1.本发明属于激光器光谱特性测量领域,具体涉及一种基于偏振光纤干涉仪的激光器波长实时监测方法。
背景技术:
2.波长作为测量基准值被广泛应用于长度、速度、角度、平面度、直线度和垂直度的测量,是精密计量、精密机械和微电子工业领域重要的测量参数,精确地测量波长和稳定性是保证测量准确性和量值溯源的关键。随着激光在工业加工、通信、测量以及医疗、科研等领域的广泛应用,方便快捷地测量激光波长也正成为一种迫切的需求。
3.波长监测对于光纤通信领域是十分重要的。随着信息化的发展,通信容量需求不断增大,在密集波分复用系统中,信道数目日益增多,信道间隔减小,波长切换会导致波长震荡,从而引起不同信道间的串扰,影响光网络信号的传输。为了解决上述问题,就需要精密的波长锁定技术。要实现精密的锁定,就必须精确监测激光波长的漂移。在大容量、高速率的光纤通信系统中,为了增强光网络的灵活性,要求波长能在工作中有规律地变化,因此需要激光器提供动态波长,以便将一个波长从一个网络段中加入或提出,以适应所要求的变化的容量。因此,动态波长监测是提供精准波长信息的前提。
4.choi等人在《construction ofa michelson-type wavemeter and evaluation of its performances》中研究了基于迈克尔逊干涉仪的波长测量方法,这种波长测量系统需要长位移的扫描,使得系统对机械振动和激光束的对准精度非常敏感。muntean k在《laser wavelength comparison optimization problem.in:proceedings ofthe 2ndinternational workshop on laser and fiber-optical networks modeling》中研究了基于斐索干涉仪的波长测量方法,这种装置通过测量参考激光和测试激光的干涉条纹周期来获取波长变化,但在长腔长干涉测量中无法满足波长监测需求。marek dobosz等人在《overview ofthe laser-wavelength measurement methods》中研究了基于光拍频的波长测量方法,这种方法测量精度高,速度快,但是受到所测激光的相干性和高昂成本的限制。
技术实现要素:
5.本发明提出了一种基于偏振光纤干涉仪的激光器波长实时监测方法,通过偏振光纤干涉仪引入同步移相,解决了波长实时监测问题。相比于利用光程差扫描的迈克尔逊型波长测量法和采用探测器扫描数千个像素的菲索干涉仪型波长测量法,本发明只需一个四象限探测器获得四个像素的光强信息就能反馈得到波长变化量,既避免了长位移带来的误差问题,又降低了成本,实现了对激光器高精度的实时波长监测。
6.实现本发明的技术解决方案为:一种基于偏振光纤干涉仪的激光器波长实时监测方法,其特征在于,步骤如下:
7.步骤1、激光器输出端接有保偏光纤,激光器产生待测激光。
8.步骤2、保偏光纤另一端与偏振光纤干涉仪系统连接,待测激光进入偏振光纤干涉
仪系统输出携带波长信息的正交偏振的参考光及延时光。
9.步骤3、利用空间移相系统对正交偏振的参考光及延时光进行同步分光移相,得到移相量为0
°
、90
°
、180
°
、270
°
的空间移相干涉信号,实现相位延迟ψ(t)的实时调制。
10.步骤4、通过四步移相算法解调干涉信号得到相位信息和波长信息,实现对激光器波长的实时监测,具体如下:
11.步骤4-1、采集移相为0
°
、90
°
、180
°
、270
°
的四路干涉信号i1,i2,i3,i4。
12.步骤4-2、通过四步移相算法解调干涉信号,得到待测相位ψ(t):
[0013][0014]
