1.本技术涉及机器人配件制造技术领域,更具体地,涉及一种机器人快速扩展设备。
背景技术:
2.现有的机器人常规使用的是标准产品和客户定制型产品。标准产品采用标准配置,即较少甚至没有考虑到客户不同的需求,不允许扩展,目的是为了保持产品的一致性和稳定性。客户定制型,采用完全定制模式,即在项目初始阶段,已经将需要的设备罗列完全,并做了适配性的设计。
3.现有技术中的机器人标准产品或定制型产品通常存在以下缺点:
4.1、标准产品的目的是保持产品的一致性,忽略了客户对机器人产品,在不同使用场景下的不同的需求,极大限制了机器人产品的灵活性和多样性。
5.2、标准产品为了保持产品的一致性,导致了一些功能上的浪费。
6.3、标准产品为了保持产品的稳定性,一般不允许客户对机器人进行拆装,导致了产品运输难度大等。
7.4、定制产品的生产周期长,定制功能在满足客户需求的前提下,却牺牲了机器人的灵活配置性。
技术实现要素:
8.本技术的一个目的是提供一种机器人快速扩展设备的新技术方案,至少能够解决现有技术中标准产品或定制产品不能扩展,不便拆卸等问题。
9.根据本技术的第一方面,提供了一种机器人快速扩展设备,包括:主杆体,所述主杆体的靠近第一端的位置处设有容纳槽,以容纳信号线;第一连接组件,所述第一连接组件可拆卸地设于所述主杆体的第一端,以将所述主杆体可拆卸地固定在外接设备上;多媒体监控器,所述多媒体监控器具有标准接口;至少一个延长杆,所述延长杆设于所述主杆体和所述多媒体监控器之间,所述延长杆的一端与所述标准接口相对应,所述延长杆的一端与所述多媒体监控器可拆地连接,所述延长杆的另一个端与所述主杆体的第二端可拆卸地连接。
10.可选地,所述主杆体的形状为柱状,所述容纳槽凸出所述主杆体的外壁面。
11.可选地,所述机器人快速扩展设备还包括:护线环,所述护线环设于所述容纳槽上,以盖合所述容纳槽。
12.可选地,所述第一连接组件包括:固定环,所述固定环的一端套设于所述主杆体的第一端,所述固定环的另一端用于设在外接设备上,所述固定环上设有螺纹孔;手拧螺母,所述手拧螺母与所述螺纹孔配合,以连接外界设备和所述主杆体。
13.可选地,所述固定环内设有固定块,所述固定块与所述手拧螺母相对应,以通过所述固定块压紧所述主杆体。
14.可选地,所述延长杆的个数为一个,所述延长杆与所述主杆体之间通过第二连接
组件连接。
15.可选地,所述延长杆的个数为两个,两个所述延长杆在其长度方向上相互连接,朝向所述主杆体的一个所述延长杆与所述主杆体之间通过所述第二连接组件连接。
16.可选地,所述第二连接组件包括:转接环,所述转接环设于所述延长杆和所述主杆体之间,所述转接环上设有连接孔;锁紧扣,所述锁紧扣设于所述连接孔,以将所述转接环锁紧在所述延长杆和所述主杆体上。
17.可选地,所述锁紧扣包括:锁紧螺帽;锁紧扳手,所述锁紧扳手的一端穿过所述连接孔,所述锁紧螺帽设于所述锁紧扳手的穿过所述连接孔的一端,以由所述锁紧扳手和所述锁紧螺帽的配合,锁紧所述转接环。
18.可选地,所述多媒体监控器的形状为柱状,所述多媒体监控器设有摄像头和/或红外热成像仪。
19.根据本实用新型实施例的机器人快速扩展设备,通过设置至少一个延长杆,可以对主杆体的长度进行扩展,延长杆和多媒体监控器采用可拆卸地连接方式,主杆体和外接设备通过第一连接组件可拆卸地连接,便于机器人快速扩展设备的快速装配。
20.通过以下参照附图对本技术的示例性实施例的详细描述,本技术的其它特征及其优点将会变得清楚。
附图说明
21.被结合在说明书中并构成说明书的一部分的附图示出了本技术的实施例,并且连同其说明一起用于解释本技术的原理。
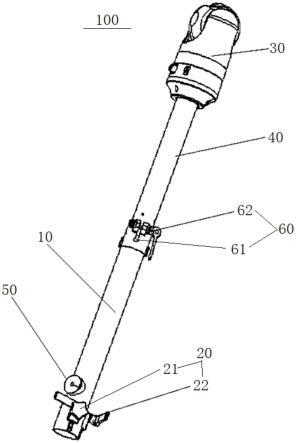
22.图1是本实用新型实施例的机器人快速扩展设备的结构示意图;
23.图2是本实用新型实施例的主杆体的结构示意图;
24.图3是本实用新型实施例的护线环的结构示意图;
25.图4是本实用新型实施例的固定环的结构示意图;
26.图5是本实用新型实施例的手拧螺母的结构示意图;
27.图6是本实用新型实施例的延长杆的结构示意图;
28.图7是本实用新型实施例的转接环的结构示意图;
29.图8是本实用新型实施例的锁紧扣的结构示意图;
30.图9是本实用新型实施例的多媒体监控器的结构示意图。
31.附图标记:
32.机器人快速扩展设备100;
33.主杆体10;容纳槽11;
34.第一连接组件20;固定环21;螺纹孔211;手拧螺母22;
35.多媒体监控器30;
36.延长杆40;
37.护线环50;
38.第二连接组件60;转接环61;连接孔611;锁紧扣62;锁紧螺帽621;锁紧扳手622。
