1.本实用新型涉及电池加工的领域,特别是涉及一种极耳整平机构。
背景技术:
2.锂电池在生产过程中需要进行多道工序,例如卷绕、焊接等,导致电芯上的极耳会出现不同程度的弯曲,为了防止后续极耳焊接时出现虚焊甚至是焊接失败的问题,需要对电芯的极耳进行整平操作。
3.目前极耳整平操作主要依靠工人手动完成,但是工人手动操作的方式不但效率低下,而且对极耳整平的质量参差不齐,导致整平质量欠佳。随着自动化技术的发展,也有不少厂家自主研发极耳整平装置来对极耳进行整平操作,但是由于电芯极耳的弯曲方向比较多样,现有的整平装置存在整平失败的可能,因此设计一种极耳整平机构,以提高对极耳的整平效率及整平质量,同时提高对极耳整平的可靠性,是本领域技术人员需要解决的技术问题。
技术实现要素:
4.本实用新型的目的是克服现有技术中的不足之处,提供一种能够提高对极耳的整平效率及整平质量,并且提高整平可靠性的极耳整平机构。
5.本实用新型的目的是通过以下技术方案来实现的:
6.一种极耳整平机构,包括:
7.基座;
8.顶升组件,所述顶升组件包括顶升驱动件及顶升板,所述顶升驱动件设置于所述基座上,所述顶升板设置于所述顶升驱动件上,所述顶升驱动件用于带动所述顶升板进行升降运动,所述顶升板上设置有用于承载极耳的载料台;及
9.整平组件,所述整平组件包括横移驱动件、横移板、压紧驱动件、平整块及压紧轮,所述横移驱动件设置于所述基座上,所述横移板滑动设置于所述基座上,且所述横移板与所述横移驱动件的输出轴连接,所述压紧驱动件设置于所述横移板上,所述平整块设置于所述压紧驱动件的输出轴上,所述压紧轮转动设置于所述平整块靠近所述载料台的一面上;
10.所述压紧驱动件用于带动所述压紧轮将极耳压至所述载料台上,进而使所述横移驱动件带动所述压紧轮在所述载料台上滚动以整平极耳。
11.在其中一个实施例中,所述顶升板还滑动设置于所述基座上。
12.在其中一个实施例中,所述顶升驱动件包括顶升电机、丝杆部及套管,所述顶升电机设置于所述基座上,所述丝杆部设置于所述顶升电机的输出轴上,所述套管螺接于所述丝杆部上,所述顶升板设置于所述套管上,所述顶升电机用于带动所述丝杆部转动时,以使所述套管带动所述顶升板进行升降运动。
13.在其中一个实施例中,所述横移板包括水平块及竖直块,所述水平块滑动设置于
所述基座上,所述竖直块的一端固定设置于所述水平块的底面,所述横移驱动件的输出轴与所述竖直块连接,所述压紧驱动件设置于所述水平块上。
14.在其中一个实施例中,所述水平块的表面与所述竖直块的表面之间的夹角为直角结构。
15.在其中一个实施例中,所述平整块还滑动设置于所述竖直块上。
16.在其中一个实施例中,所述载料台设置有两个,两个所述载料台之间设置有间隔,所述压紧轮设置有两个,两个所述压紧轮一一对应与两个所述载料台相向设置。
17.在其中一个实施例中,所述平整块设置有两个,两个所述平整块之间设置有间隔,两个所述压紧轮一一对应转动设置于两个所述平整块上。
18.在其中一个实施例中,所述压紧轮的长度大于所述载料台的宽度。
19.在其中一个实施例中,所述横移驱动件及所述压紧驱动件均是气缸。
20.与现有技术相比,本实用新型至少具有以下优点:
21.本实用新型的极耳整平机构,包括基座、顶升组件及整平组件,顶升组件包括顶升驱动件及顶升板,顶升驱动件设置于基座上,顶升板设置于顶升驱动件上,顶升驱动件用于带动顶升板进行升降运动,顶升板上设置有用于承载极耳的载料台,整平组件包括横移驱动件、横移板、压紧驱动件、平整块及压紧轮,横移驱动件设置于基座上,横移板滑动设置于基座上,且横移板与横移驱动件的输出轴连接,压紧驱动件设置于横移板上,平整块设置于压紧驱动件的输出轴上,压紧轮转动设置于平整块靠近载料台的一面上,压紧驱动件用于带动压紧轮将极耳压至载料台上,进而使横移驱动件带动压紧轮在载料台上滚动以整平极耳。如此,能够可靠地整平极耳,而且能够有效提高极耳整平效率及整平质量。
附图说明
22.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
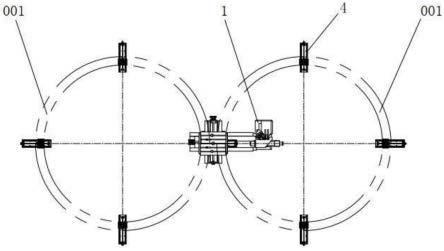
23.图1为本实用新型的一实施方式的极耳整平机构的结构示意图;
