1.本发明属于图书馆还书技术领域,尤其涉及一种智能图书管理机器人。
背景技术:
2.长期以来,国内图书馆内图书的归还整理均由人工完成,面对有较大归还量的图书馆或者还书高峰期时,做到实时整理并准确放置图书书架比较困难,即使完成也需要投入较多的人力物力,国外部分图书馆采用自动仓储式图书馆,但其不仅造价高,而且还要对图书馆的普通书柜进行全面改造,推广应用的可能性极低,国外还有一部分采用图书搬运机器人,同样其成本昂贵不利,难以普及。
技术实现要素:
3.本发明的目的在于:为了解决人工存放书籍较为费力的问题,而提出的一种智能图书管理机器人。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种智能图书管理机器人,包括机身,所述机身底部固定连接有底盘;
6.所述底盘包括上底板,所述上底板底部固定连接有下机架,所述下机架底部固定连接有下底板,所述下底板顶部中心位置通过固定连接有雷达支架,所述雷达支架顶部固定连接有雷达底板,所述雷达底板顶部中心位置固定连接有激光雷达,所述下底板底部四周均固定连接有移动机构。
7.作为上述技术方案的进一步描述:
8.所述移动机构包括电机支架,所述电机支架顶部与下底板固定连接,所述电机支架一侧开设有凹槽,且凹槽内通过螺钉可拆卸安装有轴承,所述轴承内转动连接有阶梯轴,所述阶梯轴一端通过端盖固定安装有全向轮,所述电机支架一侧通过四个螺钉固定安装直流电机,所述直流电机有输出轴一端固定连接有移动联轴器,所述移动联轴器远离直流电机的一端与阶梯轴一端固定安装。
9.作为上述技术方案的进一步描述:
10.所述机身包括上机架,所述上机架内部固定连接有书架,所述书架一侧设置有推书机构,所述推书机构上方设置有升降机构。
11.作为上述技术方案的进一步描述:
12.所述推书机构包括横向推杆,所述横向推杆内部通过直线轴承活动连接有横向光杆,所述横向光杆一侧固定安装有托盘,所述托盘一侧固定安装有纵向推杆,所述纵向推杆通过直线轴承与托盘一侧的纵向光杆活动连接。
13.作为上述技术方案的进一步描述:
14.所述托盘一侧通过安装板固定安装有恒向步进电机,所述恒向步进电机一侧通过皮带与横向推杆连接,所述托盘底部通过安装板固定安装有第纵向步进电机,所述纵向步进电机通过皮带与纵向推杆传动连接。
15.作为上述技术方案的进一步描述:
16.所述升降机构包括顶板,所述顶板与上机架固定连接,所述顶板底部固定连接有下固定板,所述顶板固定连接在上机架顶部,所述上机架固定连接有下固定板,所述下固定板顶部两侧均固定连接有竖直导轨,所述竖直导轨内滑动连接有竖直滑块,且两个竖直滑块之间固定连接有上固定板,下固定板上下两侧分别固定连接有上驱动机构与下驱动机构,所述上驱动机构与下驱动结构分别活动连接有绳索,所述绳索一端活动连接有动滑轮,所述动滑轮与上固定板连接。
17.作为上述技术方案的进一步描述:
18.所述上固定板顶部一侧通过安装板固定安装有第三步进电机,所述上固定板顶部一侧通过安装板固定安装有水平步进电机,所述水平步进电机输出轴一端固定连接有水平联轴器,所述上固定板顶部转动连接有横向丝杠,所述横向丝杠与水平联轴器固定连接,所述横向丝杠外表面螺纹连接有导程螺母,所述上固定板顶部固定安装有横向光杆,所述横向光杆外表面滑动连接有水平滑块。作为上述技术方案的进一步描述:
19.所述上驱动机构与下驱动机构均包括绳索驱动机构,所述上驱动机构一侧固定连接有上固定螺钉,所述下驱动机构一侧固定连接有下固定螺钉。
20.作为上述技术方案的进一步描述:
21.所述绳索驱动机构包括电机底座,所述电机底座与顶板固定连接,所述电机底座一侧固定安装有提升步进电机,所述提升步进电机输出轴一端固定连接有提升联轴器,所述提升联轴器远离提升步进电机的一端固定连接有主动齿轮,所述主动齿轮一端固定连接有主动轴,所述主动轴外表面转动连接有主动轴轴承座,所述主动轴一端外表面固定安装有主动卷绳螺钉,所述主动卷绳螺钉固定有绳索一端,所述绳索经主动转向定滑轮转向,所述主动轴一端固定连接有主动防脱套筒,所述主动齿轮一侧啮合有从动齿轮,所述从动齿轮一端固定连接有从动轴,所述从动轴外表面转动连接有从动轴轴承座,所述从动轴一端外表面固定安装有从动卷绳螺钉,所述从动卷绳螺钉固定有绳索一端,所述绳索经从动转向定滑轮转向,所述从动轴一端固定连接有从动防脱套筒。
22.作为上述技术方案的进一步描述:
23.所述主动转向定滑轮、提升动滑轮、上底板和从动转向定滑轮均设有导向孔,且导向孔内滑动连接有绳索,所述绳索一端固定于上固定螺钉或下固定螺钉外表面,且绳索一端经提升动滑轮、主动转向定滑轮或从动转向定滑轮绕至主动轴或从动轴并由主动卷绳螺钉或从动卷绳螺钉固定。
24.综上所述,由于采用了上述技术方案,本发明的有益效果是:
25.1、本发明中,通过设置推书机构,推书机构上有横向推杆和纵向推杆,横向步进电机与纵向步进电机通过皮带传动可以将图书推进书架或者从书架取出,从而实现机器人对书籍的自动存取,减少人工操作,实现书籍的自动化存取,提高了工作效率。
26.2、本发明中,通过设置移动机构,下底板和上底板通过下机架连接,底盘通过激光雷达以及程序控制实现自主导航行走,通过控制四个移动步进电机的转向和速度调控,可以完成底盘向任意方向移动,使得机器人可以在图书馆内灵活移动,方便机器人移动至不同的书架附近,从而方便对书籍的存取,提高机器人的灵活性。
27.3、本发明中,通过设置升降机构与绳索驱动机构,上固定板通过定滑轮与绳索驱
动装置连接,可以完成竖直的运动,上固定板横向装有横向丝杠和横向步进电机,可以完成横向的运动,这两个运动可以完成推书机构的竖直和横向运动,使得推书机构可以到达书架的各列各行,使得机器人能够适用于不同高度不同类型的书架,无需工作人员对书架进行改装,提高了机器人的适用性。
附图说明
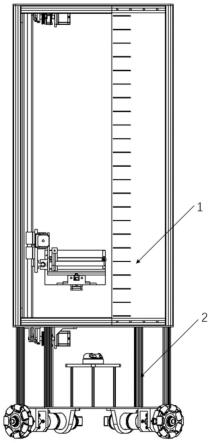
28.图1为本发明提出的一种智能图书管理机器人的正视平面结构示意图;
29.图2为本发明提出的一种智能图书管理机器人的底盘立体结构示意图;
30.图3为本发明提出的一种智能图书管理机器人的机身正视剖面结构示意图;
31.图4为本发明提出的一种智能图书管理机器人的移动机构的立体结构示意图;
32.图5为本发明提出的一种智能图书管理机器人的升降机构的正视平面结构示意图;
33.图6为本发明提出的一种智能图书管理机器人的升降机构的后视平面结构示意图
34.图7为本发明提出的一种智能图书管理机器人的推书机构的俯视平面结构示意图;
35.图8为本发明提出的一种智能图书管理机器人的推书机构装配体侧视平面结构示意图;
36.图9为本发明提出的一种智能图书管理机器人的上驱动装配体结构示意图;
37.图10为本发明提出的一种智能图书管理机器人的下驱动装配体结构示意图;
38.图11为本发明提出的一种智能图书管理机器人的绳索驱动装配体结构示意图。