具体实施方式
39.现在将参照附图来详细描述本技术的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本技术的范围。
40.以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使用的任何限制。
41.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
42.在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
43.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
44.下面结合附图具体描述根据本实用新型实施例的机器人快速扩展设备100。
45.如图1至图8所示,根据本实用新型实施例的机器人快速扩展设备100包括主杆体10、第一连接组件20、多媒体监控器30和至少一个延长杆40。
46.具体而言,主杆体10的靠近第一端的位置处设有容纳槽11,以容纳信号线。第一连接组件20可拆卸地设于主杆体10的第一端,以将主杆体10可拆卸地固定在外接设备上。多媒体监控器30具有标准接口。延长杆40设于主杆体10和多媒体监控器30之间,延长杆40的一端与标准接口相对应,延长杆40的一端与多媒体监控器30可拆地连接,延长杆40的另一个端与主杆体10的第二端可拆卸地连接。
47.换言之,如图1所示,根据本实用新型实施例的机器人快速扩展设备100主要由主杆体10、第一连接组件20、多媒体监控器30和至少一个延长杆40组成。其中,主杆体10的靠近第一端的位置处设置有容纳槽11,如图1和图2所示,容纳槽11可以容纳信号线,信号线可以设置在主杆体10内。第一连接组件20设置在主杆体10的第一端,第一连接组件20与主杆体10采用可拆卸的连接方式,通过第一连接组件20可以将主杆体10可拆卸地固定在外接设备上,提高主杆体10与外界设备之间的装配效率。
48.如图9所示,多媒体监控器30具有标准接口。多媒体监控器30可以采用多功能型的多媒体监控器30,多媒体监控器30上可以根据实际需要灵活配置功能。延长杆40安装在主杆体10和多媒体监控器30之间,主杆体10可以通过延长杆40支撑多媒体监控器30。延长杆40可以根据实际需要进行增加或不设置延长杆40。通过设置延长杆40可以加高多媒体监控器30的高度,便于将机器人快速扩展设备100应用于火车站、带植物带等比较高的地方,避免人流或植物带遮挡视线。
49.延长杆40的一端具有与标准接口相对应的接口,便于延长杆40与多媒体监控器30直接连接,满足现场5分钟内快速装配完毕、快速响应。延长杆40的一端与多媒体监控器30可拆地连接,延长杆40的另一个端与主杆体10的第二端可拆卸地连接,实现延长杆40与主杆体10和多媒体监控器30的快速装配连接。
50.本技术的机器人快速扩展设备100可以根据不同的项目需求搭配不同的组件,或者配套多个组件,由客户根据现场环境选择不同组件并自行搭配。该机器人快速扩展设备100可拆洗,提升了设备的运输便利性。并且机器人快速扩展设备100的可拆卸性,其核心运
动平台可直接放置于小汽车尾箱,降低了设备运输条件,极大提升了设备转移速度。该机器人快速扩展设备100易装配,核心运动平台为标准配置,扩展结构件(例如:延长杆40等)可以不用使用工具进行安装,客户可以迅速完成部署。同时该机器人快速扩展设备100易维护,当单个摆臂任意零部件出现异常,可以单独将摆臂拆下,进行整体更换和维护,方便的维护人员维护也缩短因为故障而引起的设备无法运作,降低机器人故障率。
51.由此,根据本实用新型实施例的机器人快速扩展设备100,通过设置至少一个延长杆40,可以对主杆体10的长度进行扩展,延长杆40和多媒体监控器30采用可拆卸地连接方式,主杆体10和外接设备通过第一连接组件20可拆卸地连接,便于机器人快速扩展设备100的快速装配。
52.根据本实用新型的一个实施例,主杆体10的形状为柱状,容纳槽11凸出主杆体10的外壁面。机器人快速扩展设备100还包括:护线环50,护线环50设于容纳槽11上,以盖合容纳槽11。
53.也就是说,参见图1和图2,主杆体10的形状可以设置成柱状,容纳槽11可以凸出主杆体10的外壁面。机器人快速扩展设备100还包括护线环50,如图3所示,护线环50安装在容纳槽11上,护线环50可以盖合容纳槽11。通过设置护线环50可以避免信号线在多次拆装时破坏线皮。同时还可以避免淋雨时水流通过容纳槽11,大量进入主杆体10,对设备造成损害。
54.根据本实用新型的一个实施例,第一连接组件20包括固定环21和手拧螺母22。