步骤4-3、对待测相位ψ(t)进行解包,将多个截断相位的区域拼接展开成连续相位,以恢复其真实相位。
[0015]
步骤4-4、将解包后的相位转化为波长变化δλ(t),实现对激光器波长的实时监测:
[0016]
当光纤折射率n、保偏延时光纤的长度l已知时,待测相位ψ(t)的变化反映了激光器波长λ(t)的演变特性,表示为:
[0017][0018]
通过公式(4),得到相位变化和波长变化的关系,表示为:
[0019][0020]
其中δλ(t)为激光器的波长变化,λ为激光器中心波长,δψ(t)为激光器的相位变化。
[0021]
本发明与现有技术相比,其显著优点在于:
[0022]
(1)采用偏振同步移相法获取四路干涉信号,通过四步移相法解调出相位信息,同步移相法具有测量速度快和测量精度高的特点,四步移相法具有算法复杂度低的特点,能实现相位信息的快速解调。
[0023]
(2)不同于基于光拍频现象的波长监测方法,本发明在降低成本的同时拥有更高的测量精度和更快的采样速率,其采样速率仅受限于四象限探测器和数据采集器的带宽,能够实现激光器的高精度、实时波长测量。
[0024]
(3)空间移相光路中,偏振光纤干涉仪出来的光经过准直透镜和1/4波片直接打到四象限探测器的正中央。整个结构仅有准直透镜、1/4波片、四象限光阑、四象限偏振片、四象限探测器等器件,具有结构简单、便于集成、插入损耗低等优点。四象限分光方案在保证四个象限探测器增益、偏置系数一致的同时大大提高了光能利用率。
附图说明
[0025]
图1为本发明的基于偏振光纤干涉仪的激光器波长监测方法流程图。
[0026]
图2为本发明的基于偏振光纤干涉仪的激光器波长监测方法实现装置结构示意图。
[0027]
图3为光纤偏振分束器的结构图。
[0028]
图4为光纤偏振合束器的结构图。
[0029]
图5(a)为四象限光阑的结构图。
[0030]
图5(b)为四象限偏振片的结构图。
[0031]
图6为本发明实例中加信号发生器调制后由四象限探测器采集的光强信号,其中图(a)为归一化前的四路光强信号图,图(b)为归一化后的四路光强信号图,图(c)为解包前后的相位变化图及对解包后相位的余弦拟合图。
[0032]
图7为本发明实例中调节激光器电压由0v到100v变化时采集到的波长变化以及光谱仪测试的波长变化图。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0035]
另外,在本发明中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明地描述中,“多个”地含义是至少两个,例如两个、三个等,除非另有明确具体地限定。
[0036]
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应作广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;“连接”可以是机械连接,也可以是电连接。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0037]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围指内。
[0038]
下面将结合本设计实例对具体实施方式、以及本次发明的技术难点、发明点进行进一步介绍。
[0039]
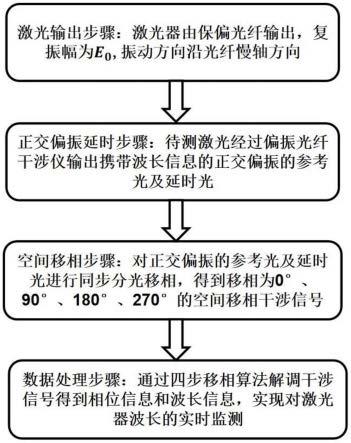
结合图1,一种基于偏振光纤干涉仪的激光器波长实时监测方法,步骤如下:
[0040]
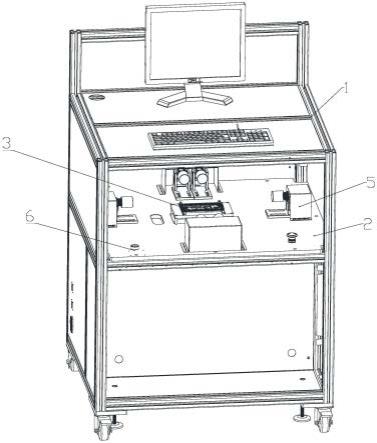
