1.本实用新型涉及无人驾驶汽车技术领域,尤其涉及一种用于无人驾驶的导航定位装置。
背景技术:
2.无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的,无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车。
3.现有公开号为cn202120200593.1,名称为一种基于无人驾驶的导航定位装置,包括底座,所述底座的顶部开设有第一凹槽,所述第一凹槽的内壁左侧安装有第一丝杆和两个第一导向柱,所述第一丝杆的左端通过轴承与第一凹槽的内壁左侧连接,所述第一丝杆的右端贯穿底座的右侧并固定有第一转柄,所述第一丝杆的外侧安装有移动板,所述移动板的顶部开设有第二凹槽。
4.但是上述的导航定位装置,只能进行水平调整,不能根据需要进行使用角度和使用高度的调整,灵活性不好。
技术实现要素:
5.本实用新型的目的在于提供一种用于无人驾驶的导航定位装置,旨在改善上述的问题。
6.本实用新型是这样实现的:
7.一种用于无人驾驶的导航定位装置,包括平移组件和支撑组件,平移组件包括定位孔板,定位孔板的顶面上固定有轴承座,定位孔板的正上方竖直设置有支撑组件,支撑组件包括转盘和支框,转盘的正上方竖直设置有支框,支框的内部安装有导航定位装置本体。
8.进一步的,转盘的顶面上竖直固定有插框,插框中竖直插接有插块,插块的顶端固定在支框的底面上。
9.进而通过转盘的顶面上竖直固定有插框,插框中竖直插接有插块,插块的顶端固定在支框的底面上,从而竖直滑动插块在插框中的插入深度,完成使用高度的调节。
10.进一步的,插框的一侧竖直端面上部均水平贯穿固定有定位螺杆,插块竖直端面上沿竖直方向水平螺纹贯穿安装有多个定位螺孔,定位螺杆与定位螺孔螺纹贯穿连接。
11.进而通过插框的一侧竖直端面上部均水平贯穿固定有定位螺杆,插块竖直端面上沿竖直方向水平螺纹贯穿安装有多个定位螺孔,定位螺杆与定位螺孔螺纹贯穿连接,竖直滑动插块在插框中的插入深度,利用定位螺杆定位后,完成使用高度的调节。
12.进一步的,转盘上竖直螺纹贯穿安装有插接螺杆,转盘的底端通过轴承转动安装在轴承座上。
13.进而通过转盘上竖直螺纹贯穿安装有插接螺杆,转盘的底端通过轴承转动安装在轴承座上,转动支撑组件在定位孔板上,改变导航定位装置本体的使用角度,然后利用转盘
上的插接螺杆定位在定位孔板的插孔中,完成使用角度的调节。
14.进一步的,定位孔板的顶面上均匀开设有多个插孔,定位孔板上的插孔与插接螺杆竖直插接。
15.进而通过定位孔板的顶面上均匀开设有多个插孔,定位孔板上的插孔与插接螺杆竖直插接,用于限位角度。
16.进一步的,定位孔板的外圆周面的两侧均水平固定有套筒,套筒中水平套设有水平螺杆,水平螺杆的两端固定有连接板,水平螺杆上位于套筒的两端均螺纹安装有锁止螺筒。
17.进而通过定位孔板的外圆周面的两侧均水平固定有套筒,套筒中水平套设有水平螺杆,水平螺杆的两端固定有连接板,水平螺杆上位于套筒的两端均螺纹安装有锁止螺筒,从而方便后期水平移动使用位置,压持定位。
18.与现有技术相比,本实用新型的有益效果是:本实用新型在使用该用于无人驾驶的导航定位装置时,使用时通过转动支撑组件在定位孔板上,改变导航定位装置本体的使用角度,然后利用转盘上的插接螺杆定位在定位孔板的插孔中,完成使用角度的调节,同时竖直滑动插块在插框中的插入深度,利用定位螺杆定位后,完成使用高度的调节,提高使用的灵活性和调节的便捷性,从而克服了现有导航定位装置,只能进行水平调整,不能根据需要进行使用角度和使用高度的调整,灵活性不好的问题。
附图说明
19.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
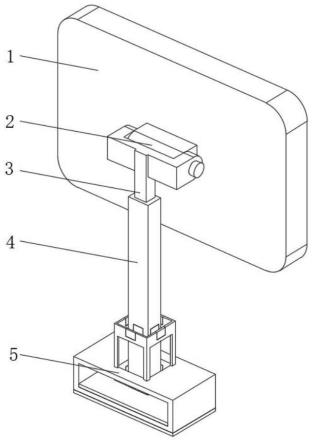
20.图1是本实用新型的整体结构示意图;
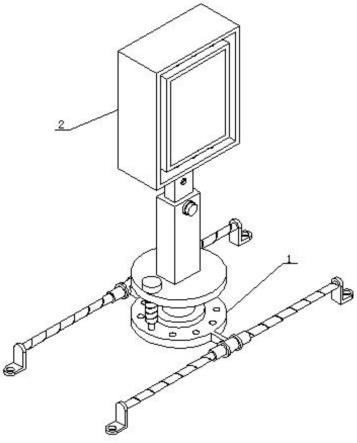
21.图2是本实用新型的分解结构示意图;
