1.本发明涉及生物医疗领域,具体涉及椎间融合器及其制造方法、系统、智能制造设备及介质。
背景技术:
2.自椎间融合器用于脊椎融合并取得成功以来,椎间融合器已经广泛应用于临床,为很多患者减轻了痛苦。但是目前的椎间融合器为厂家按照固定的型号和尺寸批量生产的,其形态、大小是固定的。但是每个患者的椎间盘及相邻上下终板的结构、尺寸、骨密度都不相同,手术植入的椎间融合器并不能完美契合患者的需求。
技术实现要素:
3.本发明要解决的技术问题在于椎间融合器并不能完美契合患者的需求,针对现有技术的上述缺陷,提供一种椎间融合器及其制造方法、系统、智能制造设备及介质,具有更好的生物力学匹配性能,可以加快融合的同时降低椎体的受力形变风险。
4.本发明解决其技术问题所采用的技术方案是:提供一种椎间融合器的制造方法,包括:
5.获取目标患者医学影像数据,根据所述医学影像数据获取所述感兴趣区域的参考骨密度值,所述感兴趣区域包括待植入位置及其邻近区域;
6.根据所述参考骨密度值获取参考杨氏模量,获取与所述参考杨氏模量匹配的目标孔隙率,生成具有所述目标孔隙率的多孔骨架结构;
7.根据所述医学影像数据获取椎间融合器尺寸信息,根据所述椎间融合器尺寸信息对所述多孔骨架结构进行边缘调整,生成目标椎间融合器结构,根据所述目标椎间融合器结构生成目标椎间融合器。
8.其中,所述获取与所述参考杨氏模量匹配的目标孔隙率的步骤,包括:
9.根据以下公式获取所述目标孔隙率:
10.e/esolid=a*(1-porosity)b11.其中,e表示所述参考杨氏模量,esolid表示在没有孔洞存在时结构本身的杨氏模量,porosity表示所述目标孔隙率,a和b为常数。
12.其中,所述根据所述椎间融合器尺寸信息和所述目标孔隙率生成目标椎间融合器结构的步骤,包括:
13.根据所述目标孔隙率生成所述多孔骨架结构,根据所述融合尺寸信息对所述多孔骨架结构进行边缘调整,生成所述目标椎间融合器结构;或
14.将所述椎间融合器尺寸信息作为所述多孔骨架结构生成的限制范围,生成满足所述限制范围的多孔骨架结构,将所述满足所述限制范围的多孔骨架结构作为所述目标椎间融合器结构。
15.其中,所述生成具有所述目标孔隙率的多孔骨架结构的步骤,包括:
16.通过多面体单元结构生成方法生成具有所述目标孔隙率的三维多晶体结构,对所述三维多晶体结构的边界线进行几何增粗处理,获取所述多孔骨架结构。
17.其中,所述根据所述椎间融合器尺寸信息对所述多孔骨架结构进行边缘调整,生成目标椎间融合器结构的步骤,包括:
18.根据所述椎间融合器尺寸信息生成满足临床需求的椎间融合器边框;
19.将所述多孔骨架结构和所述椎间融合器边框通过布尔运算融合为所述目标椎间融合器结构。
20.其中,所述根据所述医学影像数据获取椎间融合器尺寸信息的步骤,包括:
21.根据所述医学影像数据获取待植入区域的高度信息和长度信息,根据所述高度信息和所述长度信息获取所述椎间融合器尺寸信息;
22.所述生成满足所述椎间融合器尺寸信息的椎间融合器边框的步骤之后,包括:
23.根据所述医学影像数据获取所述待植入区域的上下相邻终板角度信息,根据所述高度信息和所述角度信息获取所述椎间融合器边框之间的间隙和相对角度。
24.其中,所述根据目标椎间融合器结构生成目标椎间融合器的步骤,包括:
25.根据目标椎间融合器结构生成制造文件,将所述制造文件导入增材制造软件,通过增材制造的方式生成所述目标椎间融合器。
26.本发明解决其技术问题所采用的技术方案是:提供一种椎间融合器的制造系统,包括:
27.获取模块,用于获取目标患者的医学影像数据,根据所述医学影像数据获取所述感兴趣区域的参考骨密度值,所述感兴趣区域包括待植入位置及其邻近区域;
28.结构模块,用于根据所述参考骨密度值获取参考杨氏模量,获取与所述参考杨氏模量匹配的目标孔隙率,生成具有所述目标孔隙率的多孔骨架结构;
