1.本发明涉及控制环路收敛,尤其涉及一种用于使用动态步长大小或可变计数器大小来增加用于控制环路收敛的速率的系统和方法。
背景技术:
2.作为远程位置之间的通信的一部分,需要在信号通过信道之后处理接收信号,以将接收信号转换为数据或其他有用的形式。如所理解的,无论信号是光信号还是电信号,通过信道能够使信号劣化并使其失去功率。然而,通信系统中的其他组件需要指定且已知功率电平的信号用于下游处理。这在接收和处理接收信号时提出了若干挑战。
3.一个这样的挑战是接收信号的功率电平可能是高度可变的。例如,如果信道较差或长度较长,或者如果信号以低功率电平发送,则接收信号幅度将较小。可替代地,信道可以是短的、高质量的,或者可以以高功率电平发送信号,在这种情况下,接收信号的幅度将是高的。当然,也可以接收高和低之间的任何范围的接收信号幅度,并且这可以根据任何数量的不同因素而随时间变化,包括但不限于信道的变化、电源电压变化、安装(连接到不同信道)的变化或许多其他因素。不管接收信号的功率如何,期望将优选功率电平(幅度)的信号呈现给下游处理元件。
技术实现要素:
4.为了克服现有技术的缺点并提供额外的益处,公开了一种用于控制自动增益控制系统的收敛的方法。该示例方法利用可变增益放大器(vga,variable gain amplifier)调节输入信号的幅度以生成vga输出信号。在该实施例中,幅度调节基于提供给vga的控制向量而发生。该方法还包括用检测器处理vga输出信号,以确定vga输出信号的幅度值,并将幅度值与目标值进行比较。
5.响应于该比较,该方法确定幅度值是否小于目标值。如果是,则该方法相对于目标值评估幅度值,以确定幅度值和目标值之间的差。此后,该方法基于相对于目标值评估幅度值来将控制向量减少第一量、第二量或直接减少到最小控制向量的量。可替代地,响应于所述比较确定幅度值大于目标值,相对于目标值评估幅度值,以确定幅度值与目标值之间的差。此后,基于相对于目标值评估幅度值,将控制向量增加第一量、第二量或直接增加到最大控制向量的量。
6.在一个实施例中,第一量是单个步长的步长大小,并且第二量是大于单个步长的步长大小。在一种配置中,幅度值是vga输出信号的峰值。该方法还可以包括将控制向量转换为模拟控制信号,使得模拟控制信号是用于控制vga增益的控制信号。
7.还公开了一种用于控制可变增益放大器的增益的系统,该系统包括被配置为确定可变增益放大器输出的幅度值的检测器模块。此外,该实施例的一部分是比较器模块,其被配置为将幅度值与目标值进行比较,并且响应于该比较,生成up_dn信号。数字控制模块被配置为接收up_dn信号并处理up_dn信号以生成控制向量。一个或多个数模转换器被配置为
将控制向量转换为模拟控制信号,使得模拟控制信号控制可变增益放大器的增益。
8.在一个实施例中,比较器模块由三个比较器组成。所述检测器模块可以被配置为峰值检测器,所述峰值检测器被配置为检测可变增益放大器输出的峰值。在一种配置中,数字控制模块包括控制逻辑、用户接口、存储器或寄存器以及一个或多个比较器。可以设想,数字控制模块可以被配置为相对于阈值评估up_dn信号,并且响应于评估将控制向量增加或减少步长最大值或者将控制向量向上或向下调节小步长大小。在另一变型中,数字控制模块评估up_dn信号的过去值以调节步长大小值,使得步长大小信号控制控制向量的变化率,并且基于up_dn信号将控制向量增加或减少步长大小值。
9.还公开了一种用于基于控制向量值来控制可变增益放大器的增益的方法,所述方法包括:监测可变增益放大器输出信号以产生监测信号,并且将监测信号与目标值进行比较以产生up_dn值,所述up_dn值指示监测信号是大于还是小于目标值。然后,针对up_dn值在预定数量的up_time值上的变化来评估up_dn值。响应于up_dn值在预定数量的up_time值上的变化,减少步长大小值。响应于up_dn值在预定数量的up_dn值上的零变化或小于一定数量的变化,增加步长大小值。然后,如果监测信号大于目标值,则将控制向量值增加步长大小值,或者如果监测信号大于目标值,则将控制向量值增加步长大小值?此后,基于控制向量值来调节可变增益放大器的增益。在该实施例中,减少控制向量值增加增益,并且增加控制向量值减少增益。然而,在其他实施例中,可以在控制向量值和增益之间建立其他关系,因此权利要求和公开不限于特定的设置关系。
10.在一个实施例中,该方法还包括将控制向量值转换为模拟控制信号,并将模拟控制信号提供给可变增益放大器。监测可变增益放大器输出信号的步骤可以包括确定可变增益放大器输出信号的峰值。在一种配置中,up_dn信号是指示可变增益放大器输出信号小于目标值的逻辑“0”值或指示可变增益放大器输出信号大于目标值的逻辑“1”值。步长大小值具有确定控制向量值的最大变化率的最大值。在一个示例实施例中,up_dn值的预定数量是十,减少步长大小值将步长大小值减少一半,并且增加步长大小值使步长大小值加倍。
11.还公开了一种用于控制自动增益控制单元的收敛的方法,包括接收输入信号并基于控制向量用可变增益放大器(vga)调节输入信号的峰到峰幅度。在该方法中,vga生成vga输出信号。然后,用峰值检测器处理vga输出信号以确定vga输出信号的峰值,并将该峰值与目标值进行比较。响应于比较,确定峰值是否大于或小于目标值,并且响应于比较,确定峰值是否小于目标值,然后执行以下操作。将峰值与目标值进行比较以确定峰值是否比目标值小阈值,响应于峰值没有比目标值大阈值,确定控制向量是否处于最小值。响应于控制向量处于最小值,则不改变控制向量。可替代地,响应于控制向量不处于最小值,将控制向量减少第一量。
12.阈值由模拟电路控制,而不是在数字控制下。在一个实施例中,阈值是可编程的,但是在其他实施例中,值是固定的。当输出信号幅度明显错误时,阈值应该被编程为断言up_max和dn_max。当控制向量应显著增加时,应断言“up_max”。当控制向量应显著减少时,应断言“dn_max”。
13.该方法还包括:响应于比较,确定峰值是否比目标值大阈值,确定控制向量是否在最小控制向量值的步长最大值内。响应于控制向量在最小控制向量值的步长最大值内,将控制向量减少到最小控制向量值。否则,响应于控制向量距离最小控制向量值大于步长最
大值,将控制向量减少步长最大值。
14.在该方法中,响应于比较,确定峰值是否大于目标值,将峰值与目标值进行比较以确定峰值是否比目标值小第二阈值。并且,响应于峰值没有比目标值大第二阈值,确定控制向量是否处于最大值。响应于控制向量处于最小值,不改变控制向量,并且响应于控制向量不小于最大值,将控制向量增加第一量。
