无刷dc电动机的控制装置
技术领域
1.本发明涉及无刷dc电动机的控制装置。
背景技术:
2.例如,日本专利特开2015-231242号公报中公开了一种驱动无刷dc电动机的控制装置,该无刷dc电动机由具有永磁体的转子、以及卷绕有u、v、w的各相的线圈的定子所构成。无刷dc电动机中,以120deg间隔配置有与各相对应的霍尔传感器,并基于从各传感器输出的检测信号的组合来判定60deg间隔的相位角。无刷dc电动机的各相的线圈经由逆变器电路连接有直流电源,并由逆变器电路以120
°
矩形波驱动来对各相的线圈进行通电。即,预先设定选择性地切换逆变器电路的各相的开关元件的多个通电模式,这些通电模式每隔相位角60deg依次被切换。由此,在相位偏移120deg的状态下,各相的线圈重复120deg的导通期间与60deg的关断期间并依次通电以对转子施加旋转力,从而无刷dc电动机动作。
3.此外,无刷dc电动机根据用途在各种旋转区域中使用,例如,驱动油泵的无刷dc电动机有时要求10~60rpm左右的低旋转区域中的动作。低温时的油粘性较高,因此,如果在通常的旋转区域中驱动余摆线式等油泵,则会在其吸入侧产生空腔或从油封吸入空气,正常的供油变得困难。作为其对策,有时在油的低温时限制泵转速的上限值,作为驱动源的无刷dc电动机要求在低旋转区域中动作。
4.然而,无刷dc电动机中产生的齿槽转矩成为妨碍低旋转区域中的动作的原因,特别地,转子中嵌入有永磁体的所谓的ipm电动机的齿槽转矩较大,因此其影响变得显著。推测齿槽转矩将带来以下的影响。在120
°
矩形波驱动中,当按照某个通电模式对规定的2相的线圈进行通电时,与每个励磁相的转矩相当的驱动转矩在通电期间内保持为与驱动占空比相对应的大致恒定值。另一方面,齿槽转矩在与驱动转矩相同方向的正侧、以及与驱动转矩相反方向的负侧根据相位角而变动。
5.因此,例如,为了启动停止状态的无刷dc电动机,使驱动占空比增加并使流过各相的线圈的驱动电流逐渐增加,在该情况下,如果驱动转矩不超过齿槽转矩的负侧的峰值的绝对值,则转子的相位角无法超过齿槽转矩的负侧的峰值。如果驱动转矩与针对线圈的驱动电流一起增加并超过齿槽转矩的负侧的峰值的绝对值,则转子的相位角超过齿槽转矩的负侧的峰值,转子以与驱动电流对应的速度突然开始旋转。此时的转子的转速可视为能实现的无刷dc电动机的旋转区域的下限。该无刷dc电动机的旋转区域的下限例如停留在比上述油泵的低温时所要求的旋转区域更高的旋转侧。其结果是,无法在所要求的低旋转区域中驱动油泵,一直以来都希望有根本的对策。
技术实现要素:
6.本发明是为了解决上述问题而完成的,其目的在于提供一种无刷dc电动机的控制装置,能使无刷dc电动机在低旋转区域中动作,而不受齿槽转矩的影响。
7.为了达到上述目的,本发明的无刷dc电动机的控制装置是由具有永磁体的转子、
以及卷绕有u、v、w各相的线圈的定子所构成的无刷dc电动机的控制装置,其特征在于包括:相位角检测部,该相位角检测部检测转子的旋转,并生成在随着转子的旋转而产生的齿槽转矩达到妨碍转子的旋转的负侧的峰值附近的定时切换的相位角信号;逆变器电路,该逆变器电路设置在无刷dc电动机的各相的线圈与直流电源之间,并根据驱动信号的输入切换多个开关元件来对各相的线圈进行通电;通电期间计算部,该通电期间计算部对针对无刷dc电动机所设定的目标转速进行时间换算来计算通电期间;以及驱动控制部,该驱动控制部在通电期间计算部计算的每个通电期间将驱动信号选择性地输出到逆变器电路的各开关元件,按照预先设定的多个通电模式在正侧和负侧依次对各相的线圈进行通电,在各通电期间的开始后,使针对与要进行通电的线圈对应的开关元件的驱动信号的占空比逐渐增加,并在相位角检测部生成的相位角信号被切换后执行将驱动信号的占空比向降低方向控制的低旋转模式。
8.作为其它方式,无刷dc电动机的规格可以设定为在齿槽转矩达到负侧的峰值附近的定时,由所述各相的线圈的通电而产生的驱动转矩达到峰值。
9.作为其它方式,相位角检测部可以基于随着转子的旋转从3个霍尔传感器输出的每180deg反转的360deg的信号的组合来生成每60deg切换的相位角信号。
10.作为其它方式,3个霍尔传感器可以分别配置在每当齿槽转矩达到负侧的峰值附近时彼此的信号的组合被变更的相位角。
11.作为其它方式,驱动控制部可以在目标转速小于预先设定的旋转判定值时执行低旋转模式。
12.作为其它方式,驱动控制部可以在目标转速小于预先设定的旋转判定值时执行低旋转模式,另一方面,当目标转速在旋转判定值以上时执行基于120
°
矩形波驱动的通常模式,所述120
°
矩形波驱动在相位角检测部生成的相位角信号的每个切换定时将矩形波的驱动信号选择性地输出到逆变器电路的各开关元件,并按照多个通电模式在正侧和负侧依次对各相的线圈进行通电。
13.作为其它方式,在低旋转模式的执行中,如果相位角检测部生成的相位角信号被切换,则驱动控制部可以中止驱动信号的占空比的增加,并在整个预先设定的待机期间保持该时刻的占空比。