29.生成模块,用于根据所述医学影像数据获取椎间融合器尺寸信息,根据所述椎间融合器尺寸信息对所述多孔骨架结构进行边缘调整,生成目标椎间融合器结构,根据所述目标椎间融合器结构生成目标椎间融合器。
30.本发明解决其技术问题所采用的技术方案是:提供一种椎间融合器,包括多孔骨架结构,所述椎间融合器为通过如上所述的方法制造获取。
31.本发明解决其技术问题所采用的技术方案是:提供一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上所述方法的步骤。
32.本发明解决其技术问题所采用的技术方案是:提供一种智能制造设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上所述方法的步骤。
33.本发明的有益效果在于,与现有技术相比,本发明通过获取包括目标患者感兴趣区域(包括待植入位置及其邻近区域)的参考骨密度值,根据所述参考骨密度值获取参考杨氏模量,获取与所述参考杨氏模量匹配的目标孔隙率,生成具有所述目标孔隙率的多孔骨架结构,根据所述医学影像数据获取椎间融合器尺寸信息,生成与所述融合尺寸信息匹配的目标椎间融合器结构,根据所述目标椎间融合器结构生成目标椎间融合器,使得目标椎间融合器与目标患者匹配,具有更好的生物力学匹配性能,其结构参考目标患者的人体骨质的微观结构,利于成骨过程,可以加快融合的同时降低椎体的受力形变风险。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
35.其中:
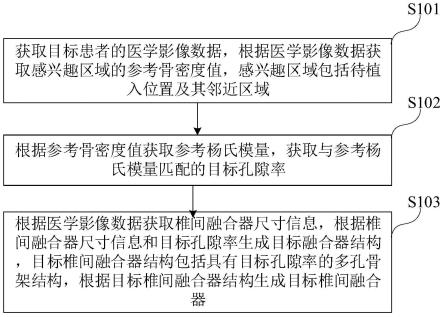
36.图1是本发明提供的椎间融合器的制造方法的第一实施例的流程示意图;
37.图2是本发明提供的一视角的医学影像数据的一实施例的示意图;
38.图3是本发明提供的另一视角的医学影像数据的一实施例的示意图;
39.图4是本发明提供的又一视角的医学影像数据的一实施例的示意图;
40.图5为本发明提供的多孔骨架结构的一实施例的结构示意图;
41.图6a为本发明提供的目标椎间融合器的第一实施例的结构示意图;
42.图6b为本发明提供的目标椎间融合器的第二实施例的结构示意图;
43.图6c为本发明提供的目标椎间融合器的第三实施例的结构示意图;
44.图6d为本发明提供的目标椎间融合器的第四实施例的结构示意图;
45.图7是本发明提供的椎间融合器的制造方法的第二实施例的流程示意图;
46.图8为本发明提供的voronoi三维多晶体划分的方式划分方式的第一结构示意图;
47.图9为本发明提供的voronoi三维多晶体划分的方式划分方式的第二结构示意图;
48.图10为本发明提供的voronoi三维多晶体划分的方式划分方式的第三结构示意图;
49.图11为本发明提供的voronoi三维多晶体划分的方式划分方式的划分的三维多晶体结构的一实施例的结构示意图;
50.图12为本发明提供的三维多晶体结构的一实施例的结构示意图;
51.图13为图12的三维多晶体结构生成的多孔骨架结构的一实施例的结构示意图;
52.图14是本发明提供的椎间融合器下边框的结构示意图;
53.图15是本发明提供的椎间融合器边框的一实施例的结构示意图;
54.图16是本发明提供的目标椎间融合器结构的又一实施例的结构示意图;
55.图17是本发明提供的目标椎间融合器结构的另一实施例的结构示意图
56.图18是本发明提供的椎间融合器的制造系统的一实施例的结构示意图;
57.图19是本发明提供的智能制造设备的一实施例的结构示意图;
58.图20是本发明提供的存储介质的一实施例的结构示意图。
具体实施方式
59.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
60.请结合参阅图1,图1是本发明提供的椎间融合器的制造方法的第一实施例的流程示意图。本发明提供的椎间融合器的制造方法包括如下步骤:
61.s101:获取目标患者的医学影像数据,根据医学影像数据获取感兴趣区域的参考骨密度值,感兴趣区域包括待植入位置及其邻近区域。
62.在一个具体的实施场景中,获取目标患者感兴趣区域,感兴趣区域包括植入目标椎间融合器的区域,也即是待植入位置邻近区域,例如包括与待植入位置邻近的若干节椎体和/或肌肉、脂肪组织等。利用医学影像设备获取目标患者的医学影像数据,在本实施场景中,通过计算机断层扫描技术(computed tomography,ct)获取医学影像数据,在其他实施场景中,也能通过其他医学影像方法获取医学影像数据。请结合参阅图2-图4,图2是本发明提供的一视角的医学影像数据的一实施例的示意图,图3是本发明提供的另一视角的医学影像数据的一实施例的示意图,图4是本发明提供的又一视角的医学影像数据的一实施例的示意图。如图2-图4中所示的,被圈出的区域为感兴趣区域。
63.获取感兴趣区域的上下相邻终板中至少一个的终板骨密度值,终板骨密度值可以通过ct获取,上下相邻终板为目标椎间融合器植入后与目标椎间融合器相邻的上方椎体的下终板和与目标椎间融合器相邻的下方椎体的上终板。进一步地,能够结合医学影像数据中的肌肉和脂肪的密度获取终板骨密度值。在本实施场景中,获取上下两个终板的骨密度值的平均值(例如,算术平均值和加权平均值中的任一个)作为参考骨密度值,在其他实施场景中还可以是获取上终板或下终板的骨密度值作为参考骨密度值。
64.s102:根据参考骨密度值获取参考杨氏模量,获取与参考杨氏模量匹配的目标孔隙率。
65.在一个具体的实施场景中,根据参考骨密度值获取参考杨氏模量,杨氏模量是描述固体材料抵抗形变能力的物理量,也叫拉伸模量。在本实施场景中,参考文献中利用力学测试得到的参考杨氏模量-骨密度关系如下:
66.e[gpa]=2.89*(bmd[g/cc])
1.05
[0067]
其中,e为参考杨氏模量,bmd为参考骨密度值。
[0068]
目标孔隙率与参考杨氏模量成指数关系,能够根据参考杨氏模量获取与参考杨氏模量匹配的目标孔隙率。例如,根据以下公式计算目标孔隙率:
[0069]
e/esolid=a*(1-porosity)b[0070]
其中,e表示参考杨氏模量,esolid表示在没有孔洞存在时结构本身的杨氏模量,porosity表示目标孔隙率,a和b为常数。
[0071]
s103:根据医学影像数据获取椎间融合器尺寸信息,根据椎间融合器尺寸信息和目标孔隙率生成目标椎间融合器结构,目标椎间融合器结构包括具有目标孔隙率的多孔骨架结构,根据目标椎间融合器结构生成目标椎间融合器。
[0072]
在一个具体的实施场景中,目标椎间融合器是需要植入到待植入位置的,因此其外形轮廓需要与待植入位置以及上下相邻终板相匹配和契合,才能够在植入后起到很好的稳定和支撑的效果。根据医学影像数据(例如图2-图4中的任意一幅或者多幅)获取椎间融合器尺寸信息。椎间融合器尺寸信息包括目标椎间融合器的各个表面的形状、结构、弧度等等,以及目标椎间融合器各个表面之间的夹角等等。
[0073]
根据椎间融合器尺寸信息和目标孔隙率生成目标椎间融合器结构,可以是将椎间融合器尺寸信息作为多孔骨架结构生成的限制范围,生成满足限制范围的多孔骨架结构,将满足限制范围的多孔骨架结构作为目标椎间融合器结构。还可以是先根据目标孔隙率生
成多孔骨架结构,根据融合尺寸信息对多孔骨架结构进行边缘调整,生成目标椎间融合器结构。
[0074]
请结合参阅图5,图5为本发明提供的多孔骨架结构的一实施例的结构示意图。如图5中所示的是具有不同的目标孔隙率的多孔骨架结构,左侧的多孔骨架结构的目标孔隙率较高,右侧的多孔骨架结构目标孔隙率较低。
[0075]
在本实施场景中,多孔骨架结构为图5中所示的正方体结构,根据椎间融合器尺寸信息对多孔骨架结构进行边缘调整,例如,对多孔骨架结构进行切割生成目标椎间融合器结构。根据目标椎间融合器结构生成目标椎间融合器。例如,根据目标椎间融合器结构生成制造文件,将制造文件导入增材制造软件,通过增材制造的方式生成目标椎间融合器。请结合参阅图6a-图6d,图6a-图6d为本发明提供的目标椎间融合器结构的不同实施例的结构示意图。