15.该方法还包括:响应于比较,确定峰值是否比目标值大第二阈值,确定控制向量是否在最大控制向量值的步长最大值内。然后,响应于控制向量在最大控制向量值的步长最大值内,将控制向量增加到最大控制向量值,或者响应于控制向量距离最大控制向量值大于步长最大值,将控制向量增加步长最大值。
16.在一个实施例中,第二量大于两个步长。在一种配置中,控制向量控制vga的增益。步长最大值是控制向量一次能够改变的最大量。
17.为了克服现有技术的缺点,公开了一种用于控制可变放大器的增益的系统。在一个实施例中,该系统包括误差检测器,其被配置为将放大器输出与参考值进行比较,并且响应于此,输出误差信号。此外,该系统的一部分是计数器,其具有计数器大小,被配置为保持反映误差检测器随时间输出的计数器值,并且响应于计数器值达到计数器大小,输出增益控制信号。误差检测器信号监测器被配置为随时间跟踪误差检测器信号,并且响应于误差检测器信号满足预定模式,向计数器提供计数器大小控制信号以减少计数器大小,这减少了放大器输出达到参考值所需的时间。
18.在一个实施例中,参考值包括预期或期望的放大器输出幅度(峰值、平均值或其他指定)。该系统还可以包括环路状态机和数模转换器,使得环路状态机被配置为将增益控制信号转换为数字增益控制值,其中,所述数字增益控制值被提供给数模转换器,所述数模转换器将数字增益控制值转换为模拟增益控制信号,所述模拟增益控制信号被提供给可变放大器。在一种配置中,其中,误差检测器信号监测器响应于误差检测器信号不满足预定模式而被配置成增加计数器大小。增加计数器大小的步骤可以包括将计数器大小重置为最大计数器大小。
19.还公开了一种用于控制可变增益放大器的增益的方法。在一个实施例中,该方法包括将可变增益放大器输出信号与参考值进行比较,以确定可变增益放大器输出信号是大于还是小于参考值。然后,响应于可变增益放大器输出信号大于参考值,生成向上信号。响应于可变增益放大器输出信号小于参考值,生成向下信号,并且响应于向上信号和向下信号更新计数器。该操作方法跟踪与预定模式相关的向上信号和向下信号的数量。响应于计数器达到最大计数器值或最小计数器值,输出计数器输出信号以调节可变增益放大器的增益。响应于与预定模式相关的向上信号和向下信号的数量满足所述预定模式,改变计数器的大小。
20.在一个实施例中,参考值包括预期或期望的放大器输出幅度(峰值、平均值或其他指定)。该方法还可以包括响应于向上信号和向下信号更新计数器。跟踪步骤可以包括与向上信号和向下信号的预定或预定义模式相比,保持向上信号和/或向下信号的运行总模式或先前模式。计数器大小是在计数器生成输出并重置之前必须达到的计数器值。
21.该模式可以是预定连续数量的向上信号或预定连续数量的向下信号。在另一个实施例中,模式是关于预定数量的向上信号和向下信号的预定数量的向上信号或预定连续数
量的向下信号。该方法还可以包括:响应于计数器值达到计数器大小值或预定计数器最小值,将计数器重置为计数器中点值。
22.还公开了一种用于控制控制环路到参考值的收敛的系统,该系统包括在控制环路的控制下被配置为生成输出信号的设备,以及比较器,该比较器被配置为:将输出信号与参考值进行比较,响应于输出信号小于参考值,输出向上信号,以及响应于输出信号大于参考值,输出向下信号。此外,该系统的一部分是具有定义计数器最大值和计数器最小值的计数器大小的计数器。所述计数器被配置为保持计数器值,所述计数器值响应于向上信号而递增并且响应于向下信号而递减,使得所述计数器输出增益控制值。向上/向下信号跟踪器被提供并被配置为跟踪向上信号和向下信号的模式并将该模式与一个或多个预定模式进行比较,并且响应于向上信号和向下信号与一个或多个预定模式中的一个匹配,改变计数器大小。
23.在一个实施例中,向上/向下信号跟踪器包括存储器和一个或多个比较器。可以预期,改变计数器大小可以包括向计数器发送控制信号以减少计数器的大小。在控制环路的控制下的设备可以是可变增益放大器。该系统还可以包括环路状态机,该环路状态机被配置为响应于来自计数器的增益控制值,增加或减少表示增益控制信号的数字值。该系统还可以包括:响应于向上信号和向下信号与一个或多个预定模式中的一个不匹配,增加计数器大小。
24.通过研究以下附图和详细描述,本发明的其他系统、方法、特征和优点对于本领域技术人员将是或将变得清楚。所有这样的附加系统、方法、特征和优点旨在包括在本说明书内、在本发明的范围内,并且由所附权利要求保护。
附图说明
25.附图中的组件不一定按比例绘制,而是将重点放在说明本发明的原理上。在附图中,相同的附图标记在不同视图中表示对应的部分。
26.图1示出了示例性光纤通信链路。
27.图2a示出了示例性可变增益放大器控制系统的框图。
28.图2b示出了示例性数字控制单元的框图。
29.图3示出了用于控制向量调节的现有技术方法。
30.图4是调节控制向量的现有技术过程的更详细版本。
31.图5示出了图4的方法的控制向量值对时间的示例曲线图。
32.图6示出了vga控制方法的操作流程图。
33.图7示出了图6的方法的控制向量值随时间的曲线图。
34.图8a是示出图8b和图8c的关系的索引图。
35.图8b示出了控制向量调节的替代方法的操作流程图的第一部分。
36.图8c示出了图8b所示的控制向量调节的替代方法的操作流程图的第二部分。
37.图9示出了基于图8b和图8c的方法的控制向量调节的示例曲线图。
38.图10示出了具有可调节计数器大小的示例性系统的框图。
39.图11示出了母案申请中描述的动态步长大小的曲线图。
40.图12示出了基于图10所示系统的信号曲线图。
41.图13示出了现有技术环路控制的信号曲线图。
42.图14示出了基于本文公开的创新的环路控制的信号曲线图。
43.图15示出了组合动态步长大小和可变计数器大小的环路控制系统的示例性信号曲线图。
44.图16a和图16b示出了具有可变计数器大小的环路控制系统的一个示例实施例的示例性操作方法。
具体实施方式
45.使用的一个示例环境是在利用光纤链路和激光器或一些其他形式的光信号发生器(光源)的光通信系统中。尽管在光通信系统中示出,但是还可以设想,该系统可以是电的并且用作导电信道。图1示出了示例性光纤通信链路。为了实现远程联网设备104a、104b之间的通信,提供光纤发送器和接收器。作为发送器108的一部分的激光驱动器112用调制电流驱动激光器116,该调制电流产生来自激光器的调制光输出。该光输出耦合到光纤120中以进行信号传输。在光纤链路的接收侧是接收器128。光能由光电二极管132转换成电信号,并由放大器136进一步处理,以将信号幅度设置为适合于下游处理元件的电平。可以设想,本文公开的创新可以在其他环境中使用,或者该使用环境可以与所示的不同。