14.作为其它方式,在低旋转模式的执行中,在相位角检测部生成的相位角信号被切换后,驱动控制部可以使驱动信号的占空比阶跃地降低到预先设定的降低值。
15.作为其它方式,在低旋转模式的执行中,在相位角检测部生成的相位角信号被切换后,驱动控制部可以使驱动信号的占空比阶跃地降低到0%。
16.作为其它方式,驱动控制部可以在通电期间结束前保持阶跃地降低到降低值后的驱动信号的占空比,在后续的通电期间中也继续通电的情况下,从后续的通电期间的开始之初使驱动信号的占空比从降低值逐渐增加。
17.作为其它方式,在低旋转模式的执行中,由通电期间计算部计算出的通电期间越长,则驱动控制部越可以使增加驱动信号的占空比时应用的增加率降低。
18.作为其它方式,无刷dc电动机可以是在转子的内部嵌入有永磁体的ipm电动机。
19.作为其它方式,无刷dc电动机可以对吸入和排出油的油泵进行驱动。
20.根据本发明的无刷dc电动机的控制装置,能使无刷dc电动机在低旋转区域中动
作,而不受到齿槽转矩的影响。
附图说明
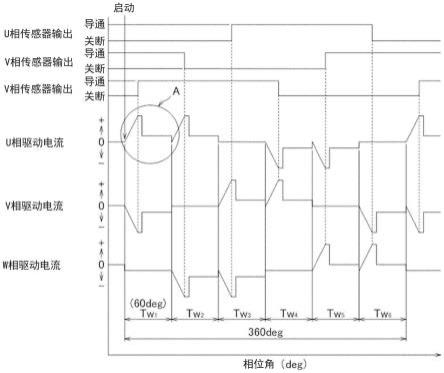
21.图1是示出应用了实施方式1的无刷dc电动机的控制装置的冷却系统的整体结构图。图2是示出电动机控制器的微机的结构的控制框图。图3是示出低旋转模式中的齿槽转矩、相位角信号和驱动转矩之间的关系的图。图4是示出驱动控制部所执行的低旋转控制程序的流程图。图5是示出基于各相的传感器输出的相位角信号的切换定时以及流过各相的线圈的驱动电流的控制状况的图。图6是示出图5中被a所包围的u相的通电期间tw1中的驱动电流的控制状况的详细图。图7是示出低旋转模式下的无刷dc电动机从启动时起的动作状况的时序图。图8是示出实施方式2的u相的通电期间tw1中的驱动电流的控制状况的详细图。图9是示出低旋转模式下的无刷dc电动机从启动时起的动作状况的时序图。图10是示出低旋转模式下的无刷dc电动机的连续运行中的动作状况的时序图。图11是示出流过各相的线圈的驱动电流的控制状况的其它示例的与图6对应的详细图。图12是示出经过待机期间t后使驱动信号的占空比阶跃地降低到0%的其它示例的与图7对应的时序图。图13是示出实施方式3的驱动控制部所执行的低旋转控制程序的流程图。图14是同样地示出δ设定程序的流程图。图15是示出低旋转模式的下限转速下的驱动电流的控制状况的图。
具体实施方式
22.[实施方式1]以下,对将本发明具体化为冷却系统所具备的无刷dc电动机的控制装置的实施方式1进行说明。如图1的整体结构图所示,本实施方式的无刷dc电动机2实现如下功能:驱动冷却系统1的油泵3,使冷却用的油循环来对电动机、发电机等被冷却设备4进行冷却。
[0023]
无刷dc电动机2是具有6极9槽的ipm型电动机,以下说明中,除非有特别限定,否则与相位角有关的说明全部用电气角来表现。众所周知,ipm型的无刷dc电动机2是如下电动机:在转子中嵌入有永磁体,除了利用永磁体的磁体转矩以外,还利用来自定子绕组的磁体感应的磁阻转矩来提高效率。本实施方式的无刷dc电动机2根据其旋转区域切换基于一般的120
°
矩形波驱动的通常模式和本发明特有的低旋转模式来进行动作。低旋转模式中,基于无刷dc电动机2所产生的齿槽转矩来控制u、v、w三相的线圈的通电,其详细情况在后文中阐述。
[0024]
首先,基于图1来说明冷却系统1的整体结构。余摆线式的油泵3与无刷dc电动机2的输出轴2a相连结,油泵3的排出侧经由安装有油冷却器5的管路6连接有被冷却设备4。若
油泵3通过无刷dc电动机2的驱动旋转,则储存于油底壳7的冷却用的油被吸上来,经由管路6和油冷却器5在被冷却设备4中流通,之后返回油底壳7。由此,油在油冷却器5与被冷却设备4之间循环,油在油冷却器5中散热而温度降低,通过该油的流通来冷却被冷却设备4。
[0025]
冷却系统1通过上位控制器8与电动机控制器9的协调控制来动作。实际的无刷dc电动机2的驱动控制由电动机控制器9执行,该控制所需的信息、例如无刷dc电动机2的目标转速等由上位控制器8来设定。
[0026]
上位控制器8由微机10和通信电路11构成,微机10由内置有多个控制程序的存储装置(rom、ram等)、中央处理装置(cpu)、定时计数器等构成。设置于油底壳7的油温传感器12连接到微机10,该油温传感器12所检测出的油底壳7内的油温被输入到微机10。
[0027]
上位控制器9由微机13、通信电路14和逆变器电路15构成,微机13由内置有多个控制程序的存储装置(rom、ram等)、中央处理装置(cpu)、定时计数器等构成。
[0028]
无刷dc电动机2由具有永磁体的未图示的转子、以及卷绕有u、v、w各相的线圈16u、16v、16w的未图示的定子构成,在该各相的线圈16u、16v、16w与直流电源17之间设有逆变器电路15。逆变器电路15通过在正侧的直流母线18与负侧的直流母线19之间对高侧的各相的开关元件uh、vh、wh以及低侧的各相的开关元件ul、vl、wl进行三相桥式连接而构成。