39.图例说明:1、机身;11、升降机构;111、上驱动机构;112、竖直导轨;113、绳索;114、下固定板;115、水平步进电机;116、水平联轴器;117、上固定板;118、横向光杆;119、顶板;120、导程螺母;121、横向丝杠;122、水平滑块;123、下驱动机构;124、竖直滑块;125、动滑轮;12、推书机构;31、横向推杆;32、托盘;33、横向光杆;34、纵向推杆;35、纵向光杆;36、横向步进电机;37、纵向步进电机;13、上机架;14、书架;2、底盘;21、上底板;22、下机架;23、下底板;24、移动机构;241、直流电机;242、电机支架;243、全向轮;244、端盖;245、阶梯轴;246、轴承;247、移动联轴器;25、雷达支架;26、雷达底板;27、激光雷达;41、上固定螺钉;42、绳索驱动机构;51、主动转向定滑轮;52、主动防脱套筒;53、主动轴;54、主动卷绳螺钉;55、主动轴轴承座;56、提升步进电机;57、电机底座;58、从动转向定滑轮;59、从动防脱套筒;510、从动轴;511、从动卷绳螺钉;512、从动轴轴承座;513、从动齿轮;514、主动齿轮;515、提升联轴器;43、下固定螺钉。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
41.请参阅图1-11,本发明提供一种技术方案:一种智能图书管理机器人,包括机身1,机身1底部固定连接有底盘2,底盘2包括上底板21,上底板21底部固定连接有下机架22,下
机架22底部固定连接有下底板23,下底板23顶部中心位置通过固定连接有多个雷达支架25,雷达支架25顶部固定连接有雷达底板26,雷达底板26顶部中心位置固定连接有激光雷达27,下底板23底部四周均固定连接有移动机构24,移动机构24包括电机支架242,电机支架242顶部与下底板23固定连接,电机支架242一侧开设有凹槽,且凹槽内通过螺钉可拆卸安装有轴承246,轴承246内转动连接有阶梯轴245,阶梯轴245一端通过端盖244固定安装有全向轮243,电机支架242一侧通过四个螺钉固定安装直流电机241,直流电机241有输出轴一端固定连接有第一联轴器247,第一联轴器247远离直流电机241的一端与阶梯轴245一端固定安装。
42.实施方式具体为:通过设置移动机构24,下底板23和上底板21通过下机架22连接,底盘2通过激光雷达27以及程序控制实现自主导航行走,通过控制四个直流电机241的转向和速度调控,可以完成底盘2向任意方向移动,使得机器人可以在图书馆内灵活移动,方便机器人移动至不同的书架14附近,从而方便对书籍的存取,提高机器人的灵活性。
43.机身1包括多个上机架13,上机架13内部固定连接有书架14,书架14一侧设置有推书机构12,推书机构12上方设置有升降机构11,推书机构12包括横向推杆31,横向推杆31内部通过直线轴承246活动连接有横向光杆33,横向光杆33一侧固定安装有托盘32,托盘32一侧固定安装有纵向推杆34,纵向推杆34通过直线轴承246与托盘32一侧的纵向光杆35活动连接,托盘32一侧通过安装板固定安装有横向步进电机36,横向步进电机36一侧通过皮带与横向推杆31出的传动连接,托盘32底部通过安装板固定安装有纵向步进电机37,纵向步进电机37通过皮带与纵向推杆34传动连接。
44.实施方式具体为:通过设置推书机构12,推书机构12上有横向推杆31和纵向推杆34,通过皮带传动可以将图书推进书架14或者从书架14取出,从而实现机器人对书籍的自动存取,减少人工操作,实现书籍的自动化存取,提高了工作效率。