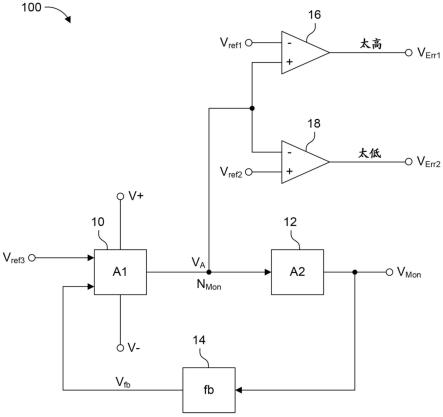
46.图2a示出了示例性可变增益放大器控制系统的框图。这只是一种可能的配置,并且可以预期,在不脱离本发明的范围的情况下其他实施例是可能的。在该实施例中,控制系统204向vga(variable gain amplifier,可变增益放大器)208提供模拟控制信号以控制vga的增益。从输入端212向vga208提供输入信号。输入信号可以从任何设备或系统提供,例如但不限于光电检测器。输入信号被放大(或去放大)并作为输出信号呈现在输出端子216上。放大(或去放大)的量(也称为增益)由控制信号确定。
47.vga控制系统204配置有峰值检测器220,如图所示,其接收来自输出端子216的输出信号。尽管在本文中被示出和描述为峰值检测器,但是可以检测信号的任何方面,诸如但不限于可以检测幅度、平均值、峰值。检测到的峰值可以是任何类型的监测器或检测器。峰值检测器220分析输出信号并生成表示输出信号的峰值op幅度(信号幅度)的值。在其他实施例中,可以使用除了峰值检测器之外的设备。峰值检测器220在本领域中通常是已知的,因此在本文中不再详细描述。在该实施例中,峰值检测器220还可以将信号转换为数字格式,因此可以包括一个或多个模数转换器。在一些实施例中,峰值检测器不包括比较器224或是比较器224的一部分。
48.峰值检测器220的输出馈送到比较器224。尽管示出为一个比较器224,但是比较器可以是一个或多个比较器。比较器224将来自检测器220的信号幅度与目标值228进行比较。目标值228是表示最适合于输出信号的下游处理的期望信号幅度的值。目标值可以由用户使用用户界面编程和改变,或者是固定的。目标值可以存储在存储器中。在该示例实施例中,比较器228提供“0”或“1”逻辑值的逻辑电平输出。在本文的讨论中,比较器228的输出提供指示比较结果的比较器输出信号。出于讨论的目的,该信号被称为up_dn信号,使得逻辑“0”值指示输出信号小于目标值,并且逻辑电平“1”值指示输出信号大于目标值。当输出信号小于目标幅度时,vga控制系统204的功能是增加vga 208的增益,这又将输出的幅度增加到目标值。通过减少控制向量(数字控制值)来增加vga的增益。相反,当输出信号大于目标
幅度时,vga控制系统204的功能是减少vga 208的增益,这又将输出的幅度减少到目标值。随着时间的推移,输出信号幅度将接近并处于目标值。比较器224的输出被定义为up_dn信号,其指示增益是应该增加还是减少。
49.比较器输出馈入数字控制单元232。数字控制单元232包括一个或多个逻辑元件、寄存器、存储器或被配置为处理来自比较器224的up_dn信号以生成控制向量的其他元件。控制向量是表示增益的数字值,使得增加控制向量减少增益,并且增加控制向量减少增益。在其他实施例或配置中,可以建立增益和控制向量之间的不同关系。在每个时钟周期或采样周期期间,增益可以少量、单个步长或大量(例如许多步长)增加。预期在周期或反复时间段期间,由检测器对输出信号进行采样,从而导致随时间产生新up_dn信号。
50.来自数字控制单元232的控制向量被提供给一个或多个数模转换器236。dac 236将控制向量从数字格式转换为模拟格式,该模拟格式适于注入模拟vga 208以控制增益。数字控制向量和dac配置有高分辨率,其由最小和最大控制向量值之间的步长数量确定。例如,在最小和最大控制向量值之间可以存在1000个或更多步长。分辨率(即最大和最小控制向量值之间的数字步长数量)越大,控制vga的增益和输出信号幅度的能力就越大。为了准确,通常优选具有高度的输出信号幅度控制,因此在数字控制向量和dac 236中需要大量的步骤。然而,如果大量步长可用,则从高增益状态改变到较低增益状态将花费更大数量的周期。
51.图2b示出了图2a中所示的数字控制单元的示例实施例。这只是元件的一种可能的配置,并且在不脱离本创新的情况下可以使用其他元件或布置。数字控制单元232包括控制逻辑,该控制逻辑被配置为处理如本文所述的接收信号并与数字控制单元的一个或多个其他元件交互。在各种实施例中,将不包括图2b中所示的每个元件。此外,数字控制单元232的一部分是数据存储寄存器和/或存储器254。数据存储寄存器和/或存储器254能够存储up_dn信号、max_step、step_size值或任何其他数据或机器可读代码,例如软件。处理器也可以是数字控制单元232的一部分,其被配置为执行以非暂时性状态存储在存储器254中的机器可读代码以执行本文所述的功能。所述功能或者或部分地由控制逻辑250执行。
52.在数字控制单元232中提供用户界面258,以便为用户提供访问以设置或改变存储在寄存器/存储器254中的一个或多个值,或更新软件/机器可读代码,或执行任何其他功能以实现系统的操作或适配。预期本文所述的功能可以通过使用控制逻辑和寄存器的硬件、在处理器266中执行的软件、或两者的组合来执行。如本文所讨论的,还提供一个或多个比较器262以比较各种值。在一些实施例中,比较器262可以由如图2a所示的比较器224代替,或者可以是软件功能。
53.调节增益的系统所呈现的一个挑战涉及增益变化随时间的变化率。虽然可以在时钟周期期间大量增加或减少增益,但是这样做通常是不期望的,因为增益的大的突然变化破坏了信号,从而破坏了下游信号处理和解码,这又引入了错误,从而使误码率达到峰值。
54.同时,太慢地改变增益也呈现若干缺点。在训练期间存在一个这样的缺点。在训练期间,系统适应未知信道,并且因此增益可能需要大量增加。如果增益的变化率较慢,例如由于在最小值和最大值之间的数字控制向量中具有大量步长,则vga可能花费过多的时间来呈现具有与目标值匹配的幅度的输出信号。如果发生这种情况,则系统将在设置的训练时间段期间不完成训练,并且下游系统训练也将被延迟或失败。以下讨论集中于比较器224
和数字控制单元232的操作,以实现克服现有技术的缺点的用于控制向量生成和适配的各种例程。
55.换句话说,数字控制器232将多个输出信号驱动到小型数模(dac)电路236的阵列。在其他实施例中,可以向单个dac提供单个输出。在该示例实施例中,dac 236是一起工作以定义(vga)208的增益的6位dac电路。数字控制单元232基于更宽的11位环路控制向量的值来判定多个dac 236如何在系统中一起工作。在该实施例中,自动增益控制(agc)环路具有用于环路控制向量的2018(0-2017)个唯一值。在其他实施例中,控制向量可以具有不同数量的唯一值。该数量是dac 236的数量和每个dac的唯一值的数量的函数。有意地以相对较慢的速度更新控制环路,以减少用数据路径的运动干扰数据路径的机会。结果,在现有技术系统中,将控制向量斜升到其收敛点会消耗大量时间。