[0076]
在其他实施场景中,可以将椎间融合器尺寸信息作为多孔骨架结构生成的限制范围,直接生成图6a-图6d所示的目标椎间融合器结构。
[0077]
具体地说,可以将目标椎间融合器结构保存为cad(computer aided design,计算机辅助设计)文件(例如,stp、stl等),将cad文件导入增材制造软件做制造前处理;在打印前预处理阶段,进行分层划分处理,根据实际使用的制造材料调整层厚,将完成分层处理的cad文件提交制造设备。
[0078]
在本实施场景中,制造目标椎间融合器的材料为钛合金(如ti6al4v)或者钽金属(ta)粉末,其制备方法为选区激光烧结(selective laser melting,slm)或电子束熔融(electron beam melting,ebm)。在其他实施场景中,还能够使用非金属材料如氮化硅(silicon nitride)或者聚醚醚酮(peek)制造目标椎间融合器,可以使用熔融沉积成型(fused filament modeling)来进行制造。
[0079]
在一个实施场景中,用slm工艺的ti6al4v粉末来制造目标椎间融合器,其工艺参数参考范围是:激光功率200~400kw,扫描速度800~1500mm/s,粉末颗粒15~55micrometers。
[0080]
在其他实施场景中,在获取到目标椎间融合器后,对目标椎间融合器进行后处理工作,例如表面处理工艺。以聚醚醚酮椎间融合器为例,采用的表面处理工艺为羟基磷灰石表面镀膜(hydroxyapatite coating,ha coating)。
[0081]
通过上述描述可知,在本实施例中获取包括目标患者感兴趣区域的参考骨密度值,根据参考骨密度值获取参考杨氏模量,获取与参考杨氏模量匹配的目标孔隙率,据椎间融合器尺寸信息和目标孔隙率生成目标椎间融合器结构,根据目标椎间融合器结构生成目标椎间融合器,使得目标椎间融合器与目标患者匹配,具有更好的生物力学匹配性能,其结构参考目标患者的人体骨质的微观结构,利于成骨过程,可以加快融合的同时降低椎体的受力形变风险。
[0082]
请结合参阅图7,图7是本发明提供的椎间融合器的制造方法的第二实施例的流程示意图。本发明提供的椎间融合器的制造方法包括如下步骤:
[0083]
s201:获取目标患者的医学影像数据,根据医学影像数据获取感兴趣区域的参考骨密度值,感兴趣区域包括待植入位置及其邻近区域。
[0084]
s202:根据参考骨密度值获取参考杨氏模量,获取与参考杨氏模量匹配的目标孔
隙率。
[0085]
在一个具体的实施场景中,步骤s201-s202与本发明提供的椎间融合器的制造方法的第一实施例中的步骤s101-s102中的对应内容基本一致,此处不再进行赘述。
[0086]
s203:通过多面体单元结构生成方法生成具有目标孔隙率的三维多晶体结构,对三维多晶体结构的边界线进行几何增粗处理,获取多孔骨架结构。
[0087]
在一个具体的实施场景中,多面体单元结构生成技术为特定空间内目标多面体单元结构的单元数目和单元大小提供了控制理论。在一个实施场景中多面体单元结构生成技术为voronoi(可控沃洛维依)三维多晶体划分的方式生成具有目标孔隙率的三维多晶体结构。
[0088]
请结合参阅图8-图11,图8为本发明提供的voronoi三维多晶体划分的方式划分方式的第一结构示意图,图9为本发明提供的voronoi三维多晶体划分的方式划分方式的第二结构示意图,图10为本发明提供的voronoi三维多晶体划分的方式划分方式的第三结构示意图,图11为本发明提供的voronoi三维多晶体划分的方式划分方式的划分的三维多晶体结构的一实施例的结构示意图。
[0089]