[0029]
各相的开关元件uh、ul、vh、vl、wh、wl的连接点分别连接到对应相的线圈16u、16v、16w的一端,各相的线圈16u、16v、16w的另一端作为共通的中性点20彼此相连接。正侧的直流母线18连接到直流电源17,负侧的直流母线19接地,各开关元件uh、ul、vh、vl、wh、wl施加有直流电压。各开关元件uh、ul、vh、vl、wh、wl连接到微机13,根据从微机13输出的驱动信号来切换各开关元件uh、ul、vh、vl、wh、wl,以使得各相的线圈16u、16v、16w通电。
[0030]
无刷dc电动机2按120deg间隔的相位角配置有u、v、w各相的霍尔传感器21u、21v、21w。根据磁极变化,从各霍尔传感器21u、21v、21w向电动机控制器9的微机13输入每180deg反转的360deg的信号,并通过各信号的组合来生成60deg的相位角信号。
[0031]
上位控制器8和电动机控制器9的微机10、13经由各自的通信电路11、14交换彼此的信息。电动机控制器9的微机13例如将电动机的动作状况(正常/异常)输出到上位控制器8侧。上位控制器8的微机10基于被冷却设备4的状态、油温传感器12检测出的油温,计算适合于冷却当前的被冷却设备4的无刷dc电动机20的目标转速,并输出到电动机控制器9侧。例如,当油温较低时,为了防止在吸入侧产生空腔或从油封吸入空气等故障,对目标转速的上限进行限制,计算比通常温度区域的情况更低的目标转速并输出到电动机控制器9侧。
[0032]
从上位控制器8侧输入有目标转速的电动机控制器9的微机13基于预先设定的旋转判定值与目标转速的比较结果,在通常模式与低旋转模式之间切换驱动无刷dc电动机2的控制模式。
[0033]
目标转速为旋转判定值以上时所选择的通常模式由120
°
矩形波驱动来执行。该120
°
矩形波驱动由于是公知的驱动方式因此仅限于概要说明,但在各开关元件uh、ul、vh、vl、wh、wl内,1相在高侧设为导通、另外1相在低侧设为导通、剩余1相全部设为关断的6种通电模式预先与来自各霍尔传感器21u、21v、21w的信号的组合相对应地来设定。然而,通过在每个根据相位角信号求出的60deg的通电期间内依次切换通电模式,从而将矩形波的驱动信号选择性地输出到各开关元件uh、ul、vh、vl、wh、wl并使其导通。由此,在相位偏移120deg的状态下,各相的线圈16u、16v、16w重复正侧或负侧的120deg的导通期间与60deg的关断期
间并依次通电以对转子施加旋转力,从而无刷dc电动机2动作。
[0034]
电动机控制器9的微机13与此并行地计算能达到目标转速的驱动信号的占空比(duty),并基于该占空比来控制提供给各开关元件uh、ul、vh、vl、wh、wl的驱动信号,并调整流过各相的线圈16u、16v、16w的驱动电流。由此,无刷dc电动机2的驱动转矩被调整并保持在目标转速。
[0035]
如上述那样,在120
°
矩形波驱动中,当按照某个通电模式对规定的2相的线圈16u、16v、16w进行通电时,与每个励磁相的转矩相当的驱动转矩在通电期间内几乎保持为恒定值。因此,为了抵抗齿槽转矩并使转子继续旋转,需要使一定程度的大驱动电流流过线圈16u、16v、16w,其结果是,存在无法在低旋转区域内使无刷dc电动机2动作的问题。
[0036]
这样的消除120
°
矩形波驱动的问题、并使无刷dc电动机2能在低旋转区域中进行动作的模式为低旋转模式。旋转判定值设定为比能利用120
°
矩形波驱动来进行动作的旋转区域的下限稍高的高旋转侧、例如200rpm,在小于该旋转判定值的旋转区域中无刷dc电动机2以低旋转模式来动作。低油温时,为了防止油泵3的故障,由上位控制器8的微机10来计算小于旋转判定值的目标转速,因此,此时的无刷dc电动机2以低旋转模式进行动作。
[0037]
为了执行低旋转模式,电动机控制器9的微机13如图2所示,由相位角检测部23、通电期间计算部24和驱动控制部25构成。
[0038]
相位角检测部23与各相的霍尔传感器21u、21v、21w一起作为本发明的相位角检测部发挥功能,并基于来自各霍尔传感器21u、21v、21w的每180deg反转的360deg的信号的组合,来生成60deg的相位角信号。
[0039]
通电期间计算部24对从上位控制器8输入的无刷dc电动机2的目标转速进行时间换算来计算通电期间tw。这里,该通电期间tw是用于进行60deg旋转的通电期间。
[0040]
驱动控制部25在由通电期间计算部24计算的每个通电期间tw,按照通电模式将驱动信号选择性地输出到逆变器电路15的各开关元件uh、ul、vh、vl、wh、wl以使其导通,由此来使各相的线圈16u、16v、16w在正侧和负侧依次通电。低旋转模式时的通电模式与通常模式的120
°