56.在图6的实施例中,存在三个输入信号(“up_max”“、dn_max”和“up_dn”),其指示数字控制环路如何调节控制向量。这些信号由比较器生成,该比较器将实际信号强度(诸如峰值)与预定义目标进行比较。峰值检测器(最可能)用于测量输出波形的信号强度。闭环系统的目的是无论输入信号有多强或多弱(当然在极限内),确保输出信号强度是可预测的。
57.在讨论图6之前,讨论图3和图4。图3示出了用于控制向量调节的现有技术方法。图3的方法在步骤304开始于收集样本,但是然后在步骤308丢弃过渡的或在平均范围之外的一些样本。在步骤312,系统计算有效样本的平均数。接下来,在判定步骤316,该操作方法评估时间常数或时间段是否已经到期。如果不是,则操作返回以收集更多样本并继续计算平均值。一旦时间段期满,则在步骤320将样本与目标值进行比较,并且控制信号调节控制向量,该控制向量又调节vga的增益。还可以设想,主机控制器可以禁用自动环路,而是手动设置增益。在该实施例中,数字控制单元不自动改变增益。假设任何自动调节源自主机控制器。虽然这种操作方法是有效的,但它缺乏实时跟踪和增益调节的益处。
58.图4是调节控制向量的现有技术过程的更详细版本。从步骤404开始,数字控制器确定up_dn信号是逻辑0还是1,即输出信号是小于还是大于目标值。如果up_dn信号是0值,则应该减少控制向量,并且操作前进到判定步骤408。在判定步骤408,数字控制器确定控制向量是否处于最小值。如果控制向量处于最小值,则操作前进到结束,并且不对控制向量进行改变。可替代地,如果在步骤408控制向量不处于最小值,则将控制向量减少一个单位或增量。术语控制向量和控制代码可以互换使用。
59.可替代地,如果在步骤404,up_dn信号是指示控制向量应该被增加的逻辑1值,则操作前进到判定步骤420。在判定步骤420,控制逻辑确定控制向量是否处于最大控制向量值。如果是,则操作结束而不对控制向量进行任何改变,因为控制向量已经处于其最大值。可替代地,如果在步骤420控制向量不处于其最大值,则操作前进到步骤424。在步骤424,数字控制器将控制向量增加一个步长。在该示例实施例中,模拟系统被设计成使得最大控制向量代码对应于最低增益,并且最小控制向量代码对应于最高增益。在其他实施例中,在不脱离权利要求的范围的情况下,可以建立其他关系。当up_dn信号处于逻辑电平0时,它指示信号强度小于目标,因此系统应该增加增益(通过降低控制向量代码)。
60.在该示例操作方法中,基于来自环路的模拟部分的up_dn反馈信号来自动调节控制向量。控制向量使用单个步长每次仅改变一个单位或增量,这减少了干扰数据路径的机会。如果数据路径已经被输入信号的突然变化干扰,则慢速控制环路可能花费很长时间来
调节到新的平衡,从而导致训练阶段在实现理想增益收敛之前超时。使用单个步长延长了这种干扰。
61.图5示出了图4的方法的控制向量值对时间的示例曲线图。纵轴表示控制向量值,而横轴表示时间。如在该曲线图504中能够看到的,控制信号随时间增加,从第一时间508开始直到第二时间512,以达到期望的增益水平。使用如图所示的单个步骤,在该示例中需要1009次环路迭代来重新获取平衡。稳定时间很长,因为控制向量需要经过许多步骤以达到新平衡点。该步长数量和该时间量太长而不能在训练时间段期间完成。
62.虽然图4中讨论的现有技术方法适用于现有技术环境,但是它在vga控制系统中遭遇几个缺点,这些缺点具有高分辨率的增益控制和/或需要并非将输出信号缓慢获取到目标值。
63.图6示出了vga控制方法的操作流程图。这只是一种可能的操作方法,并且预期与该确切方法的偏差不脱离本文公开的创新。通常,这种操作方法利用具有三个比较器的控制环路。比较器将输出信号与目标值进行比较,以确定输出信号是大于还是小于目标值,并且所得到的比较结果得到up_dn信号。第二比较器将输出信号与目标值进行比较,以确定输出信号是否比目标值大第一阈值。第二比较器响应于该比较而输出dn_max信号。dn_max信号是0或1的逻辑值输出。逻辑值0指示输出信号没有比目标大第一阈值。第三比较器将输出信号与目标值进行比较,以确定输出信号是否比目标值小第二阈值。第三比较器响应于该比较而输出up_max信号。up_max信号是0或1的逻辑值输出。逻辑值0指示输出信号没有比目标小第二阈值。第一阈值和第二阈值可以是相同或不同的值,但是假设大于1。第二比较器响应于该比较而输出dn_max信号。因此,在操作期间,生成三个控制信号,即up_dn信号、dn_max信号和up_max信号。
64.使用这些值,在某些情况下,能够一次通过大于一个步长来调节控制向量。特别地,如果输出信号幅度与目标值之间的比较揭示输出信号幅度与目标值相差大于第一阈值或第二阈值的量,则这是输出信号远离目标值至大于阈值的量的指示。当发生这种情况时,指示控制向量应该移动多于一个增量,因此,控制值增加或减少定义为max_step值的若干增量。max_step值是存储在存储器或寄存器中的用户可设置值。max_step值是定义当输出信号从阈值量大于或小于目标值时控制值将增加或减少多少单位或增量的值。图6提供了该操作方法的更详细描述。
65.该操作方法从步骤604开始,其中,在输出信号(vga输出的峰值)和目标值之间进行比较。判定步骤608发生,使得来自比较器的比较器输出信号(up_dn信号)被数字控制单元检测和分析。如果up_dn信号是逻辑0值(意味着峰值小于目标值),则操作前进到判定步骤612。这通常可以被定义为减少控制向量的路径。在判定步骤612,比较器确定输出信号是否比目标值大阈值。如果在判定步骤612输出信号没有比目标值大阈值,则将dn_max信号设置为逻辑电平0,并且操作前进到判定步骤616。
66.在判定步骤616,确定控制向量是否已经处于其最小值,并且因此不能进一步减少。如果控制向量处于其最小值,则过程前进到步骤622并结束,但是输出信号与目标值的监测和比较随时间继续以提供实时和动态增益控制。
67.可替代地,如果在步骤616控制向量大于最小值,则操作前进到步骤620。在步骤620,控制系统将控制向量调节(减少)一,并且将vga增益向下调节一个单位或增量。
寄存器设置为“01”来启用该增强控制选项。
