1.本发明涉及一种测量方法,具体涉及一种转炉空炉重心位置及质量的在线测量方法,属于冶金行业转炉炉体监测技术领域。
背景技术:
2.转炉炼钢是钢铁企业的关键装备,监控炉衬状态对于保证炼钢生产安全和产品质量具有重要意义。转炉的炉衬在炼钢过程中会被侵蚀,由于各厂的工艺操作水平及炉衬维护制度有所差异,在实际的生产过程中,炉役后期炉底耐材的侵蚀情况存在较大差别,炉底耐材既有被侵蚀的情况,又有厚度不变的情况,还有炉底上涨的异常情况。由于炉衬侵蚀、炉底上涨、炉口结渣等情况均会导致炉体的重心变化。空炉的重心和质量是炉衬状态的反映,其变化即可衡量炉衬化情况,也与转炉倾动力矩密切相关。目前对于炉衬状态,一般是在停炉或生产间歇情况下进行的,对生产组织和效率有直接的不良影响。炉衬状态的实时变化趋势更加难以掌握。因此,迫切的需要一种新的方案解决上述技术问题。
技术实现要素:
3.本发明正是针对现有技术中存在的问题,提供一种转炉空炉重心位置及质量的在线测量方法,该技术方案采用物理动力学知识与控制手段相结合的方式在转炉炼钢的空炉阶段对其重心和质量实施在线测量。
4.为了实现上述目的,本发明的技术方案如下,一种种转炉空炉重心位置及质量的在线测量方法,其特征在于,所述测量方法包括以下步骤一:建立起包含转炉倾动电动机、减速机、炉体三者之间的动力学关系,并以方程形式体现;
5.步骤二、依据所建立的方程推导出空炉重心位置和质量的测量方法;测量方法在炼钢过程中倒渣后的空炉阶段进行,通过自动操控空炉的归位、在特定的炉体倾角区段进行匀速运行和加速运行等实验来实现。
6.作为本发明的一种改进,所述步骤一中,转炉倾动电动机、减速机、炉体三者之间的动力学关系方程形式如下:
[0007][0008]
式(1)中,m
t
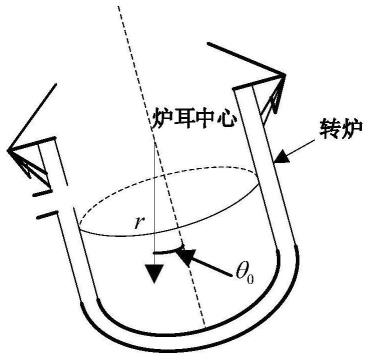
为电机输出力矩(n.m);dω/dt为转炉角加速度;i0为电机及减速机转动惯量(kg.m2);mm为减速机摩擦损耗和炉耳摩擦损耗等效的阻力矩(n.m);m为空炉质量,即炉壳和炉衬的总质量(kg);r为空炉质心与耳轴中心的距离(m);g为重力加速度;α为转炉倾动角度(
°
);θ0为空炉质心对耳轴中心的初始夹角(
°
)。
[0009]
式(1)中的m为空炉质心形成的力矩,m会随电机转向变化而发生数值符号改变,即若电机正转时其为正值,反转时其为负值;
[0010]
利用式(1)进行空炉重心位置及重量测量,使式(1)中的部分变量可预知或可准确
测量,这些变量包括:
[0011]
电机及减速机转动惯量i0,转炉倾动角度α,转炉角速度ω,转炉角加速度dω/dt,m
t
为电机输出力矩m
t
;
[0012]
在确知这些变量基础上,可依据以下步骤间接测量出空炉的重心位置(θ0,r)和质量。
[0013]
作为本发明的一种改进,所述步骤二依据所建立的方程推导出空炉重心位置和质量的测量方法,具体如下:
[0014]
步骤1:测量空炉质心对耳轴中心的初始夹角θ0;
[0015]
在空转炉回归炉口向上的位置后,打开抱闸,若空炉重心与耳轴中心连线不在垂直向位置,炉体会转动,直到停滞到空炉重心与耳轴中心连线垂直向下的位置,记录的α角即为θ0测量值。
[0016]
步骤2:依据测得的m
t
、α,间接测量出总摩擦力矩mm;
[0017]
在测量mm时,需要避免在某一倾角点受偶然因素干扰对mm测量值准确度的影响,我们选择在α的一个区域(α
1-α2)范围,对mm连续测量,并将这一区间所有测量数据取平均值作为最终mm测量值,具体做法如下:
[0018]
在α的(α
1-α2)区间匀转速((dω/dt)=0,)往返运行,测得对应α角的电机输出转矩m
t
,其中,在转炉倾角α情况下,正转时的转矩m
tz
(α),反转时的转矩m
tf
(α),将(dω/dt)=0代入式(1),得:
[0019]mt
=
±
mgrsin(α θ0) mmꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0020]
将m
tz
(α)和m
tf
(α)代入(2)得:
[0021][0022]
将式(3)中的2式相加,整理后得:
[0023]mm
(α)=(m
tz
(α) m
tf
(α))/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0024]mm
(α)是在转炉倾角α位置的阻力矩,需在(α
1-α2)区间进行均值滤波,具体公式如下:
[0025][0026]
步骤3:依据测得的m
t
、α,求出mr;
[0027]
由式(3)可导出:
[0028]
mr(α)=(m
tz
(α)-m
tf
(α))/(2gsin(α θ0))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0029]
步骤4:依据测得的mm、m
t
、α、dω/dt,间接测量出空炉转动惯量mr2;
[0030]
在α的(α
1-α2)区间匀加速转速运行,测得对应α角的空炉转动惯量mr2,为实现这一目标,对电机转矩进行精确控制,设定m
t
=m(α) m*,其中,m*为恒定值,将设定的m
t
代入式(1),可推导出
[0031]
mr2(α)=(m
*-mm)/(dω/dt)-i0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0032]
步骤5:求转炉重心到炉耳中心距离r;
[0033]
式(7)除以式(6),得
[0034]
r(α)=2mr2(α)/mr(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0035]
对式(8)进行均值滤波:
[0036][0037]
步骤6:求转炉重量m;
[0038]
将式(6)两端取平方运算,再与式(7)相除,得
[0039]
m(α)=(mr(α))2/mr2(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0040]
对式(10)进行均值滤波:
[0041][0042]
依据本发明的以上6个步骤可测量出空炉的重心位置:θ0、r,质量m。
[0043]
相对于现有技术,本发明的优点如下:本发明提出的在线空炉重心和质量测量的方法,可在转炉炼钢过程中实现在线自动监测炉衬状态的目标,通过在线空炉的重心位置可以判断出转炉炉衬侵蚀、炉底上涨、炉口结渣等情况,在线空炉的重心位置的变化可以很清楚的判断出转炉炉衬的侵蚀和融损是在转炉的上部还是下部,前大面还是后大面,这样有利于预测和及时发现生产安全隐患,及时指导操作人员补炉、护炉、处理炉口积渣等。有利于提高和优化转炉倾动的操作和控制方法;同时,可减少转炉炉衬测量的生产时间和人工成本,通常转炉炉衬的测量是通过使用移动式转炉测厚仪来实现的,占用生产时间,因此使用本方法可提高生产效率。
附图说明
[0044]
图1为本发明所涉及的转炉零位示意图;
[0045]
图2为本发明具体实施方式的转炉倾动电机速度控制模式与转矩制控制模式切换示意图。
具体实施方式:
[0046]
为了加深对本发明的理解,下面结合附图对本实施例做详细的说明。
[0047]
实施例1:参见图1,一种转炉空炉重心位置及质量的在线测量方法,所述测量方法包括以下:
[0048]
步骤一:建立起包含转炉倾动电动机、减速机、炉体三者之间的动力学关系,并以方程形式体现;
[0049]
步骤二、依据所建立的方程推导出空炉重心位置和质量的测量方法;测量方法在炼钢过程中倒渣后的空炉阶段进行,通过自动操控空炉的归位、在特定的炉体倾角区段进行匀速运行和加速运行等实验来实现。
[0050]
所述步骤一中,转炉倾动电动机、减速机、炉体三者之间的动力学关系方程形式如下:
[0051]
[0052]
式(1)中,m
t
为电机输出力矩(n.m);dω/dt为转炉角加速度;i0为电机及减速机转动惯量(kg.m2);mm为减速机摩擦损耗和炉耳摩擦损耗等效的阻力矩(n.m);m为空炉质量,即炉壳和炉衬的总质量(kg);r为空炉质心与耳轴中心的距离(m);g为重力加速度;α为转炉倾动角度(
°
);θ0为空炉质心对耳轴中心的初始夹角(