步骤1、激光器1产生待测激光:
[0041]
结合图2,激光器1的输出端接有保偏光纤2,偏振方向沿光纤慢轴,保偏光纤2输出的待测激光复振幅为e0(t)。
[0042]
步骤2、待测激光经过偏振光纤干涉仪系统3输出携带波长信息的正交偏振的参考光及延时光。
[0043]
结合图2,保偏光纤2的输出端与偏振光纤干涉仪系统3连接,由偏振光纤干涉仪系统3输出偏振方向互相正交参考光和延时光,参考光和延时光的相位差携带了待测激光的波长信息。
[0044]
所述偏振光纤干涉仪系统3沿光路依次包括光纤偏振分束器4、保偏延时光纤5、光
纤偏振合束器6和温控模块7。
[0045]
结合图3,上述光纤偏振分束器4包括公共端输入保偏光纤8、公共端准直透镜9、分束器偏振立方棱镜10、p端耦合透镜11、p光输出端保偏光纤12、s端耦合透镜13和s光输出端保偏光纤14。定义分束器偏振分光棱镜10透射光和反射光构成的平面为第一工作面。
[0046]
共第一光轴依次设置公共端准直透镜9、分束器偏振立方棱镜10、p端耦合透镜11,s端耦合透镜13设置在分束器偏振立方棱镜10的反射光路上。公共端输入保偏光纤8的输入端与保偏光纤2的输出端熔接,p光输出端保偏光纤12的输出端与保偏延时光纤5的输入端熔接,s光输出端保偏光纤14的输出端与s光输入端保偏光纤17的输入端熔接。
[0047]
待测激光器1产生的光经过保偏光纤2进入公共端输入保偏光纤8中,公共端输入保偏光纤8输出的光经过公共端准直透镜9准直后,进入分束器偏振立方棱镜10分为两路,一路作为参考光(s光),一路作为延时光(p光)。延时光经过p端耦合透镜11和p光输出端保偏光纤12后与保偏延时光纤5熔接,参考光经过s端耦合透镜13和s光输出端保偏光纤14与s光输入端保偏光纤17熔接。
[0048]
公共端输入保偏光纤8的慢轴方向与第一工作面成45度或-45度,待测激光经公共端输入保偏光纤8输出,经公共端准直透镜9准直后,由分束器偏振分光棱镜10分为两束光,一束为透射形成的振动方向与第一工作面平行的p光,另一束为反射形成的振动方向与第一工作面垂直的s光;p光经过p端耦合透镜11耦合进入p光输出端保偏光纤12,p光输出端保偏光纤12慢轴与第一工作面成0度对准,从而实现p光的偏振保持;s光经过s端耦合透镜13耦合进入s光输出端保偏光纤14,s光输出端保偏光纤14慢轴与第一工作面成0度对准,从而实现s光的偏振保持。s光输出端保偏光纤14的输出端和保偏延时光纤5的输出端分别接入光纤偏振合束器6。
[0049]
结合图4,上述光纤偏振合束器6包括p光输入端保偏光纤15、p端准直透镜16、s光输入端保偏光纤17、s端准直透镜18、合束器偏振立方棱镜19、公共端耦合透镜20及公共端输出保偏光纤21。定义合束器偏振分光棱镜19透射光和反射光构成的平面为第二工作面。
[0050]
共第一光轴依次设置p端准直透镜16、合束器偏振立方棱镜19、公共端耦合透镜20,s端准直透镜18设置在合束器偏振立方棱镜19的另一入射光路上。延时光路中保偏延时光纤5的输出端与p光输入端保偏光纤15的输入端熔接,参考光路中s光输出端保偏光纤14的输出端与s光输入端保偏光纤17的输出端熔接。p光输入端保偏光纤15的输出光经过p端准直透镜16打到合束器偏振立方棱镜19上,s光输入端保偏光纤17的输出光经过s端准直透镜18打到合束器偏振立方棱镜19上。参考光路与测试光路经过合束器偏振立方棱镜19和公共端耦合透镜20后合成偏振态正交的参考光与延时光,由公共端输出保偏光纤21输出,公共端输出保偏光纤21与空间移相系统27中的光纤连接器28相连。
[0051]