矩形波驱动同样地,与来自各霍尔传感器21u、21v、21w的信号的组合对应地选择。然而,相对于通电模式中保持在与目标转速对应的规定的占空比的120
°
矩形波驱动,在低旋转模式下,基于齿槽转矩的变动状况来控制驱动信号的占空比,以使得超过通电期间tw内所存在的齿槽转矩的负侧的峰值来使转子旋转。
[0041]
为了执行该占空比控制,微机13的驱动控制部25需要识别随着转子的旋转产生的齿槽转矩的峰值,因此,在本实施方式中利用相位角信号。如图3所示,无刷dc电动机2中,齿槽转矩以相位角60deg为1循环发生变动,在转子的每1次旋转中,在与驱动转矩相同方向的正侧、以及与驱动转矩相反方向的负侧分别产生6次峰值。然后,对于转子,在接受到正侧的齿槽转矩时促进旋转,在接受到负侧的齿槽转矩时妨碍旋转。
[0042]
通过这样的齿槽转矩的作用,例如,在图3所示的齿槽转矩从正侧转到负侧的相位角-30deg和相位角30deg处,形成起到吸引转子并使其保持在该相位角的作用的稳定点1、稳定点2。此外,在齿槽转矩从负侧转向正侧的相位角0deg处,与稳定点相反地,形成起到排斥转子并使其远离该相位角的作用的排斥点。其结果是,未接受驱动转矩时的转子的相位角远离排斥点,例如被吸引到稳定点1、2的某一个并被保持。
[0043]
以该齿槽转矩为前提,设定各相的霍尔传感器21u、21v、21w的相位角。即,如上所
述,通过各霍尔传感器21u、21v、21w的信号的组合,相位角信号在与齿槽转矩相同的循环中每隔60deg进行切换。本实施方式中,预先分别设定配置各霍尔传感器21u、21v、21w的相位角,以使得相位角信号的切换定时与齿槽转矩的负侧的峰值一致。因此,在齿槽转矩达到负侧的峰值的每个60deg,变更各霍尔传感器21u、21v、21w的信号的组合来切换相位角信号。
[0044]
另外,齿槽转矩的负侧的峰值与相位角信号的切换定时未必一定要完全一致。如果相位角信号相对于齿槽转矩的负侧的峰值始终以恒定的关系切换,则即使在双方之间产生一定的偏差也没有问题,设为本发明也包含这样的方式。
[0045]
另一方面,本实施方式的无刷dc电动机使驱动转矩与上述那样变动的齿槽转矩同步,以下,对这一点进行阐述。众所周知,ipm型的无刷dc电动机2中,产生将磁体转矩与磁阻转矩相加而得的合成转矩。本实施方式的低旋转模式中,通电模式与120
°
矩形波驱动没有区别,因此,与励磁中2相的合成转矩之和相当的驱动转矩也作为旋转力作用于转子。磁阻转矩的峰值相对于磁体转矩的峰值处于偏离了45deg的相位角。另一方面,例如根据转子的形状等无刷dc电动机2的规格,即使是相同的磁体转矩,磁阻转矩的峰值也发生增减,与之相伴合成转矩达到峰值的相位角、进而驱动转矩达到峰值的相位角发生变化。该事实意味着通过适当变更无刷dc电动机2的规格,从而能在规定的范围内任意变更驱动转矩的峰值的相位角。
[0046]
着眼于这样的特性,本实施方式中,使驱动转矩的峰值与齿槽转矩的负侧的峰值相一致。即,如图3所示,根据本实施方式的无刷dc电动机2的规格,相对于与磁体转矩的峰值相当的相位角0deg延迟15deg角侧的相位角、换言之在反旋转方向侧的相位角即-15deg处,齿槽转矩达到负侧的峰值。因此,通过适当变更无刷dc电动机2的规格,从而设定为驱动转矩也在相位角-15deg处达到峰值。然而,不一定需要使齿槽转矩的负侧的峰值与驱动转矩的峰值一致,本发明也包含双方的峰值不一致而产生偏差的方式。
[0047]
在各通电期间tw中,为了使转子的相位角超过齿槽转矩的负侧的峰值,需要在齿槽转矩达到负侧的峰值的定时,使驱动转矩超过该负侧的峰值的绝对值。因此,设定产生超过齿槽转矩的负侧的峰值的绝对值的程度的驱动转矩的占空比。这点在驱动转矩的峰值与齿槽转矩的负侧的峰值不一致的情况下也相同。该情况下,在齿槽转矩达到负侧的峰值的相位角-15deg,设定特性线,以使得相当于占空比=100%的驱动转矩充分超过该峰值的绝对值。
[0048]
图4是示出在低旋转模式下由驱动控制部25执行的低旋转控制程序的流程图,该程序在每次基于目标转速计算通电期间tw并开始时重复执行。此外,图5是示出基于各相的传感器输出的相位角信号的切换定时以及流过各相的线圈16u、16v、16w的驱动电流的控制状况的图,图6是示出图5中被a所包围的u相的通电期间tw1中的驱动电流的控制状况的详细图。图5、6中的各相的驱动电流也能视为提供给开关元件uh、ul、vh、vl、wh、wl的驱动信号的占空比、或无刷dc电动机2产生的驱动转矩,之后,有时也基于图5、6来说明驱动信号的占空比、驱动转矩的控制状况,以代替驱动电流。
[0049]
若从上位控制器8输入目标转速,则基于目标转速计算出的通电期间tw开始,图4的程序也随之开始。步骤1中,将提供给各开关元件uh、ul、vh、vl的驱动信号的占空比暂时控制为0%,步骤2中,对于针对开关元件uh、ul、vh、vl的驱动信号的占空比加上设定值δ,