76.图7示出了图6的方法的控制向量值随时间的曲线图。控制向量值在纵轴730上表示,而时间在横轴734上表示。在环路开始时间708,环路开始相对于目标值检测和分析输出信号。在对应于信号曲线图712的时间段期间,系统确定输出信号与目标值相差较大的量,大于up_max或dn_max值,因此它通过每次环路迭代将step_max添加到控制向量来快速地斜升控制向量。在时间714,检测系统确定输出信号与目标值之间的差不是如此不同以至于保证控制向量中的max_step增加,因此在信号曲线图部分716的时间段期间,环路执行控制向量中的单个单位或增量增加,这导致增益中的小步长。在时间720,输出信号已经达到目标值,并且环路已经达到平衡。
77.使用图6的多步长大小模式,在该示例中仅需要65次环路迭代来重新获取平衡。这是相对于使用来自图4和图5的单个步长的93.6%的改进。
78.图8a是示出图8b和图8c之间的关系的索引。图8b和图8c示出了控制向量调节的替代方法的操作流程图。这只是一种可能的操作方法,并且可以设想,在不脱离本发明的范围的情况下,可以实现其他操作方法。在该实施例中,基于来自环路的模拟部分的“up_dn”反馈信号来自动调节控制向量。数字块监测“up_dn”随时间的历史,以基于up_dn信号的历史值来确定控制向量是否显著偏离目标。在该实施例中,每当更新控制环路时,移位寄存器或其他存储器类型存储“up_dn”的值。从堆栈的末尾丢弃最旧的值,而在开始处插入最新的值。这可以被称为先进先出过程。与其他实施例中一样,up_dn值(信号)是逻辑值0或1。
79.如图8b所示,该操作方法开始,使得在输出信号(vga输出的峰值)和目标值之间发生比较。该比较生成up_dn信号。该过程可以重复若干次,使得up_dn值被存储在存储器/寄存器中。如果“up_dn”的值连续不相同n次(其中,n是由用户在数字范围内设置的值),则控制环路最近已经越过其收敛点,并且步长大小减少一半。这是因为up_dn值随时间的变化指示输出信号最近已经处于或越过目标值而发生的。每次更新控制环路时发生控制向量的一半的这种减少,直到步长大小变为“step_min”(默认值1)。从数字控制单元输出回到“up_dn”输入的时间延迟相对较小,因此8次环路迭代足以检测多个交叉。在其他实施例中,可以使用不同数量的迭代。在输出信号与目标信号收敛时,步长大小应该始终是最小大小。当up_dn信号在预定数量(n)的样本上不改变时,指示步长大小可以增加或减少。对于每个环路迭代,将步长大小减少一半导致步长大小以及因此控制向量随时间更慢地改变。例如,如果步长大小为128,则将其减半导致步长大小为64,并且在下一次迭代期间为32,并且在下一次迭代期间,步长大小下降到16。因此,在仅三个周期中,步长大小已经从128下降到16。这导致控制向量的变化速率更快,但不会太快以至于中断操作。这些数字仅是示例性的,并且权利要求不受这些数值的限制。步长大小是控制向量改变的量,控制向量改变的量又控制增益,增益又控制输出信号幅度。
80.相同的原理适用于增加步长大小,当n个数量的up_dn信号相同(即逻辑1值)时,步长大小加倍。如果n个最近的up_dn信号值相同,则步长大小加倍。如果up_dn信号不改变,则每次更新控制环路时步长大小都增加,直到达到最大步长大小或者直到“up_dn”的值改变为止。最大步长大小防止步长大小变得太大,这可能导致一个步长大小中的增益变化太大。如果在“up_dn”为“1”的同时控制向量达到上限,则立即将步长大小减少到最小步长大小“step_min”。如果在“up_dn”为“0”的同时控制向量达到下限,则步长大小立即减少到“step_min”。可以通过将“step_mode”寄存器设置为“10”(默认值)来选择动态步长大小。
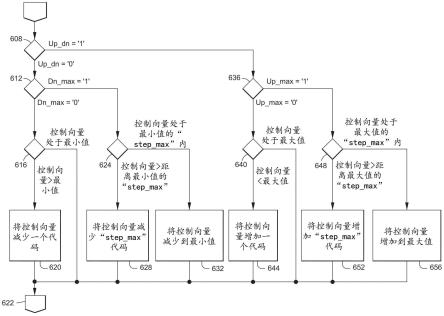
81.返回到图8b,该操作在数字控制单元处,特别是在数据存储寄存器中生成新up_dn值。该操作方法从步骤604开始,其中,在输出信号(vga输出的峰值)和目标值之间进行比较。该比较确定存储在存储器/寄存器中的up_dn值。在步骤808,数字控制单元将最新的up_dn值移位到寄存器中,这促使其他值向左移位,使得新值被插入到右侧。接下来,在判定步骤812,数字控制单元确定存储在寄存器中的up_dn的最后n个连续值是否相同,或者n个值是否不同。如果up_dn值的最后n个值不相同,则操作前进到判定步骤816。在判定步骤816,做出关于步长大小以及步长大小是处于最小值还是大于最小值的确定。如果在判定步骤816步长大小大于最小步长大小值,则操作前进到步骤820。在步骤820,步长大小减少一半。在其他实施例中,步长大小可以以不是一半的速率或量减少(或增加)。在步骤820之后,操作前进到判定步骤832,这将在下面在图8c上更详细地讨论。
82.现在返回到步骤816,如果步长大小为最小值,则遵循其不能再减少,因此操作前进到下面讨论的判定步骤832。返回到步骤812,如果up_dn历史使得历史(寄存器)显示n个相同的连续up_dn值,则操作前进到判定步骤824。在判定步骤824,通过将步长大小与步长大小最大值进行比较来进行确定。如果步长大小处于最大值,则操作前进到步骤832,并且由于步长大小已经处于最大值,因此不对步长大小进行改变。可替代地,如果步长大小小于最大值,则操作前进到步骤828,并且步长大小加倍,或者如上所述,或者增加某个值、比率或因子。在步骤828之后,操作前进到步骤832。
83.在判定步骤832(图8c),数字控制单元确定输出信号与目标值之间的比较导致up_dn信号是逻辑电平0还是逻辑电平1。如果up_dn为0,意味着输出信号小于目标值,则操作前进到步骤判定步骤836(用于控制向量的最终减少)。在判定步骤836,确定控制向量是否在最小控制向量值的step_size值内,或者控制向量是否比step_size大最小值。
84.如果控制向量在最小控制向量值的step_size值内,则操作前进到步骤840。在步骤840,数字控制器单元将控制向量减少到最小值,并且step_size值也减少到其最小值。此后,值调节在步骤858结束,并且环路通过返回到步骤804而迭代。
85.可替代地,如果在步骤836控制向量值在最小值之上大于step_size值,则操作前进到步骤842。在步骤842,数字控制单元将控制向量减少step_size值(代码)。在步骤842之后,操作在步骤858结束,并且通过返回到步骤804而发生新的环路迭代。
