三个电子开关q2、q4、q6全部关闭,或者控制下桥臂的三个电子开关q2、q4、q6全部导通且上桥臂的三个电子开关q1、q3、q5全部关闭,此工况下,电机10的定子被短接,产生短路电流,电机转子的动能被转换成电机10定子上的热能而使得电机处于制动状态,电机转子的转速迅速下降。
81.可选的,第二控制信号为占空比恒定的pwm控制信号,以使得高侧开关或低侧开关导通时长为固定时长;或者,
82.第二控制信号为按照预设占空比增量逐步增加的pwm控制信号,以使得高侧开关或低侧开关导通时长按照预设增量逐步增加。
83.其中,当第二控制信号为占空比恒定的pwm控制信号时,处于导通状态的高侧开关或低侧开关被按照固定时长导通。
84.图4为本发明实施例提供的占空比增加的pwm控制信号示意图,参考图4,当第二控制信号为按照预设占空比增量增加的pwm控制信号时,处于导通状态的高侧开关或低侧开关的导通时长按照预设增量逐步增加,这样设置的好处在于,因为转子的转速已经降低,此时通过增加导通时长而获得更大的制动力矩,从而电机10可以尽快停止转动且不影响用户手感。
85.可选的,当第二控制信号为按照预设占空比增量逐步增加的pwm控制信号时,pwm控制信号的初始占空比小于或等于30%。
86.其中,由上述分析可知,电机的转速越高,则进行短接制动时产生的短路电流越大,电机经过初次降速后,若使用较大占空比的控制信号,则仍然可能产生相对较大的短路
电流。本实施例通过将pwm控制信号的初始占空比设置为小于或等于30%,可以避免在电机10高速时产生过大的、超过mos管的承受能力短路电流。在电机10的转速降低为低速后,为了加大制动力矩,即使采用100%占空比的控制信号也不会产生过大的短路电路,因而采用占空比逐步增加的pwm控制信号进行制动不会损坏mos管。
87.可选的,在上述实施例的基础上,控制器30还被配置为:
88.若第二控制信号为占空比恒定的pwm控制信号,则在输出第二控制信号预设时长后,输出第一控制信号;
89.在电机10的转速降低至第二转速阈值时,输出预设时长的第二控制信号;
90.基于电机10的转速与对应转速阈值的比较结果,交替输出第一控制信号和第二控制信号,直至电机10停止转动。
91.如上述分析,在第二控制信号的作用下,电机10的定子绕组会产生短路电流,为了获得较大的制动力矩让电机10快速停止转动,第二控制信号的占空比较大,使得电机10的转速快速下降。此时会因为转速下降太快而造成用户的手感下降,为了解决该问题,本实施例在使用占空比恒定的pwm控制信号作为第二控制信号时,控制器30根据电机10的转速交替输出第一控制信号和第二控制信号,使得电机10交替运行于减速状态和制动状态,一方面通过第二控制信号对电机10进行制动,让电机10尽快停止转动;另一方面通过第一控制信号让电机10减速,使得整个制动过程更加缓和,有助于提升制动过程中的用户手感。
92.示例性的,可在控制器30中预先配置转速阈值列表,控制器30将获取到的电机10的当前转速与该列表中的各个阈值进行比较,每当电机10转速下降至对应的转速阈值时,控制器30就输出第二控制信号,对电机10进行短接制动,这样交替运行,快速且温和地制动电机10。
93.可选的,图5为本发明实施例提供的另一种电动工具的结构框图。在上述实施例的基础上,参考图5。该电动工具还包括:
94.电源模块40,用于接入交流电以为定子绕组供电;
95.电压转换模块41,用于接入电源模块40接入的交流电并输出直流总线电压。
96.其中,电源模块40,用于接入交流电以为电机10供电。在一些实施例中,电源模块40包括交流电插头和与交流电插头电性连接的外围电路。其中,交流电插头插入交流电插座以接入交流市电,从而为电机10提供电能来源。在另一实施例中,电源模块40包括其它的能够接入交流电的结构形式及外围电路,例如,交流电插头接入可移动的变电站等方式接入交流电。需要说明的是,电源模块40只需满足能够接入交流电即可,具体的结构和形式在此不作限制。其中,电源模块40所能接入的交流电的取值范围为110v~130v或210v~230v。