p光输入端保偏光纤15的慢轴与第二工作面成0度,p光输入端保偏光纤15将振动方向沿慢轴方向的偏振光经p端准直透镜16形成平行于第二工作面振动的p准直光;s光输入端保偏光纤17慢轴与第二工作面成90度,s光输入端保偏光纤17将振动方向沿慢轴方向的偏振光经s端准直透镜18形成垂直于第二工作面振动的s准直光。p准直光和s准直光经过合束器偏振立方棱镜19合成为传输方向一致的偏振态互相正交光,经过公共端耦合透镜20耦合至公共端输出保偏光纤21,公共端输出保偏光纤21的慢轴方向与第二工作面成0度或者90度,实现偏振态互相正交光的偏振态保持。
[0052]
参考光和延时光的合成琼斯矢量e
in
(t)表示为[m e
jψ(t)
]
t
e0(t),其中m为参考光路与延时光路的强度比,j为虚数,干涉臂光程差引入的相位延迟ψ(t)=2πnl/λ(t),l为保偏延时光纤5的长度,n为光纤折射率,λ(t)为待测激光器的波长,t表示转置。
[0053]
温控模块7包括金属热层22、温度传感器23、半导体制冷器24、散热器25、温控器26。所述光纤偏振分束器4、保偏延时光纤5及光纤偏振合束器6均固定在金属热层22的上表面,并由硅胶密封。散热器25固定在半导体制冷器24的下表面进行散热,半导体制冷器24固定在金属热层22的下表面进行温度控制,温度传感器23置于金属热层22的上表面进行温度监测。温度传感器23将金属热层22上的温度信号反馈至温控器26,信号温控器26跟据温度信号控制半导体制冷器24电流的正负及大小,形成温控负反馈回路,稳定金属热层22及光纤偏振分束器4、保偏延时光纤5及光纤偏振合束器6的温度。
[0054]
所述偏振光纤干涉仪系统3采用保偏光纤及器件,解决了普通光纤干涉仪中干涉光偏振方向不稳定引起的振幅抖动问题,同时为空间移相系统27提供偏振方向互相正交的干涉光用于波长信息的同步移相解调。
[0055]
步骤3、利用空间移相系统27对正交偏振的参考光及延时光进行同步分光移相,得到移相量为0
°
、90
°
、180
°
、270
°
的空间移相干涉信号,实现相位延迟ψ(t)的实时调制。
[0056]
激光器1经偏振光纤干涉仪3产生偏振态互相正交的参考光及延时光e
in
(t),经过空间移相系统27进行移相,得到四路移相为0
°
、90
°
、180
°
、270
°
的干涉信号。
[0057]
所述空间移相系统27包括沿光路依次设置光纤连接器28、准直透镜29、1/4波片30、四象限光阑31、四象限偏振片32、四象限探测器33。偏振光纤干涉仪系统3输出的公共端输出保偏光纤21与空间移相系统27的光纤连接器28连接。
[0058]
结合图5(a)和图5(b),四象限光阑31和四象限偏振片32的具体结构如图所示。四象限光阑31在现有光阑透光孔上加十字挡板制成,透过光阑的四路光分别与四象限偏振片32的四个象限一一对应。四象限光阑31将参考光和延时光同时被分成四个象限,提前缩小光束尺寸,限制衍射发生的串扰,让光信号被四象限偏振片32的各个象限接收。四象限偏振片32的四个象限透光轴方位角分别为0
°
、45
°
、90
°
、135
°
。
[0059]
定义光纤连接器28位置偏振光纤干涉仪系统3输出公共端输出保偏光纤21的慢轴所在平面定义为第三工作面。公共端输出保偏光纤21输出光经准直透镜29形成正交偏振的准直参考光及延时光,经快轴方向与第三工作面成45度的1/4波片30后形成共光路传输的左旋圆偏振的参考光和右旋圆偏振的延时光,其琼斯矢量e
out1
(t)=g
λ/4ein
(t),其中g
λ/4
为1/4波片30的琼斯矩阵。
[0060]