其中,上述开关元件uh、ul、vh、vl与基于通电模式在正侧或负侧要进行通电的相的线圈16u、16v、16w对应。接下来的步骤3中,判定是否切换了相位角信号,no(否定)时返回步骤2。
[0050]
图5、6所示的示例中示出如下情况:基于要使无刷dc电动机2启动的目标转速来计算通电期间tw1。通电期间tw1中,u相的高侧与v相的低侧的开关元件uh、ul、vh、vl导通,各个驱动信号的占空比在驱动控制部25的每个控制间隔中通过步骤2的处理,从0%以规定的增加率开始增加(图6中的点a),与之相伴,驱动转矩也与u相和v相的驱动电流一起逐渐增加。
[0051]
如果基于相位角信号的切换在图4的步骤3中作出“是”(肯定)的判定,则在步骤4中,保持该时刻的驱动信号的占空比(图6中的点b)。接下来的步骤5中,判定是否经过预先设定的待机期间t,当“否”时返回步骤4,如果在步骤5中作出“是”的判定则转移到步骤6。因此,如图5、6所示,驱动信号的占空比在待机期间t被保持,u相和v相的驱动电流保持在相位角信号被切换的时刻的值,并保持为与此时的驱动电流对应的驱动转矩。
[0052]
若经过待机时间t(图6中的点c),则转移至步骤6并使驱动信号的占空比阶跃地下降到预先设定的降低值dutylo(图6中的点d)。接下来的步骤7中判定是否经过了通电期间tw,为“否”时返回步骤6,如果步骤7的判定为“是”则暂时结束程序(图6中的点e)。
[0053]
以上,通电期间tw1的处理结束,基于从上位控制器8输入的新的目标转速来开始后续的通电期间tw2。省略重复的说明,但在该通电期间tw2中,按照通电模式对u相和w相执行与上述相同的图4的程序的处理,在之后的通电期间tw3以后,也按照通电模式依次变更要通电的相并执行同样的处理。
[0054]
基于图3、7来说明以上的由驱动控制部25执行的低旋转模式下的无刷dc电动机2的动作状况。另外,图7的时序图示出如下情况:基于目标转速计算出0.5sec以作为通电期间tw。
[0055]
在无刷dc电动机2的停止状态下驱动信号保持为占空比=0%(图7中的点a),例如,转子在图3、7中相位角-30deg所示的齿槽转矩的稳定点1停止。如果从要启动无刷dc电动机2的上位控制器8输入目标转速,则开始通电期间tw。驱动信号被提供给要通电的相的开关元件uh、ul、vh、vl,占空比从0%起逐渐增加(图7中的箭头ab)。随着该占空比的增加,向线圈16u、16v的驱动电流以及驱动转矩也逐渐增加。因此,转子抵抗齿槽转矩并从稳定点1开始旋转,并使其相位角逐渐接近齿槽转矩的负侧的峰值。
[0056]
如果相位角信号被切换,则驱动信号的占空比的增加被中止并开始待机期间t(图7中的点b),在待机期间t保持该时刻的占空比以使转子的旋转继续(图7中的箭头bc)。如图3所示,在相位角信号被切换的时刻齿槽转矩达到负侧的峰值,相位角信号的切换意味着转子正在旋转,换言之,意味着产生了能够超过负侧的峰值的驱动转矩。由此,可视为不需要进一步增加驱动信号的占空比、进而不需要增加驱动转矩。
[0057]
然而,如图3所示,在相位角信号的切换定时齿槽转矩的绝对值经过负侧的峰值转为减小,但仍然在妨碍转子的旋转的方向上作用。因此,如果在该时刻驱动转矩消失,则转子也有可能反转而不完全超过齿槽转矩的负侧的峰值。中止了占空比的增加的时刻的驱动转矩在待机时间t被维持,因此,转子抵抗齿槽转矩的同时继续旋转,并且可靠地超过齿槽转矩的负侧的峰值并通过相位角0deg的排斥点。根据该说明可知,待机期间t设定为具有转子的相位角能通过齿槽转矩的排斥点的程度的长度的时间。
[0058]
对以上那样的转子超过齿槽转矩的负侧的峰值的过程进行详细说明。驱动信号的占空比随着通电期间tw的开始而逐渐增加,在齿槽转矩达到负侧的峰值的时刻,如图3所示,当前相的驱动转矩也达到峰值。如上所述,设定了产生超过齿槽转矩的负侧的峰值的绝对值的程度的驱动转矩的占空比,因此,转子的相位角通过占空比的增加而可靠地超过齿槽转矩的负侧的峰值。
[0059]
如果驱动转矩的峰值相对于齿槽转矩的负侧的峰值向前进角侧或延迟角侧偏移,则在该情况下,以偏离峰值的较低的驱动转矩来抵抗齿槽转矩。因此,为了使转子的相位角超过齿槽转矩的负侧的峰值,需要将驱动转矩的特性线重新设定到增加侧。该情况下,例如产生无刷dc电动机2的大型化等弊端,但可以得到防止这样的弊端于未然的效果。
[0060]
另一方面,若经过这样的过程而经过待机期间t(图7中的点c),则驱动信号的占空比阶跃地降低到降低值dutylo(图7中的点d),驱动转矩也随之降低。在日本专利特开2015-231242号公报中公开的技术的情况下,无刷dc电动机2突然开始旋转,但通过占空比的阶跃降低来防止这样的情况于未然。此外,通过使驱动信号的占空比降低到降低值dutylo,从而转子超过齿槽转矩的负侧的峰值后的无用的通电被防止,因此在功耗这点上较为优秀。
[0061]