45.升降机构11包括顶板119,顶板119固定连接在上机架13顶部,上机架13固定连接有下固定板114,下固定板114顶部两侧均固定连接有竖直导轨112,竖直导轨112内滑动连接有竖直滑块124,且两个竖直滑块124之间固定连接有上固定板117,下固定板114上下两侧分别固定连接有上驱动机构111与下驱动机构123,上驱动机构111与下驱动结构一端均活动连接有绳索113,绳索113一端活动连接有动滑轮125,动滑轮125与上固定板117固定板连接,上固定板117顶部一侧通过安装板固定安装有水平步进电机115,水平步进电机115输出轴一端固定连接有水平联轴器116,上固定板117顶部转动连接有横向丝杠121,横向丝杠121与水平联轴器116固定连接,横向丝杠121外表面螺纹连接有导程螺母120,上固定板117顶部固定安装有横向光杆118,横向光杆118外表面滑动连接有水平滑块122,上驱动机构111与下驱动机构123均包括绳索驱动机构42,上驱动机构111一侧固定连接有上固定螺钉41,下驱动机构123一侧固定连接有下固定螺钉43,绳索驱动机构42包括电机底座57,电机底座57与顶板119固定连接,电机底座57一侧固定安装有提升步进电机56,提升步进电机56输出轴一端固定连接有提升联轴器515,提升联轴器515远离提升步进电机56的一端固定连接有主动齿轮514,主动齿轮514一端固定连接有主动轴53,主动轴53外表面转动连接有主动轴轴承座55,主动轴53一端外表面固定安装有主动卷绳螺钉54,主动卷绳螺钉54固定有绳索113一端,绳索113经主动转向定滑轮51转向,主动轴53一端固定连接有主动防脱套筒52,主动齿轮514一侧啮合有从动齿轮513,从动齿轮513一端固定连接有从动轴510,从动轴
510外表面转动连接有从动轴轴承座512,从动轴510一端外表面固定安装有从动卷绳螺钉511,从动卷绳螺钉511固定有绳索113一端,绳索113经从动转向定滑轮58转向,从动轴510一端固定连接有从动防脱套筒59,主动转向定滑轮51、提升动滑轮125、上底板21和从动转向定滑轮58均设有导向孔,且导向孔内滑动连接有绳索113,绳索113一端固定于上固定螺钉41或下固定螺钉43外表面,且绳索113一端经提升动滑轮125、主动转向定滑轮51或从动转向定滑轮58绕至主动轴53或从动轴510并由主动卷绳螺钉54或从动卷绳螺钉511固定。。
46.实施方式具体为:通过设置升降机构11与绳索驱动机构42,上固定板117通过定滑轮与绳索113驱动装置连接,可以完成竖直的运动,上固定板117横向装有横向丝杠121和水平进电机115,可以完成横向的运动,这两个运动可以完成推书机构12的竖直和横向运动,使得推书机构12可以到达书架14的各列各行,使得机器人能够适用于不同高度不同类型的书架14,无需工作人员对书架14进行改装,提高了机器人的适用性。
47.工作原理:使用时,上底板21和顶板119上设有绳索113驱动装置,上固定板117通过定滑轮与绳索113驱动装置连接,可以完成竖直的运动,上固定板117横向装有横向丝杠121和水平进电机115,可以完成横向的运动,这两个运动可以完成推书机构12的竖直和横向运动,使得推书机构12可以到达书架14的各列各行,推书机构12上有横向推杆31和纵向推杆34,通过皮带传动可以将图书推进书架14或者从书架14取出,机器的底盘2是由四个电机支座成90
°
安装在下底板23上,下底板23和上底板21通过下机架22连接。通过控制四个直流电机241的转向和速度,可以完成底盘2向任意方向移动,使得机器人可以在图书馆内灵活移动。
48.当需要还书时,工作人员将书推放置托盘32内,通过升降机构11将书运送到机器内书架14的空置区,推书机构12的横向运动将书送至机器内部的书架14中,然后复位,等待归还下一本书,当机器内部书架14存储满后,机器通过激光雷达27,自主定位走到图书所在的图书馆书架14处,当需要取书时,升降装置移到特定图书的位置,推书机构12的横向推杆31伸进书架14将图书拉出到托盘32内,再通过纵向推杆34将书取出。
49.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。