97.电压转换模块41用于接入电源模块40接入的交流电并可操作地输出直流总线电压。其中,电压转换模块41包括整流电路411和滤波电容412。
98.整流电路411用于将交流电转换为直流电输出。整流电路411串联在电源模块40和滤波电容412之间,用于接收交流电并将交流电转换为脉动直流电。在一些具体的实施例中,整流电路411包括四个整流桥。
99.滤波电容412用于为来自整流电路411的脉动直流电滤波。滤波电容412串联在整流电路411和驱动电路20之间。在一些实施例中,滤波电容412为小电解电容。在另一些实施例中,滤波电容412是薄膜电容。
100.可选的,在一些实施例中,该电动工具还包括电源子模块42,电源子模块42用于为驱动芯片31和/或控制器30供电。在一些实施例中,电源子模块42与电源模块40连接,以将经电源模块40接入的交流电转换为适配于驱动芯片31和/或控制器30的供电电压输出。例如,在一些实施例中,为了给驱动芯片31供电,电源子模块42将来自电源模块40的交流电电源电压降到15v以为控制器30供电,将电源电压降到3.2v以为驱动芯片31供电。在另一实施例中,电源子模块42与电压转换模块41连接,以将经电源模块40接入的交流电转换为适配于驱动芯片31和/或控制器30的供电电压输出。
101.可选的,在一些实施例中,该电动工具还包括开关装置,开关装置用于启动或者关闭电机10。开关装置位于电源子模块42和驱动芯片31之间。在一些实施例中,开关装置作为电动工具的扳机开关。用户按压扳开关装置使开关装置位于接通位置,驱动芯片31和/或控制器30从电源子模块42接收电信号,电机10上电;用户按压扳机开关装置位于切断位置,切断驱动芯片31和/或控制器30与电源子模块42之间的电性连接,控制器接收到关机信号,控制器控制电机10制动。
102.可选的,图6为本发明实施例提供的一种电动工具制动方法的流程图,该电动工具制动方法可应用于本发明任意实施例所描述的电动工具,用于对电动工具的刹车过程进行制动控制,避免电动工具的刹车速度过大影响到电动工具的机械结构。例如,拥有刹车功能的角磨工具进行刹车时,在刹车速度过大时,磨盘容易松动,存在脱落风险,本发明实施例方法可用于解决该问题。参考图5,该方法具体包括如下步骤:
103.s610、在接收到关机信号时,输出第一控制信号,以控制驱动电路输出预设强度的激励信号或暂停输出激励信号,使得电机降速运行。
104.其中,控制器输出第一控制信号至驱动电路,驱动电路会按照第一控制信号对应分配输入侧的电压信号,以输出一定强度的激励信号至电机,驱动电机动作。具体到本实施例中,驱动电路根据第一控制信号向电机输出降速运行的激励信号,以让电机转速下降。
105.在一个实施例中,驱动电路包括多个电子开关;控制器输出使多个电子开关按预设顺序导通的第一控制信号,第一控制信号具有第一占空比,第一占空比小于接收到关机信号前控制器输出的控制信号的占空比。
106.其中,相比于驱动电路驱动电机正常运转的工况,在第一控制信号的作用下,驱动电路不改变各个电子开关的导通顺序,仅减小输出至电子开关的激励信号的强度,以降低对电机的驱动力,控制电机降速运行。
107.在一个实施例中,控制器输出使多个电子开关全部关闭的第一控制信号。
108.其中,驱动电路中的多个电子开关全部关闭时,驱动电路暂停向电机输出激励信号,电机失去驱动力处于滑动状态,转速逐步降低。
109.s620、在电机的转速降低至第一转速阈值时,输出第二控制信号,以控制驱动电路输出让定子绕组短接的激励信号,制动电机。