24.图2为本实用新型的一实施方式的整平组件的部分结构示意图。
具体实施方式
25.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。
26.请参阅图1,一种极耳整平机构10,包括基座100、顶升组件200及整平组件300,顶升组件200包括顶升驱动件210及顶升板220,顶升驱动件210设置于基座100上,顶升板220设置于顶升驱动件210上,顶升驱动件210用于带动顶升板220进行升降运动,顶升板220上设置有用于承载极耳的载料台230。
27.需要说明的是,顶升驱动件210固定安装在基座100上,顶升板220安装在顶升驱动件210上,由顶升驱动件带动顶升板220进行升降运动。一实施例中,顶升驱动件210可以是气缸,由气缸带动顶升板220进行升降运动。顶升板220的上表面上安装有载料台230,载料
台230用于承托极耳。需要注意的是,本技术的极耳整平机构10能够应用于电池生产线上,当电芯极耳被移送至顶升组件200与整平组件300之间时,由顶升驱动件210带动顶升板220上升,以使得载料台230将电芯极耳顶起。
28.进一步地,请参阅图1,整平组件300包括横移驱动件310、横移板320、压紧驱动件330、平整块340及压紧轮350,横移驱动件310设置于基座100上,横移板320滑动设置于基座100上,且横移板320与横移驱动件310的输出轴连接,压紧驱动件330设置于横移板320上,平整块340设置于压紧驱动件330 的输出轴上,压紧轮350转动设置于平整块340靠近载料台230的一面上。
29.需要说明的是,横移板320滑动安装在基座100上,具体地,横移板320 能够在基座100上进行水平滑动,例如在基座100上安装导轨,将横移板320 安装在导轨上,以使得横移板320能够进行水平滑动。横移驱动件310固定安装在基座100上,横移驱动件310的输出轴与横移板320相连接,以利用横移驱动件310带动横移板320进行水平滑动。一实施例中,横移驱动件310为气缸,利用气缸带动横移板320进行往复式滑动。压紧驱动件330安装固定在横移板320上,平整块340安装在压紧驱动件330的输出轴上,以使得压紧驱动件330带动平整块340运动以靠近或者远离载料台230。其中压紧驱动件330带动平整块340运动的方向与横移驱动件310带动横移板320运动的方向相互垂直,横移驱动件310带动横移板320进行横移运动,而压紧驱动件330则带动平整块340进行升降运动。进一步地,在平整块340靠近载料台230的那一侧面上安装有压紧轮350。其中压紧轮350能够相对于平整块340进行转动,例如压紧轮350与平整块340之间通过轴承安装固定。需要注意的是,压紧轮350 轴心与水平面相平行以使得压紧轮350能够与载料台230共同挤压夹紧电芯极耳。
30.进一步地,压紧驱动件330用于带动压紧轮350将极耳压至载料台230上,进而使横移驱动件310带动压紧轮350在载料台230上滚动以整平极耳。
31.需要说明的是,下面对本技术的极耳整平机构10的工作原理进行说明。首先由顶升驱动件210带动顶升板220上升,以使得载料台230顶起电芯极耳极耳,使得电芯极耳呈水平放置;然后由压紧驱动件330带动平整块340下降以使得平整块340上的压紧轮350将极耳压紧在载料台230上;接着,横移驱动件310带动横移板320水平滑动,使得压紧轮350沿着载料台230滚动。如此,压紧轮350便能够将在载料台230上承托的电芯极耳滚平,达到整平的目的。需要注意的是,本技术中通过顶升驱动件210带动顶升板220上升以使得载料台230承托电芯极耳,从而能够让后续的整平组件300将极耳整平。相比于传统的整平装置,本技术的方案能够更加可靠地整平极耳,而且能够有效提高极耳整平效率及整平质量。
32.请参阅图1,一实施例中,顶升板220还滑动设置于基座100上。需要说明的是,顶升板220由顶升驱动件210带动进行升降运动,为了提高顶升板220 在升降过程中的稳定性,因此将顶升板220设置为沿着基座100进行升降滑动。例如在基座100上还安装有沿着竖直方向延伸的滑轨,将顶升板220安装在滑轨上,从而使得顶升板220能够沿着基座100进行升降滑动。