然后,作用于转子的驱动转矩也随着占空比的降低而阶跃地降低,但剩下相当于降低值dutylo的驱动转矩。此外,该时刻的齿槽转矩从负侧通过排斥点转向正侧(图7中的箭头de),因此在促进转子的旋转的方向上作用。因此,即使经过待机期间t后转子也继续旋转,并保持在比相位角30deg的稳定点2稍微靠前进角侧的相位角、换言之旋转方向侧的相位角(图7中的点e),当前的通电期间tw结束。若后续的通电期间tw开始,则驱动信号的占空比暂时降低到0%,由于驱动转矩消失,转子稍微反转到相位角30deg的稳定点2(图7中的点f)。因此,在之前的通电期间tw中,实质上转子的相位角变化了60deg。
[0062]
之后,按照该后续的通电期间tw中设定的通电模式,从图7中的点a起进行与上述同样的动作。这样的占空比控制在每个通电期间tw中重复,转子超过齿槽转矩的负侧的峰值并继续旋转。
[0063]
另外,在通电期间tw中产生的转子的旋转变动例如依赖于无刷dc电动机2的规格、或占空比的增加率、待机期间t、降低值dutylo等各种设定,根据这些设定,转子在齿槽转矩的稳定点、例如上述示例中的稳定点1、2处有时瞬间停止旋转、或不停止旋转。然而,不论哪种情况,转子与通电期间tw同步地进行旋转变动并使阶跃的旋转继续。
[0064]
如上所述,在通常模式下,利用相位角信号来作为用于每60deg依次切换通电模式的指标,与此相对,在低旋转模式下,为了与每60deg的齿槽转矩的负侧的峰值同步地对驱动信号进行占空比控制而利用相位角信号。
[0065]
即,与相位角信号的切换定时无关,对目标转速进行时间换算来设为通电期间tw,并与该通电期间tw同步地依次切换通电模式。在各通电期间tw内,存在妨碍转子的旋转的齿槽转矩的负侧的峰值,将与这些齿槽转矩的负侧的峰值一致的相位角信号的切换定时设为触发,来依次控制随着通电期间tw的开始而增加的驱动信号的占空比。其结果是,可以在对应于齿槽转矩的负侧的峰值的恰当定时中止占空比的增加,并且也可以在恰当的定时执行由在接下来的待机时间t中保持恒定、降低到降低值dutylo和保持降低值dutylo所构成的一系列占空比控制。
[0066]
通过这样的驱动信号的占空比控制,转子可靠地超过当前的通电期间tw内所存在
的齿槽转矩的负侧的峰值。同时,转子超过后续的通电期间tw内所存在的齿槽转矩的负侧的峰值的情况被防止,例如,保持在上述的稳定点2。其结果是,在各通电期间tw内,转子阶跃地旋转,并使相位角从稳定点1以60deg变化到稳定点2。由此,积极控制驱动电流的占空比以使得转子超过齿槽转矩的负侧的峰值,因此,即使是齿槽转矩较大的ipm型的无刷dc电动机2,也能达到上述那样的转子的相位角变化。
[0067]
另一方面,通电期间tw是对目标转速进行时间换算而得的值,因此,不论目标转速的高低如何,均可以视为转子旋转60deg所需的时间。因此,转子在每个通电期间tw内旋转60deg,从而达到目标转速。其结果是,能在通电期间tw内实现规定的转子的相位角变化,而不受到齿槽转矩的影响,由此,能在低旋转区域中使无刷dc电动机2动作。
[0068]
低油温时,为了防止油泵3的故障,从上位控制器8向电动机控制器9侧输出小于旋转判定值的目标转速。此时,通过低旋转模式,无刷dc电动机2进行动作并达到目标转速,因此,能防止低油温时的油泵3的故障于未然,并能在此基础上达到被冷却设备4的冷却这个冷却系统1原本的目的。
[0069]
另外,如上所述,根据无刷dc电动机2的规格等,在稳定点1、稳定点2处转子有时也不瞬间停止旋转,该情况下,通电期间tw内产生的转子的相位角的变化并非准确的60deg。然而,例如,在当前的通电期间tw内的转子的相位角的变化相对于60deg不足的情况下,后续的通电期间tw内的相位角的变化增加相当于该不足的量。因此,即使在各个通电期间tw中相位角的变化产生了差异,如果进行平均化则也为60deg,其结果是能达到目标转速。本发明也包含这种方式。
[0070]
此外,使驱动信号的占空比以规定的增加率随通电期间tw的开始一起增加的目的在于,在通电期间tw内的恰当的定时中止占空比增加,并且可靠且恰当地执行接下来的一系列占空比控制。例如,在使占空比缓慢增加的情况下,在通电期间tw内驱动转矩不超过齿槽转矩的负侧的峰值的绝对值,或者超过的定时延迟,在通电期间tw内执行之后的占空比控制的时间上的余量消失。反之,在使占空比急剧增加的情况下,增加中止的定时没有跟上,例如超过假设的值的过大的占空比在待机时间t中被保持。任何情况下,在通电期间tw内都无法实现期望的转子的相位角变化。
[0071]
在这种观点下,预先设定恰当的设定值δ,并使驱动信号占空比以基于该设定值δ的增加率来增加。由此,能在通电期间tw内恰当地执行驱动信号的占空比控制。其结果是,使转子在通电期间tw内以期望的相位角变化,从而能可靠地实现低旋转区域中的无刷dc电动机2的动作。
[0072]
此外,在经过待机期间t后使驱动信号的占空比阶跃地降低,但保持在降低值dutylo,而不降低到0%,因此,在经过待机期间t后,驱动转矩也留下相当于降低值dutylo的量,转子在与摩擦转矩的稳定点停止,因此,能在后续的通电期间tw内使转子的旋转顺畅地开始。