110.其中,第二控制信号用于制动电机,以使得电机的转速快速下降。具体而言,在第二控制信号的作用下,电机的定子绕组被短接,此时电机处于发电状态,被短接的定子绕组产生短路电流而产生大量热量消耗电机的转子的动能,使得电机的转速得以快速下降。
111.在一个实施例中,驱动电路中的多个电子开关包括高侧开关和低侧开关;控制器输出第二控制信号,以控制高侧开关或低侧开关导通,制动电机,其中,高侧开关导通或低
侧开关导通的导通时长固定或按照预设增量逐步增加。
112.其中,当驱动电路中的高侧电子开关全部导通或低侧电子开关全部导通时,电机的定子绕组被短接,发电状态的电机在短接的定子绕组产生短路电流,该短路电流产生的制动力阻碍电机转动,从而控制电机减速运行。
113.当第二控制信号为占空比按照预设占空比增量逐步增加的pwm控制信号时,高侧开关或低侧开关的导通时长按照预设增量逐步增加。采用占空比逐步增加的pwm控制信号进行制动控制的好处在于,在制动过程中,因为电机的转速持续下降,因而产生的短路电流也持续减小,相应地在,制动力矩也逐步减小,此时,增加pwm控制信号的占空比,可以增加电机定子绕组的短路电流而弥补因为转速下降而减小的短路电流,即弥补了转速下降而减小的制动力矩,使得制动力矩相对稳定,从而快速将电机刹停,实现快速制动。
114.值得注意的是,在关机前,电机的转速较高,若直接对电机进行短接制动,则因为电机的高转速会产生较大的短路电流,而大短接电流不仅可能会损坏驱动电路中的开关管,且因为转速下降过快,可能会导致电机的功能件松动而脱落,造成安全事故。本实施例通过先输出第一控制信号,将电机的转速降低后再对电机进行短接控制,可以避免出现上述问题。
115.本发明实施例提供的电动工具制动方法,在电动工具关机时,控制器先输出让电机减速运行的控制信号,使得电机的转速下降,在电机的转速下降至设定的转速阈值时,控制器输出制动电机的控制信号,使得电机的定子绕组产生短路电流,短路电流产生阻碍电机的转子转动的制动力矩,在制动力矩的作用下,电机得以降速运行。通过先将控制电机降速运行,降低电机的转速后再对电机进行制动控制,让电机快速停止运转,可以避免在大转速时立即制动产生过大的短路电流而损坏驱动电路中的开关管,且可以避免电机的转速下降过快,从而降低了电动工具的功能件松动和脱落的风险。
116.可选的,在上述技术方案的基础上,在输出第二控制信号,以控制驱动电路输出让定子绕组短接的激励信号之后,该方法还包括:
117.若第二控制信号为占空比恒定的pwm控制信号,则在输出第二控制信号预设时长后,输出第一控制信号;
118.在电机的转速降低至第二转速阈值时,输出预设时长的第二控制信号;
119.基于电机的转速与对应转速阈值的比较结果,交替输出第一控制信号和第二控制信号,直至电机停止转动。
120.其中,当第二控制信号的占空比恒定时,一方面要使得短路电流小于驱动电路中电子开关管的额定电流,另一方面还要控制电机的减速度小于关机前电机的加速度。在满足上述条件的情况下,为了尽快刹停电机,需要输出较大占空比的控制信号,以获得相对较大的制动力矩。而当制动力矩较大时,会使得电机的转速下降太快,从而造成用户的使用手感下降。为此,本实施例在使用占空比恒定的pwm控制信号进行制动时,控制器根据电机的转速交替输出第一控制信号和第二控制信号,以控制电机交替运行于减速状态和制动状态,让整个制动过程更加缓和,从而在实现尽快刹停电机的同时提升用户的使用手感。
121.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行
了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