经过四象限光阑31后,参考光和延时光同时被分成四个象限,经过四象限偏振片32后形成四个不同偏振方向的参考光和测试光。四象限偏振片32由透光轴与x轴夹角为θk的四个偏振片构成,偏振片序号k=1,2,3,4。正交偏振的参考光及延时光通过1/4波片30及四象限偏振片32,并由四象限探测器33的四个象限接收。四个象限接收光的琼斯矢量ek(t)表示为:
[0061]
[0062]
其中,四象限偏振片32的琼斯矢量为
[0063]
四象限探测器33记录的干涉信号强度ik(t)表示为:
[0064]
ik(t)=|ek(t)|2=u(t)
·
{1 y
·
sin[ψ(t) 26k]}
ꢀꢀ
(2)
[0065]
其中u(t)=|e0(t)|2为干涉信号的背景分量,为干涉信号的对比度。四象限偏振片32由透光轴与x轴夹角θk在k=1,2,3,4时依次为0
°
、45
°
、90
°
、135
°
。因此携带激光器波长信息的延迟量ψ(t)调制为可以实时同步采集的相移量为2θk的移相干涉信号。采集的干涉信号相移量分别为0
°
、90
°
、180
°
、270
°
。
[0066]
步骤4、通过四步移相算法解调干涉信号得到相位信息和波长信息,实现对激光器波长的实时监测。步骤4的流程如图6所示,具体如下:
[0067]
步骤4-1、采集移相为0
°
、90
°
、180
°
、270
°
的四路干涉信号i1,i2,i3,i4。
[0068]
步骤4-2、用四步移相算法解调干涉信号得到待测相位ψ(t):
[0069][0070]
步骤4-3、四步移相算法计算出来的相位值均是以反正切函数的形式表示,即得到的相位分布被截断成为多个2π范围内变化的区域,形成包裹相位。对相位进行解包,将多个截断相位的区域拼接展开成连续相位,以恢复其真实相位。
[0071]
步骤4-4、将解包后的相位转化为波长变化δλ(t),实现对激光器波长的实时监测。当n、l已知时,待测相位ψ(t)的变化反映了激光器波长λ(t)的演变特性,表示为:
[0072][0073]
通过公式(4)可以得到相位变化和波长变化的关系,表示为:
[0074][0075]
其中δλ(t)为激光器的波长变化,λ为激光器中心波长,δψ(t)为激光器的相位变化。
[0076]
本发明使用四象限调制解调法获取携带激光波长信息的相位信号,从而监测激光器波长演变。该调制解调方法是一种空间移相解调技术,能在保障移相法解调精度的前提下,有效提高波长监测的时间分辨率。此外,使用四象限调制法有效保障了系统的光能利用率,降低了测试光的插入损耗。基于偏振光纤干涉仪的激光器波长实时监测装置通过偏振光纤干涉仪引入同步移相,解决了现有激光器波长监测方法中对机械振动和激光束对准精度非常敏感的问题,避免了系统需要长位移扫描带来的误差问题。所述偏振光纤干涉仪系统3采用保偏光纤及器件,解决了普通光纤干涉仪中干涉光偏振方向不稳定引起的振幅抖动问题,同时为空间移相系统27提供偏振方向互相正交的干涉光用于波长信息的同步移相解调。基于偏振光纤干涉仪的激光器波长实时监测方法可以应用于测量激光器长时间出光的波长稳定性,观测一定时间内激光器波长的微小变化,与市面上常用波长计相比具有时间分辨率高的优点。
[0077]
实施例1
[0078]
结合图2,基于littman光路的激光器1(newfocus tlb7000)作为测试光源,激光器1中心波长为635nm,由单模保偏光纤(nufern pm-630hp,慢轴对准)输出,光纤输出功率约1mw,偏振消光比约为70:1。该光源由光纤耦合接入光纤偏振分束器4,并由光纤偏振分束器4分为两路。光纤偏振分束器4的3端口连接激光器1,2端口通过保偏延时光纤5连接光纤偏振合束器6的2端口形成参考光路,光纤偏振分束器4的1端口连接光纤偏振合束器6的1端口形成延时光路。光纤偏振分束器4和光纤偏振合束器6均采用全光纤器件,三个端口均为光纤输出。