33.请参阅图1,一实施例中,顶升驱动件210包括顶升电机211、丝杆部212 及套管213,顶升电机211设置于基座100上,丝杆部212设置于顶升电机211 的输出轴上,套管213螺接于丝杆部212上,顶升板220设置于套管213上,顶升电机211用于带动丝杆部212转动时,以使套管213带动顶升板220进行升降运动。
34.需要说明是,顶升电机211固定安装在基座100上,在顶升电机211的输出轴上固定安装丝杆部212,其中丝杆部212为带丝杆副的丝杆,丝杆的一端与顶升电机211固定安装,丝杆副则与套管213固定连接,并且套管213还与顶升板220固定安装,如此,当顶升电机211带动丝杆转动时,丝杆副与丝杆为螺接关系,就会带动顶升板220进行升降运动。需要注意的是,本技术中载料台 230设置为由电机驱动丝杆带动,因此能够更加精准地控制载料台230的升降高度,而压紧驱动件330为气缸,因此能够使得载料台230与压紧轮350准确地在指定高度相对接,从而能够提高对电芯极耳的整平质量。而且,将载料台230 设置为可调整高度的结构,有利于极耳整平机构10在生产使用时进行调机。
35.请参阅图1,一实施例中,横移板320包括水平块321及竖直块322,水平块321滑动设置于基座100上,竖直块322的一端固定设置于水平块321的底面,横移驱动件310的输出轴与竖直块322连接,压紧驱动件330设置于水平块321上。
36.需要说明的是,横移板320由水平块321及竖直块322组成,具体地,水平块321在基座100上水平滑动,竖直块322安装在水平块321上,由水平块 321带动竖直块322进行水平滑动,如此有利于横移驱动件310对横移板320进行推顶滑动。一实施例中,水平块321的表面与竖直块322的表面之间的夹角为直角结构。需要注意的是,将水平块321设置为与竖直块322相垂直的结构,从而使得安装在平整块340能够沿着竖直块322的表面进行升降滑动。进一步地,一实施例中,平整块340还滑动设置于竖直块322上。例如,在竖直块322 上安装滑轨,以使得平整块340沿着滑块进行升降滑动,从而能够提高平整块 340的滑动稳定性。
37.请参阅图1,一实施例中,载料台230设置有两个,两个载料台230之间设置有间隔,压紧轮350设置有两个,两个压紧轮350一一对应与两个载料台230 相向设置。需要说明的是,通过设置两个载料台230,能够同时对两个电芯的极耳进行同步整平,从而能够提高对电芯极耳的整平效率。
38.进一步地,一实施例中,平整块340设置有两个,两个平整块340之间设置有间隔,两个压紧轮350一一对应转动设置于两个平整块340上。需要说明的是,将两个压紧轮350分别安装在两个平整块340上,使得两个压紧轮350 为相互独立的结构,有利于对压紧轮350进行调试安装。
39.请参阅图1,一实施例中,压紧轮350的长度大于载料台230的宽度。需要说明的是,压紧轮350的长度大于载料台230的宽度,能够确保压紧轮350的外侧壁紧密贴合压紧在载料台230的表面,从而能够顺利将电芯极耳进行滚压整平。
40.请参阅图2,一实施例中,整平组件300还包括紧固块360及缓冲弹簧370,紧固块360设置于压紧驱动件330的输出轴上,平整块340滑动设置于紧固块 360上,缓冲弹簧370的两端分别与平整块340及紧固块360相连接。
41.需要说明是,压紧驱动件330用于带动平整块340进行升降运动,以使得平整块340带动压紧轮350靠近或者远离载料台230。为了防止压紧轮350抵接在载料台230时与载料台230硬接触,因此在平整块340与压紧驱动件330之间设置了缓冲弹簧370进行缓冲。如此,利用缓冲弹簧370,能够确保压紧轮350能够可靠在在载料台230上滚压,同时能够避免压紧轮350与载料台230之间因挤压力度过大而损坏。
42.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技
术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。