86.返回到步骤832,如果up_dn值为1,意味着输出信号大于目标值,则操作前进到判定步骤846。在判定步骤846,确定控制向量是否在最大值以下小于step_size,或者控制向量是否在最大值的step_size内。如果在判定步骤846,控制向量在最大值的step_size内,则操作前进到步骤850,并且数字控制单元将控制向量增加到最大值,并且还将step_size值减少到最小值。此后,操作在步骤858结束,并且环路通过返回到步骤804而迭代。
87.可替代地,如果控制向量在最大值小于step_size值,则操作前进到步骤854,并且数字控制单元将控制向量增加step_size大小数量的单位,也称为值、增量或代码。以上在步骤812-828计算步长大小。此后,操作在步骤858结束,并且环路通过返回到步骤804而重复。
88.换句话说,在该示例实施例中,基于来自环路的模拟部分的up_dn反馈信号来自动调节控制向量。数字控制单元监测up_dn信号随时间的历史,以确定控制向量是否显著偏离
目标,这在本实施例中通过up_dn信号在由移位寄存器中的n个连续up_dn值确定的n个连续环路迭代上不改变来确定。每次更新控制环路时,移位寄存器存储up_dn信号的值。在每次迭代期间,从堆栈的末尾丢弃up_dn信号的最旧存储值,而在开始处插入最新值。n可以是任何值,但是高值导致控制值更慢地改变。
89.如果up_dn信号的值连续不相同n次,则控制环路最近已经越过其收敛点,并且步长大小减少一半。这在每次更新控制环路时发生,直到步长大小变为step_min(默认值1)。从数字输出回到up_dn信号输入的时间延迟相对较小,因此八次环路迭代足以检测会聚点的多次交叉。在其他实施例中,可以定义(使用)不同数量的迭代。在收敛时,步长大小应该始终是最小大小,但是在此之前,当找到期望的增益水平时,控制向量甚至增益可以在目标值之上和之下的范围内变化。
90.如果“up_dn”的n个最近值相同,则步长大小增加1。当控制环路被更新时,步长大小被加倍(或者在其他实施例中增加一些其他增量或因子),直到达到最大步长大小或者直到up_dn信号的值改变。在该实施例中,步长大小等于2s,其中,s是递增或递减的步长大小寄存器。当s增加1时,步长大小加倍。当s减1时,步长大小被减半。在其他实施例中,可以实现其他数学算法。如果控制向量达到上限而up_dn仍然是逻辑电平1,则步长大小立即减少到最小步长大小step_min值。如果控制向量达到下限而“up_dn”是逻辑电平0,则步长大小立即减少到step_min值。在一个实现中,可以通过将step_mode寄存器设置为“10”(默认值)来选择动态步长大小。
91.在增加步长大小之前的n环路迭代延迟给出了有价值的滞后,从而避免了不稳定性。在本文描述的实施例中,步长大小保持小,直到在up_dn信号等于1的情况下经过了8次环路迭代。在此期间,控制向量以小步长来增加。一旦up_dn信号变为逻辑电平0,则步长大小立即减少,例如减少某个其它值的一半。这种不对称行为降低了控制向量在收敛时将交替超过最小步长大小(默认值1)的机会。在模拟期间,揭示了使用如图8a、图8b中所述的动态步长大小模式,在该示例中仅需要35次环路迭代来重新获得平衡。与使用单个步长相比,这是96.5%的改进。
92.图9示出了基于图8b和图8c的方法的控制向量调节的示例图。纵轴表示控制向量,横轴表示时间。控制向量信号调节过程在时间904开始。在初始阶段期间,信号在n次迭代中缓慢增加。在信号点908,出现了n个周期,并且step_size加倍。在图9中,步长大小在曲线图上方示出,并且从左到右以1、2、1、2、1、2、4、8、16、32、64、32、16、8、4、2、1的值示出。这些数字从1到2到4到8等加倍,直到达到64步的最大步长大小。该进展就在标记908附近开始。一旦达到最大步长大小(标记912),则控制向量将基于最大步长大小以该恒定速率增加,直到越过收敛点。曲线图912的部分标识步长大小处于其最大值(64)时的时间段。在其他实施例中,可以利用其他最大步长大小。
93.然后,在信号点916,输出信号幅度已经超过目标值,从而使控制向量开始减少。然后,在信号点920期间,已经发生接近平衡的状态并且在时间924达到接近平衡的状态。
94.虽然上述动态步长大小工作良好,但它可能导致不想要的环路收敛行为。例如,如果选择较大的步长大小(例如,32x),则可能导致环路坚持较大的步长大小模式,这将对抖动(dither)产生负面影响,并因此导致ber。这种行为限制了环路可以多快地操作。具有动态步长大小的最坏情况收敛时间的粗略方程如下所示。
95.收敛时间=时钟周期
×
数字环路状态的数量
×
平均动态步长大小(2)
96.该等式是一阶近似。
97.动态平均
98.减少环路收敛时间的另一种方法是动态地改变应用于up/dn信号的平均。在操作期间使用的平均主要是为了避免模式依赖性并具有良好的温度循环行为。基于实验室测量,环路平均(计数器值)可以被设置为128,并且当模式依赖性不太成问题时,在启动时仍然令人满意地操作。这指示人们能够舒适地实现收敛速度32x(4096/128)的近似增加。另一个方面是系统不仅能够实现更快的收敛时间,而且还能够保持良好的环路行为。关于利用“动态平均”的环路的代表性收敛行为,请参考图4。在适当的动态平均的情况下,收敛时间将大致为:
99.收敛时间=时钟周期
×
数字环路状态的数量
×
平均/动态步长大小
×
动态平均加速(3)
100.图10示出了具有可调节计数器大小的示例性系统的框图。这只是一个可能的实施例,因此实现类似控制功能的其他配置也是可能的。在该实施例中,输入1004将输入信号传送到在控制下的设备,诸如放大器1008。尽管为了本讨论和帮助理解而示出和描述为放大器,但是公开了在反馈环路的控制下的任何设备或元件可以被使用并且将受益于如本文所述的环路控制系统和方法。
101.在该实施例中,放大器1008被配置为将其输出信号幅度保持在参考值,使得环路反馈提供控制信号以使放大器增加或减少增益。如本文所讨论的,在启动时或在重置时,放大器的输出值会远离放大信号应该处于的参考值。如下面所讨论的,期望将放大信号快速收敛到参考值。
102.放大器的输出,即放大的信号,作为输出路径1012上的输出提供给误差检测器1016。误差检测器1016还从输入1020接收参考信号。误差检测器1016将放大信号与参考值进行比较。基于该比较,误差检测器1016向数字平均计数器1024和向上/向下(up/down)检测器(跟踪器)输出向上(up)信号或向下(down)信号。误差检测器可以包括比较器或能够将信号与参考值进行比较的任何其他装置。可以在制造时、在启动时将参考值提供给误差检测器1016,或者可以在操作期间或基于经由用户界面(未示出)的输入来动态地调节参考值。存储器或寄存器可以存储参考值。