[0073]
[实施方式2]接着,对将本发明具体化为其它无刷dc电动机2的控制装置后的实施方式2进行说明。与实施方式1的不同点在于,当开始后续的通电期间tw时,使驱动信号的占空比保持在降低值dutylo而不降低到0%,因此,虽没有图示,但在图4的流程图的步骤1中,将驱动信号的占空比控制为降低值dutylo。其它结构与实施方式1相同,因此共通的结构的部分省略重
复的说明,着重阐述不同点。
[0074]
图8是示出对应于实施方式1的图6的驱动电流的控制状况的详细图,示出在通电期间tw1的点a处启动了无刷dc电动机2的情况下的u相的驱动电流的控制状况。如实施方式1中所阐述的那样,经过驱动信号的占空比增加、增加中止(图8中的点b)、在待机时间t保持恒定(图8中的点c),占空比阶跃地下降到降低值dutylo(图8的点d),并保持在降低值dutylo,当前的通电期间tw结束。在后续的通电期间tw2中,也基于通电模式继续对u相的线圈继续通电。此时驱动信号相对于u相的占空比在后续的通电期间tw2的开始之初如实施方式1那样不下降到0%,而通过图4的步骤1的处理维持降低值dutylo,并通过接下来的步骤2的处理从降低值dutylo开始增加(图8中的点e)。另外,在后续的通电期间tw2中保持非通电的相的情况下,如通常那样占空比保持为0%。
[0075]
图9是对应于实施方式1的图7的从启动时的时序图,当前的通电期间tw1内的动作状况为相同内容,但在以下这点上不同:在后续的通电期间tw2开始的时刻,驱动信号的占空比不下降到0%而保持在降低值dutylo(图9中的点a’)。若后续的通电期间tw2开始,则如图10所示,驱动信号的占空比从降低值dutylo开始增加(图10中的点a’),转子立即开始旋转,而不像实施方式1那样反转到稳定点2(图10中的点e)。
[0076]
实施方式1中,在每个通电期间tw中虽然很少但转子反转到稳定点2,并且驱动转矩在稳定点2因占空比=0%而瞬间消失,因此,成为造成转子的旋转不顺畅的原因。本实施方式中,在防止这样的转子反转的基础上,相当于降低值dutylo的驱动转矩持续作用于转子,因此,若后续的通电期间tw开始、驱动信号的占空比增加则开始顺畅地旋转。由于这些原因,能使无刷dc电动机2在低旋转区域中更顺畅地动作。
[0077]
[实施方式3]接着,对将本发明具体化为其它无刷dc电动机2的控制装置后的实施方式3进行说明。与实施方式1、2的不同点在于,根据目标通电期间tw,对使驱动信号的占空比从0%增加后到中止增加为止的期间进行可变控制。以下,为了便于说明,将使该占空比增加的期间称为占空比增加期间ti,并且对于保持增加后的占空比的待机期间t,将之后保持在降低值dutylo的期间称为降低期间t1。此外,将这些加法值称为实际通电期间ta。此外,与待机期间t同样地,降低期间t1也预先设定为固定值。
[0078]
实施方式1、2中,使占空比增加时的设定值δ为固定值,因此占空比的增加率必然也为固定值,不论目标通电期间tw的长度如何,占空比增加期间ti始终为固定长度。另一方面,例如,在执行低旋转模式的旋转区域(例如20~200rpm)中,基于目标转速设定的目标通电期间tw大幅增减,占空比增加期间ti相对于目标通电期间tw所占的比例也必然大幅增减。
[0079]
低旋转模式的上限转速(例如200rpm)下目标通电期间tw为最短,但即使在这种情况下,为了产生能超过齿槽转矩的负侧的峰值的驱动转矩,也预先设定驱动信号的占空比的增加率,进而对设定值δ进行设定。然而,在该设定值δ的设定中,在低旋转模式的下限转速(例如20rpm)下,在较长的目标通电期间tw的极早阶段占空比的增加完成,之后的大部分期间占空比保持在降低值dutylo。换言之,在目标通电期间tw的极早阶段驱动转矩急剧增加,因此,目标通电期间tw内的旋转变动较大,转子的旋转容易变得不稳定。
[0080]
为了改善这种现象,本实施方式中对占空比增加期间ti进行可变控制,为此,微机
13的驱动控制部25执行图13、14所示的流程图。另外,其它结构与实施方式1、2相同,因此共通的结构的部分省略重复的说明,着重阐述不同点。
[0081]
图13是示出在低旋转模式下由驱动控制部25执行的低旋转控制程序的流程图,图14是同样地示出δ设定程序的流程图,图15是示出低旋转模式的下限转速下的驱动电流的控制状况的图。图13的步骤1中暂时将驱动信号的占空比控制为0%,之后在步骤s11中执行设定值δ的设定处理。若开始步骤11的处理,则转移到图14的步骤22。
[0082]
步骤22中,在之前的通电期间中读取作为上次值ta-1存储的实际通电期间ta。接下来的步骤23中,计算目标通电期间tw与实际通电期间的上次值ta-1之间的偏差td。之后在步骤24中,判定偏差td的绝对值|td|是否超过预先设定的死区。判定为“否”时转移到步骤25,在将之前的通电期间中应用的值确定为本次的设定值δ之后结束程序,并转移到图13的步骤2。