根据图8-图11可知,在本实施场景中以正方体为例进行说明,首先获取三维多晶体结构边界范围和多晶体数目,结构边界范围可以根据经验获取,或者目标患者的感兴趣区域的体积获取,还可以根据椎间融合器尺寸信息获取。多晶体数目可以根据目标孔隙率获取。在结构边界范围根据多晶体数目进行均匀划分,并获取划分后的每个晶体的核心原点,可以生成图8中所示的第一结构。所有核心原点划分核心随机点找寻范围,可以生成图9中所示的第二结构。之后获取对每个随机点找寻范围内找寻唯一核心随机点,可以生成图10所示的第三结构。将核心随机点作为多晶体划分的核心点进行沃洛维依划分,可以获取图11中所示的三维多晶体结构。
[0090]
请结合参阅图12和图13,图12为本发明提供的三维多晶体结构的一实施例的结构示意图,图13为图12的三维多晶体结构生成的多孔骨架结构的一实施例的结构示意图。在本实施例中,对三维多晶体结构的边界线进行几何增粗处理,以使得三维多晶体结构转化为多孔形状的多孔骨架结构。在一个实施场景中,在三维多晶体结构在不改变孔洞数量的情况下,利用几何参数改变孔洞骨架粗细的方式实现目标孔隙率,或者通过改变孔洞大小本身来进行孔隙率调节实现目标孔隙率。在本实施场景中,在获取多孔骨架结构后通过软件编程算法获取多孔骨架结构的代码表现形式。
[0091]
s204:根据医学影像数据获取椎间融合器尺寸信息,根据椎间融合器尺寸信息生成满足临床需求的椎间融合器边框;将多孔骨架结构和椎间融合器边框通过布尔运算融合为目标椎间融合器结构。
[0092]
在一个具体的实施场景中,根据医学影像数据获取椎间融合器尺寸信息,具体地说,可以根据医学影像数据获取待植入位置的高度信息和长度信息,根据高度信息和长度信息获取椎间融合器尺寸信息。结合实际临床需要生成椎间融合器边框。请结合参阅图14,图14是本发明提供的椎间融合器一侧边框的结构示意图。根据医学影像数据获取感兴趣区域的上下相邻终板角度信息,根据高度信息和角度信息获取椎间融合器边框之间的间隙和相对角度。按照实际临床需要,进一步调整椎间融合器边框的之间的间隙和相对角度。请结合参阅图15,图15是本发明提供的椎间融合器边框的一实施例的结构示意图。将上述步骤
中获取的多孔骨架结构和调整过间隙和相对角度的椎间融合器边框通过布尔运算融合,多孔骨架结构只保留椎间融合器边框之间的间隙范围,还可以进一步对得到的结果进行处理,以使得多孔隙骨架结构填充满椎间融合器边框主体,从而得到目标椎间融合器结构。请结合参阅图16,图16是本发明提供的目标椎间融合器结构的又一实施例的结构示意图。
[0093]
在本实施场景中,椎间融合器边框为上下两侧的边框,在其他实施场景中,椎间融合器边框包括目标椎间融合器各个面的(例如上下面和内外侧面)的边框。请结合参阅图17,图17是本发明提供的目标椎间融合器结构的另一实施例的结构示意图。图17所示的目标椎间融合器结构具有上下面边框和外侧面边框。
[0094]
s205:根据目标椎间融合器结构生成目标椎间融合器。
[0095]
在一个具体的实施场景中,步骤s205与本发明提供的椎间融合器的制造方法的第一实施例中的步骤s03中对应的部分基本一致,此处不再进行赘述。
[0096]
通过上述描述可知,在本实施例中根据医学影像数据的获取待植入位置的高度信息和长度信息获取椎间融合器尺寸信息,根据医学影像数据获取的感兴趣区域的上下相邻终板角度信息获取椎间融合器边框之间的间隙和相对角度,将多孔骨架结构和椎间融合器边框通过布尔运算融合为目标椎间融合器结构,能够使得目标椎间融合器的结构更加匹配目标患者的植入需求,具有更好的生物力学匹配性能,其结构参考目标患者的人体骨质的微观结构,利于成骨过程,可以加快融合的同时降低椎体的受力形变风险。
[0097]
请参阅图18,图18是本发明提供的椎间融合器的制造系统的一实施例的结构示意图。椎间融合器的制造系统10包括:获取模块11、结构模块12和生成模块。
[0098]