103.数字平均1024可以被配置为具有能够在操作期间调节的计数器大小的计数器。计数器大小的范围从零到最大计数器大小。计数器大小是计数器在其生成输出(通常为逻辑1值或逻辑0值)然后重置之前必须达到的值。在一个实施例中,在重置时,计数器被重置为零和最大计数器大小之间的中点值。基于来自向上/向下检测器(跟踪器)1028的控制输入,能够调节计数器大小。例如,计数器大小的范围可以从零到4096,或从零到265,或任何范围。对于大的计数器大小,需要更多的输入来将计数器值推进到最大计数器值或将计数器值减少到零计数器值。对于较小的计数器大小,需要较少的输入来将计数器值推进到最大计数器值或将计数器值减少到零。数字平均计数器1024随着从误差检测器1016输出的每个向上信号而向上递增,并且随着从误差检测器1016输出的每个向下信号而向下递减。在达到最大计数器值时,数字平均计数器1024输出逻辑1值,并且在达到零计数器值时,数字平均计数器输出逻辑0值。在达到最大计数器值或零之后,计数器值被重置为零与最大计数器值之
间的中点值,并且过程重复。
104.向上/向下检测器1028监测并跟踪来自误差检测器1020的向上/向下输出。向上/向下检测器1028可以包括存储器、寄存器、控制逻辑、软件或被配置为如本文所述执行的任何其他元件或其组合。在接收到向上/向下信号的预定模式时,向上/向下检测器调节数字平均计数器1024的计数器大小。在不同的实施例中,预定模式可以是连续数量的向上信号或连续数量的向下信号,诸如但不限于八个连续的相同信号。在一个实施例中,预定模式可以是较大信号组中的一定数量的向上信号或向下信号,诸如但不限于来自误差检测器的最后八个信号中的六个向上信号。
105.当满足该预定模式时,指示放大信号远离参考值。放大信号可以远大于参考值或远低于参考值。因此,能够通过减少计数器大小来实现减少放大信号值处于或接近参考值的时间。减少计数器大小减少了数字平均计数器1024达到最大计数值所需的来自误差检测器1020的向上输出的数量,如下所述,最大计数值是增加放大器1008的增益所需的。类似地,减少计数器大小减少了数字平均计数器1024达到零计数值所需的来自误差检测器1020的向下输出的数量,这是减少放大器1008的增益所需的,也在下面讨论。在一个实施例中,计数器大小在4096处开始,并且随着时间的推移,响应于误差检测器输出预定模式的值(信号),并且在大小上减少到2048、到1024、到512、到256。在任何时间,如果误差检测器输出与预定模式不匹配,则计数器可以被重置为其最大大小,诸如4096。
106.从向上/向下检测器1028到数字平均计数器1024的控制信号控制数字平均计数器的计数器值。如果预定模式连续出现若干次,则计数器大小可以连续减少若干次,诸如从4096减少到2048、减少到1024等,一直减少到256。这些数字仅是为了理解的目的而提供的,因此,其他实施例可以具有不同的计数器大小值。然而,在一个实施例中,如果向上/向下检测器1028接收到不满足预定标准的输入模式,则这是放大信号处于或接近参考值的指示,因此,向上/向下检测器将数字平均计数器1024的计数器大小重置为其最大值,诸如在该示例实施例中为4096。
107.数字平均计数器1024的输出被提供给环路状态机,该环路状态机增加或减少表示当前增益状态的数字控制值。环路状态机可以包括存储器、控制逻辑、软件、处理器、比较器、寄存器或这些元件的任何组合中的一个或多个,其被配置为监测和跟踪来自误差检测器1016的一系列向上/向下信号,并将该系列向上/向下信号与预定模式进行比较。在增加或减少表示当前增益状态的数字控制值之后,将数字值提供给数模转换器1036,数模转换器1036将数字控制值转换为模拟信号,然后模拟信号作为增益控制信号被提供给放大器以调节增益。可以向上或向下调节增益。
108.图11示出了母案申请中描述的动态步长大小的曲线图。横轴1108表示时间,而纵轴1108表示环路状态。环路状态代表增益控制信号。在第一信号部分1118期间,步长大小被固定为正常步长大小。在该小步长大小出现一段时间之后,针对第二信号部分1122,步长大小被改变为大步长大小1126。注意,对于第一信号部分1118和第二信号部分1122两者,由时间段1130表示的调节增益所花费的时间是相同的。因此,即使步长大小增加,步长大小变化之间的时间也是固定的。
109.该过程重复直到点1134。然而,在点1134,增益值已经超过期望的稳定状态水平1114。然后,需要信号部分1138和与其相关联的额外时间来接近稳定状态。此后,环路控制
在信号部分1140中将增益值保持在稳定状态。用图10所示的系统和所得到的操作方法克服了步长大小变化和过冲(overshoot)之间的恒定时间。
110.图12示出了基于图10所示系统的信号曲线图。该曲线图仅是示例性的,并且出于讨论和帮助理解的目的而提供。横轴1208表示时间,而纵轴1204表示环路状态。与图11相比能够看出,在信号曲线图部分1212期间,增益值(步长)的变化之间的时间1216小于信号曲线图部分1230中的步长变化之间的时间。这减少了实际增益水平达到处于或接近稳定状态值1114的理想增益水平所花费的时间,并且减少或消除了与现有技术方法和母案申请的动态步长大小相关联的过冲。
111.图10中所示的系统已经实现并测试。下面的图13、图14和图15示出了由实际信号曲线图证明的改进。图13示出了现有技术环路控制的信号图。横轴1304表示时间,而纵轴1308表示以伏特为单位的环路状态。如图所示,信号曲线图1312缓慢地斜升到稳定状态电平1316。在该现有技术系统中,需要大约90微秒。在此期间,放大器或在控制下的任何其他设备的增益水平不处于适当的水平,从而抑制了期望的系统操作,并且可能阻止后续系统开始操作,诸如训练过程。
112.图14示出了基于本文公开的创新的环路控制的信号曲线图。横轴1404表示时间,而纵轴1408表示以伏特为单位的环路状态。如图所示,信号曲线图1412快速地斜升到稳定状态电平1416。在该系统中,收敛发生的速度比图13的现有技术曲线快约33倍。这加速了系统操作,并允许后续系统开始操作,例如训练程序。
113.还可以设想,可以组合母案申请的方法和装置以及本文公开的可变计数器大小方法以允许更大的改进。环路可以单独操作或被配置成单个环路,以允许动态步长大小以及具有可变计数器大小。因此,能够减少计数器步长大小以加速收敛到稳定状态,但是能够增加步长大小(步长大小增加或减少增益),这也加速收敛到稳定状态。