[0083]
此外,在步骤24的判定为“是”时转移到步骤26,并判定偏差td是否为0以上。当判定为“是”时转移到步骤27,基于预先设定的校正值对之前的通电期间中应用的设定值δ进行增加校正并设为本次的设定值δ。此外,当步骤26的判定为“否”时转移到步骤28,基于预先设定的校正值对之前的通电期间中应用的设定值δ进行减少校正并设为本次的设定值δ。
[0084]
基于这样设定的设定值δ,在步骤2、3中在每个控制间隔使驱动信号的占空比依次增加。然后,若在步骤3中基于相位角的切换作出“是”的判定,则前进至步骤4。之后的步骤4~7中,如实施方式1所述那样,执行由在待机期间t保持恒定、降低到降低值dutylo、保持降低值dutylo所构成的一系列的占空比控制。最后,在步骤12中,存储本次的通电期间中的实际通电期间ta以作为上次值ta-1。该上次值ta-1在下一个通电期间时在步骤23中被读取,并与目标通电期间tw进行比较。
[0085]
通过以上的处理,若目标通电期间tw在增加方向上变化,则对设定值δ进行增加校正,占空比的增加变得剧烈,若目标通电期间tw在减少的方向上变化,则对设定值δ进行减少校正,占空比的增加变得平缓。其结果是,目标通电期间tw越长,则占空比的增加率越降低。由此,占空比的增加率跟随目标通电期间tw的增加来调整,因此,实际通电期间ta相对于目标通电期间tw几乎保持为相同值。
[0086]
因此,在图15所示的低旋转模式的下限转速下,在实施方式1、2中,如双点划线所示在通电期间tw的极早阶段占空比急剧增加,与此相对,本实施方式中,如实线所示那样使用实际通电期间ta(≈目标通电期间tw)的大部分期间,占空比平缓地增加。其结果是,实际通电期间ta(≈目标通电期间tw)内的旋转变动被抑制,能实现更顺畅的转子的旋转。
[0087]
以上完成了对实施方式的说明,但本发明的方式并不局限于该实施方式。例如,上述各实施方式中,作为驱动冷却系统1所具备的油泵3的无刷dc电动机2的控制装置进行了具体化,但其用途并不限于此,能进行任意变更。
[0088]
此外,上述各实施方式中,作为具有6极9槽的无刷dc电动机2进行了具体化,但只要满足2n极3n槽(n≥1)的条件则能进行任意变更,例如也可以应用于具有2极3槽或8极12槽的无刷dc电动机。
[0089]
此外,上述各实施方式中,如图6或图8所示对驱动信号的占空比进行了控制,但控
制内容并不限于此,例如也可以按照图11所示的特性来控制。在其它示例中,若启动无刷dc电动机2并开始通电期间tw(图11中的点a1),则使驱动信号的占空比阶跃地增加(图11中的点a2),之后以规定的增加率增加。若切换相位角信号(图11中的点b),则在使增加率减少的基础上在待机时间t继续占空比的增加。若经过待机时间t(图11中的点c),则使占空比以规定的下降率逐渐下降(图11中的点d),接着在使下降率减少的基础上继续占空比的降低(图11中的点e1)。之后使占空比保持在降低值dutylo,若后续的通电期间tw开始则使占空比从降低值dutylo增加(图11中的点e2)。即使在这样进行了控制的情况下,也能达到上述实施方式1所述的各种效果,并且在后续的通电期间tw中使占空比从降低值dutylo增加,因此也能达到实施方式2的效果。
[0090]
此外,上述各实施方式中,在经过待机时间t后使驱动信号的占空比阶跃地降低到降低值dutylo,但并不限于此,例如,如图12所示,也可以使占空比阶跃地下降到0%。在比较图6的实施方式1与图8的实施方式2的情况下,使占空比降低到0%的图12的其它示例能完全防止转子超过齿槽转矩的负侧的峰值后的无用的通电,在功耗这点上最优秀。然而,在占空比=0%时驱动转矩消失,因此,转子的停止位置因与作用于转子的摩擦转矩之间的关系而变得不确定,转子的旋转存在不顺畅的倾向。
[0091]
如实施方式1那样,如果在经过待机时间t后不使驱动信号的占空比降低为0%而保持在降低值dutylo,则转子在与摩擦转矩的稳定点处停止,因此,与图12的其它示例相比后续的通电期间tw中的旋转开始变得顺畅。此外,如实施方式2那样,如果在后续的通电期间tw的开始之初使驱动信号的占空比从降低值dutylo增加而不使其降低到0%,则如上述那样转子从驱动转矩作用的状态开始旋转,能实现更顺畅的旋转。因此,实施方式2在转子的顺畅旋转方面是最好的,接着依次是实施方式1、图12的其它示例,在功耗方面则成为相反的顺序。标号说明
[0092]
2 无刷dc电动机3 油泵15 逆变器电路16u、16v、16w 线圈17 直流电源21u、21v、21w 霍尔传感器(相位角检测部)23 相位角检测部24 通电期间计算部25 驱动控制部uh、ul、vh、vl、wh、wl 开关元件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