22.图3是本实用新型实施例中支撑组件的结构示意图;
23.图4是本实用新型实施例中平移组件的结构示意图。
24.图中:1、平移组件;11、定位孔板;12、轴承座;13、套筒;14、水平螺杆;15、锁止螺筒;2、支撑组件;21、转盘;211、插接螺杆;22、插框;221、定位螺杆;23、插块;231、定位螺孔;24、支框;25、导航定位装置本体。
具体实施方式
25.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳
动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
26.请参阅图1、图2、图3和图4所示,一种用于无人驾驶的导航定位装置,包括平移组件1和支撑组件2,平移组件1包括定位孔板11,定位孔板11的顶面上固定有轴承座12,定位孔板11的正上方竖直设置有支撑组件2,支撑组件2包括转盘21和支框24,转盘21的正上方竖直设置有支框24,支框24的内部安装有导航定位装置本体25。
27.进而通过在使用该用于无人驾驶的导航定位装置时,使用时通过转动支撑组件2在定位孔板11上,改变导航定位装置本体25的使用角度,然后利用转盘21上的插接螺杆211定位在定位孔板11的插孔中,完成使用角度的调节,同时竖直滑动插块23在插框22中的插入深度,利用定位螺杆221定位后,完成使用高度的调节,提高使用的灵活性和调节的便捷性。
28.请参阅图3,转盘21的顶面上竖直固定有插框22,插框22中竖直插接有插块23,插块23的顶端固定在支框24的底面上。
29.进而通过转盘21的顶面上竖直固定有插框22,插框22中竖直插接有插块23,插块23的顶端固定在支框24的底面上,从而竖直滑动插块23在插框22中的插入深度,完成使用高度的调节。
30.请参阅图3,插框22的一侧竖直端面上部均水平贯穿固定有定位螺杆221,插块23竖直端面上沿竖直方向水平螺纹贯穿安装有多个定位螺孔231,定位螺杆221与定位螺孔231螺纹贯穿连接。
31.进而通过插框22的一侧竖直端面上部均水平贯穿固定有定位螺杆221,插块23竖直端面上沿竖直方向水平螺纹贯穿安装有多个定位螺孔231,定位螺杆221与定位螺孔231螺纹贯穿连接,竖直滑动插块23在插框22中的插入深度,利用定位螺杆221定位后,完成使用高度的调节。
32.请参阅图3,转盘21上竖直螺纹贯穿安装有插接螺杆211,转盘21的底端通过轴承转动安装在轴承座12上。
33.进而通过转盘21上竖直螺纹贯穿安装有插接螺杆211,转盘21的底端通过轴承转动安装在轴承座12上,转动支撑组件2在定位孔板11上,改变导航定位装置本体25的使用角度,然后利用转盘21上的插接螺杆211定位在定位孔板11的插孔中,完成使用角度的调节。
34.请参阅图4,定位孔板11的顶面上均匀开设有多个插孔,定位孔板11上的插孔与插接螺杆211竖直插接。
35.进而通过定位孔板11的顶面上均匀开设有多个插孔,定位孔板11上的插孔与插接螺杆211竖直插接,用于限位角度。
36.请参阅图4,定位孔板11的外圆周面的两侧均水平固定有套筒13,套筒13中水平套设有水平螺杆14,水平螺杆14的两端固定有连接板,水平螺杆14上位于套筒13的两端均螺纹安装有锁止螺筒15。
37.进而通过定位孔板11的外圆周面的两侧均水平固定有套筒13,套筒13中水平套设有水平螺杆14,水平螺杆14的两端固定有连接板,水平螺杆14上位于套筒13的两端均螺纹安装有锁止螺筒15,从而方便后期水平移动使用位置,压持定位。
38.工作原理:在使用该用于无人驾驶的导航定位装置时,使用时通过转动支撑组件2在定位孔板11上,改变导航定位装置本体25的使用角度,然后利用转盘21上的插接螺杆211
定位在定位孔板11的插孔中,完成使用角度的调节,同时竖直滑动插块23在插框22中的插入深度,利用定位螺杆221定位后,完成使用高度的调节。
39.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。