114.图15示出了组合动态步长大小和可变计数器大小的环路控制系统的示例性信号曲线图。横轴1504表示时间,而纵轴1508表示以伏特为单位的环路状态。如图所示,信号曲线图1512快速地斜升到稳定状态电平1516。在该系统中,收敛比图13的现有技术曲线图快大约100倍。这加速了系统操作,并允许后续系统开始操作,例如训练程序。
115.图16a和图16b示出了具有可变计数器大小的环路控制系统的一个示例性实施例的示例性操作方法。这只是一种可能的操作方法,因此,实现可变计数器大小的其他方法是预期的并且是可能的。在步骤1604,该操作方法为数字平均计数器设置初始数字平均计数器大小。数字平均计数器大小是计数器或其他元件的大小,该计数器或其他元件确定在数字平均计数器将输出1或0输出之前必须接收的超过相反的向上或向下输入的数量的向上输入或向下输入的数量。例如,计数器大小可以是4096,并且如果计数器的起始值是2048的中点,则将需要2048个向上信号,超过接收到的任何向下信号的量,以从数字平均计数器输出逻辑1输出。类似地,计数器大小是2048并且计数器的起始值是1024的中点,则将需要1024个向下信号,超过所接收的任何向上信号的量,以从数字平均器计数器输出逻辑零输出。如下所述,在操作期间,可以改变计数器大小以调节在控制下的设备收敛到其期望水平或值的速率。
116.在步骤1608,为连续的向上/向下信号模式跟踪器设置改变数字平均器计数器的大小所需的阈值。例如,向上/向下信号模式可以被设置为向上/向下信号的各种模式。并且
在接收到所定义的向上/向下信号的模式时,能够改变计数器大小。
117.在步骤1612,放大器(控制下的设备)接收输入信号,该输入信号将被放大到参考值、处于参考值或接近参考值。尽管关于放大电平进行了讨论,但是在控制下的设备可以是由环路控制的任何设备,这将受益于改善的环路收敛时间。在步骤1616,放大器放大接收信号以产生放大的信号。然后,在步骤1620,利用误差检测器或任何类型的比较器将放大信号与参考值进行比较。参考值是接收信号在放大之后应该具有的值。参考值可以存储在存储器或寄存器中,并且其可以在制造时设置,由用户在稍后的时间设置,或者在操作期间动态调节。用户界面(未示出)可以提供用于设置或改变参考值的手段。
118.在步骤1624,基于在步骤1620的比较,误差检测器生成并输出向上信号或向下信号。向上信号指示放大信号小于参考值,并且向下信号指示放大信号大于参考值。在步骤1628,从误差检测器输出的向上信号或向下信号被提供给数字平均计数器。在步骤1632,当接收到向上信号时,数字平均计数器递增其计数,而接收到向下信号则使数字平均计数器将其计数递减1。然后,在步骤1636,在数字平均计数器值的当前计数与数字平均计数器大小之间进行比较。
119.转到图16b,在判定步骤,如果数字平均器计数器值等于计数器大小或等于零,则操作前进到步骤1644。在步骤1644,因为计数器已经达到其最大或最小大小,所以它将生成输出,这导致递增或递减环路状态的输出。环路状态可以是表示放大器的增益值的数字值。来自计数器的逻辑1输出导致环路状态递增,而来自计数器的逻辑0值导致环路状态递减。递增环路状态增加了放大器的增益,而递减环路状态导致放大器增益的减少。在其他实施例中,可以建立其他标注。
120.从步骤1644,操作前进到步骤1648,并且基于环路状态的改变来调节增益。参考图10,由于环路状态作为数字值被提供给dac,因此增益被调节,dac然后向放大器提供模拟控制信号。在步骤1648,数字平均计数器被重置到其中点,在本实施例中,该中点在零和最大计数器大小之间。该步骤可以替代地在该操作方法中稍后发生。在步骤1648之后,操作前进到判定步骤1652。
121.可替代地,如果在判定步骤1640确定数字平均计数器大小不等于计数器最大值或最小值,则操作前进到判定步骤1652。在判定步骤1652处,确定来自误差计数器的当前向上/向下信号是否与最后的向上/向下信号相同。在该实施例中,模式是一定数量的连续向上信号或向下信号。在其他实施例中,必须满足的先前向上/向下信号的模式可以不是连续的,诸如一组最近接收的信号中的一定数量的向上/向下信号。如果没有满足向上/向下检测器的模式,则操作前进到步骤1672。在步骤1672,确定当前数字平均计数器大小是否小于最大计数器大小。如果是,则操作前进到步骤1676,并且系统将数字平均计数器大小设置为最大大小。此后,操作前进到步骤1680,并且由于最近的向上/向下信号与最后的向上/向下信号不同,所以向上/向下检测器被重置。在步骤1680之后,操作前进到步骤1668并且操作返回到步骤1612。如果在步骤1672,数字平均计数器大小不小于最大值,则操作前进到步骤1680。在步骤1680中,重置向上/向下检测器,然后操作前进到步骤1668。
122.可替代地,如果在步骤1652,当前向上/向下信号与先前向上/向下信号相同,则操作前进到步骤1656,并且向上/向下检测器内的模式被更新以反映与来自误差检测器的先前信号相同的另一向上信号或向下信号。然后在判定步骤1660,确定连续向上信号或连续
向下信号的数量(或模式)是否满足阈值(或模式)。例如,阈值可以是八个连续的向上信号或八个连续的向下信号。在其他实施例中,预定数量或模式可以改变。
123.如果在步骤1660,连续数量的向上信号或连续的向下信号不满足阈值,则操作前进到步骤1668,系统操作返回到步骤1612。可替代地,如果在步骤1660,连续的向上信号或连续的向下信号的数目满足阈值,则操作前进到步骤1664,并且如果计数器尚未处于其最小值,则系统减少数字平均计数器的大小。在该操作方法中,计数器大小可以减少一半,或一些其他倍数或量。在一个实施例中,计数器大小在4096开始,但是随着时间的推移,将以设置方式减少到256。在步骤1668之后,操作返回到步骤1668,然后返回到步骤1612。
124.通过研究以下附图和详细描述,本发明的其他系统、方法、特征和优点对于本领域技术人员将是或将变得清楚。所有这样的附加系统、方法、特征和优点旨在包括在本说明书内、在本发明的范围内,并且由所附权利要求保护。
125.虽然已经描述了本发明的各种实施例,但是对于本领域普通技术人员清楚的是,在本发明的范围内的更多实施例和实施方式是可能的。另外,本文描述的各种特征、元件和实施例可以以任何组合或布置来要求保护或组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。