本实施例采用的测试光纤为nufern公司生产的pm-630hp光纤(直径为4.5μm,数值孔径na=0.12),采用保偏光纤确保了光传播过程中偏振态不变。参考光路和延时光路经光纤偏振合束器6后汇合,形成正交偏振的参考光及延时光,经过准直透镜29进行准直,之后经过1/4波片30形成不同旋向的圆偏光,再通过四象限光阑31进行滤光,经过四象限偏振片32后形成移相的干涉光强分布,并由四象限探测器33记录。其中,通过调节1/4波片30与透光轴的角度确保经过四象限偏振片32后的相位为0
°
、90
°
、180
°
、270
°
,进而通过四步移相法解调出相位信息。
[0079]
偏振光纤干涉仪3主要由光纤器件和保偏光纤等构成,光纤偏振合束器6(mc light,mcpbc-630)同样由自由空间的光纤偏振分束器4与pm-630hp光纤耦合制成,输出光纤慢轴与自由空间合束器透射光的振动方向成0
°
。光纤偏振分束器4与光纤偏振合束器6的插入损耗可控制在0.8db左右,有效保障了系统的光能利用效率。保偏延时光纤5也采用nufern的pm-630hp光纤,光纤长度为1.9m。保偏光纤和光纤器件采用熔接方式连接,并安装在一块具有隔震垫和隔热泡沫的铜盘上,通过温控模块7对铜盘进行温度控制,温控模块7采用tcm-x107温控器,以抑制环境振动和温度对相位延迟量的影响。
[0080]
空间移相系统主要由焦距为60mm的准直透镜29及低级次1/4波片30构成(晶达光电,qwp-633,4级),四象限光阑31,四象限偏振片32(苏州光宇,薄片组合型)以及四象限探测器33(上海欧光,osq50-it,带宽200khz)构成。四象限探测器33采集的干涉信号由采样频率250khz的数据采集卡(usb3202n)采集,并由个人计算机记录。
[0081]
设置激光器1控制器输出频率为0.1hz,均值为30v,幅度为10mv的正弦电压信号,驱动激光器1的压电陶瓷,使得激光器波长以大约0.7pm的幅度正弦变化。图6(a)为激光器波长调谐过程中四象限探测器33接收到的时变光强信号。四象限偏振器33四个偏振片的透光轴方向存在约45
°
角度间隔,因此干涉光强信号存在明显相移。受到光斑对准误差、四象限探测器33一致性、四象限偏振片32方位角误差等因素的影响,四路干涉光强信号存在明显的背景及对比度差异。激光器热平衡后,式(2)中u(t)可看做时间无关。因此可依据图6(a)中各干涉信号的最大最小值归一化。图6(b)为归一化后的移相干涉信号,各组信号中的多个干涉峰/谷基本一致。根据式(3)可求得相位随时间变化,如图6(c)中红色实线所示。由于反正切函数缘故,该曲线所示相位值被包裹在-π到π范围内。图6(c)中绿色实线为解包裹后的相位分布,该曲线与拟合余弦曲线(图中虚线)完全重合。测得激光器的相对波长变化范围为0.71pm,余弦信号的周期约0.1hz,与激光控制器的设置一致,表明基于偏振光纤干涉仪的激光器波长实时监测装置能正确反映激光器的相对波长变化。
[0082]
图7为本发明实例中调节激光器1电压由0v到100v变化时采集到的波长变化以及光谱仪测试的波长变化图。通过控制电压源给激光器施加0v到100v的电压,图中点线为光谱仪测试的激光器在不同电压下的波长。设置上升间隔为0.04v,时间间隔为200ms,从0v到
100v移相需要500s。图中直线为施加0.04v的步进电压情况下500s内从0v到100v移相时的波长变化,虚线为直线拟合结果。施加步进电压移相时波长变化线性度较好且与光谱仪测试的波长数据吻合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。