°
)。
[0053]
式(1)中的m为空炉质心形成的力矩,m会随电机转向变化而发生数值符号改变,即若电机正转时其为正值,反转时其为负值;
[0054]
利用式(1)进行空炉重心位置及重量测量,使式(1)中的部分变量可预知或可准确测量,这些变量包括:
[0055]
电机及减速机转动惯量i0,转炉倾动角度α,转炉角速度ω,转炉角加速度dω/dt,m
t
为电机输出力矩m
t
;
[0056]
在确知这些变量基础上,可依据以下步骤间接测量出空炉的重心位置(θ0,r)和质量。
[0057]
所述步骤二依据所建立的方程推导出空炉重心位置和质量的测量方法,具体如下:
[0058]
步骤1:测量空炉质心对耳轴中心的初始夹角θ0;
[0059]
在空转炉回归炉口向上的位置后,打开抱闸,若空炉重心与耳轴中心连线不在垂直向位置,炉体会转动,直到停滞到空炉重心与耳轴中心连线垂直向下的位置,记录的α角即为θ0测量值。
[0060]
步骤2:依据测得的m
t
、α,间接测量出总摩擦力矩mm;
[0061]
在测量mm时,需要避免在某一倾角点受偶然因素干扰对mm测量值准确度的影响,我们选择在α的一个区域(α
1-α2)范围,对mm连续测量,并将这一区间所有测量数据取平均值作为最终mm测量值,具体做法如下:
[0062]
在α的(α
1-α2)区间匀转速((dω/dt)=0,)往返运行,测得对应α角的电机输出转矩m
t
,其中,在转炉倾角α情况下,正转时的转矩m
tz
(α),反转时的转矩m
tf
(α),将(dω/dt)=0代入式(1),得:
[0063]mt
=
±
mgrsin(α θ0) mmꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0064]
将m
tz
(α)和m
tf
(α)代入(2)得:
[0065][0066]
将式(3)中的2式相加,整理后得:
[0067]mm
(α)=(m
tz
(α) m
tf
(α))/2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0068]mm
(α)是在转炉倾角α位置的阻力矩,需在(α
1-α2)区间进行均值滤波,具体公式如下:
[0069][0070]
步骤3:依据测得的m
t
、α,求出mr;
[0071]
由式(3)可导出:
[0072]
mr(α)=(m
tz
(α)-m
tf
(α))/(2gsin(α θ0))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0073]
步骤4:依据测得的mm、m
t
、α、dω/dt,间接测量出空炉转动惯量mr2;
[0074]
在α的(α
1-α2)区间匀加速转速运行,测得对应α角的空炉转动惯量mr2,为实现这一目标,对电机转矩进行精确控制,设定m
t
=m(α) m*,其中,m*为恒定值,将设定的m
t
代入式(1),可推导出
[0075]
mr2(α)=(m
*-mm)/(dω/dt)-i0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0076]
步骤5:求转炉重心到炉耳中心距离r;
[0077]
式(7)除以式(6),得
[0078]
r(α)=2mr2(α)/mr(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0079]
对式(8)进行均值滤波:
[0080][0081]
步骤6:求转炉重量m;
[0082]
将式(6)两端取平方运算,再与式(7)相除,得
[0083]
m(α)=(mr(α))2/mr2(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)对式(10)进行均值滤波:
[0084][0085]
依据本发明的以上6个步骤可测量出空炉的重心位置:θ0、r,质量m。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