获取模块11用于获取目标患者的医学影像数据,根据医学影像数据获取感兴趣区域的参考骨密度值,感兴趣区域包括待植入位置及其邻近区域。结构模块12用于根据参考骨密度值获取参考杨氏模量。生成模块13用于根据医学影像数据获取椎间融合器尺寸信息,根据椎间融合器尺寸信息和目标孔隙率生成目标椎间融合器结构,目标椎间融合器结构包括具有目标孔隙率的多孔骨架结构,根据目标椎间融合器结构生成目标椎间融合器。
[0099]
获取模块11还用于获取感兴趣区域的上下相邻终板中至少一个的终板骨密度值,根据终板骨密度值计算出参考骨密度值。
[0100]
结构模块12还用于根据以下公式获取目标孔隙率:
[0101]
e/esolid=a*(1-porosity)b[0102]
其中,e表示参考杨氏模量,esolid表示在没有孔洞存在时结构本身的杨氏模量,porosity表示目标孔隙率,a和b为常数。
[0103]
生成模块13还用于根据目标孔隙率生成多孔骨架结构,根据融合尺寸信息对多孔骨架结构进行边缘调整,生成目标椎间融合器结构;生成模块13还用于将椎间融合器尺寸信息作为多孔骨架结构生成的限制范围,生成满足限制范围的多孔骨架结构,将满足限制范围的多孔骨架结构作为目标椎间融合器结构。
[0104]
结构模块12还用于通过多面体单元结构生成方法生成具有目标孔隙率的三维多晶体结构,对三维多晶体结构的边界线进行几何增粗处理,获取多孔骨架结构。
[0105]
生成模块13还用于根据椎间融合器尺寸信息生成满足临床需求的椎间融合器边框;将多孔骨架结构和椎间融合器边框通过布尔运算融合为目标椎间融合器结构。
[0106]
生成模块13还用于根据医学影像数据获取感兴趣区域的高度信息和长度信息,根
据高度信息和长度信息获取椎间融合器尺寸信息;根据医学影像数据获取感兴趣区域的上下相邻终板角度信息,根据高度信息和角度信息获取椎间融合器边框之间的间隙和相对角度。
[0107]
生成模块13还用于根据目标椎间融合器结构生成制造文件,将制造文件导入增材制造软件,通过增材制造的方式生成目标椎间融合器。
[0108]
通过上述描述可知,在本实施例中椎间融合器的制造系统获取包括目标患者感兴趣区域的参考骨密度值,根据参考骨密度值获取参考杨氏模量,获取与参考杨氏模量匹配的目标孔隙率,根据医学影像数据获取椎间融合器尺寸信息,根据椎间融合器尺寸信息和目标孔隙率生成目标椎间融合器结构,目标椎间融合器结构包括具有目标孔隙率的多孔骨架结构,根据目标椎间融合器结构生成目标椎间融合器,使得目标椎间融合器与目标患者匹配,具有更好的生物力学匹配性能,其结构参考目标患者的人体骨质的微观结构,利于成骨过程,可以加快融合的同时降低椎体的受力形变风险。
[0109]
请参阅图19,图19是本发明提供的智能制造设备的一实施例的结构示意图。智能制造设备20包括处理器21、存储器22。处理器21耦接存储器22。存储器22中存储有计算机程序,处理器21在工作时执行该计算机程序以实现如图1、图6所示的方法。详细的方法可参见上述,在此不再赘述。
[0110]
请参阅图20,图20是本发明提供的存储介质的一实施例的结构示意图。存储介质30中存储有至少一个计算机程序31,计算机程序31用于被处理器执行以实现如图1、图6所示的方法,详细的方法可参见上述,在此不再赘述。在一个实施例中,计算机可读存储介质30可以是终端中的存储芯片、硬盘或者是移动硬盘或者优盘、光盘等其他可读写存储的工具,还可以是服务器等等。
[0111]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,的程序可存储于一非易失性计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0112]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0113]
以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