55.具体地,固定环21的一端套设于主杆体10的第一端,固定环21的另一端用于设在外接设备上,固定环21上设有螺纹孔211。手拧螺母22与螺纹孔211配合,以连接外界设备和主杆体10。固定环21内设有固定块,固定块与手拧螺母22相对应,以通过固定块压紧主杆体10。
56.换句话说,如图1、图4和图5所示,第一连接组件20主要由固定环21和手拧螺母22组成。其中,固定环21和手拧螺母22配套使用,用于将主杆体10快速可靠地固定到外接设备上。固定环21的一端可以套设于主杆体10的第一端,固定环21的另一端用于连接在外接设备上。主杆体10的第一端和第二端为主杆体10的长度方向的两端。固定环21上设有螺纹孔211。固定环21可以确保长杆多节级联时能够可靠固定。手拧螺母22与螺纹孔211配合,可以连接外界设备和主杆体10。固定环21内设有固定块,固定块与手拧螺母22相对应,通过手动转动手拧螺母22,可以将固定环21中的固定块压迫顶紧在主杆体10上,实现机器人快速扩展设备100的稳固连接,提高设备整体稳定性。
57.在本实用新型的一些具体实施方式中,延长杆40的个数为一个,延长杆40与主杆体10之间通过第二连接组件60连接。延长杆40的个数为两个,两个延长杆40在其长度方向上相互连接,朝向主杆体10的一个延长杆40与主杆体10之间通过第二连接组件60连接。
58.也就是说,参见图1和图6,延长杆40的个数可以采用一个。延长杆40与主杆体10之间通过第二连接组件60连接。延长杆40的个数可以采用两个,两个延长杆40在其长度方向上相互连接,其中,朝向主杆体10的一个延长杆40与主杆体10之间通过第二连接组件60连接。延长杆40的个数可以根据现场实际需要进行具体选择,通常情况下,延长杆40不超过两根。通过设置延长杆40,主要用途为在火车站或者带植物带比较高的地方,加高多媒体监控器30的高度,避免人流或者植物带遮挡视线。
59.根据本实用新型的一个实施例,第二连接组件60包括转接环61和锁紧扣62。
60.具体地,转接环61设于延长杆40和主杆体10之间,转接环61上设有连接孔611。锁紧扣62设于连接孔611,以将转接环61锁紧在延长杆40和主杆体10上。
61.也就是说,参见图1、图7和图8,第二连接组件60主要由转接环61和锁紧扣62组成。其中,转接环61安装在延长杆40和主杆体10之间,转接环61用连接延长杆40和主杆体10。转接环61上设置有连接孔611。锁紧扣62安装在连接孔611上,通过手动转动锁紧扣62,可以将转接环61锁紧在延长杆40和主杆体10上,实现延长杆40和主杆体10的装配,保证机器人快速扩展设备100连接的稳固性。
62.根据本实用新型的一个实施例,锁紧扣62包括锁紧螺帽621和锁紧扳手622。
63.具体地,锁紧扳手622的一端穿过连接孔611,锁紧螺帽621设于锁紧扳手622的穿过连接孔611的一端,以由锁紧扳手622和锁紧螺帽621的配合,锁紧转接环61。
64.换句话说,如图8所示,锁紧扣62主要由锁紧螺帽621和锁紧扳手622。其中,锁紧扳手622的一端可以穿过连接孔611,锁紧螺帽621设置在锁紧扳手622的穿过连接孔611的一端。通过锁紧扳手622和锁紧螺帽621的配合,可以锁紧转接环61,进而通过转接环61将延长杆40和主杆体10进行稳固连接。
65.在本技术中,锁紧扣62通过手动拧或扳,可以快递锁紧延长杆40。转接环61与锁紧扣62配套使用,用于紧固延长杆40,该部件属于快拆件,在设备转运时,快速拆装,降低设备的运输条件。而在部署现场,可以根据现场条件快速搭建监控平台。
66.根据本实用新型的一个实施例,多媒体监控器30的形状为柱状,多媒体监控器30设有摄像头和/或红外热成像仪。
67.也就是说,参见图1和图9,多媒体监控器30的形状可以设置成柱状,多媒体监控器30设置有摄像头和/或红外热成像仪。该多媒体监控器30为项目定制,可以标配高清相机。也可以根据客户需求,搭配不同的摄像头或者红外热成像仪。搭配摄像头时,可以用于收集音视频数据。搭配红外热成像仪时,可以检测人体体温或者发现着火点。不同的设备,搭配同样的接口,满足现场5分钟内更换完毕,快速响应。
68.在本技术中,机器人快速扩展设备100的应用场景为快速布防,在不同场景下有不同的外设要求,并且要求可以放置在小轿车尾箱。本技术的机器人快速扩展设备100的基本原理是,将作为机器人核心部件之一的外设支架,设计成可拆卸,可定制更改式,机器人另一个核心部件运动平台作为标准量产品。整个外设支架通过固定环21和手拧螺母22紧固在运动平台(外接设备)上,固定环21和手拧螺母22的拆装可以在30s内完成,满足现场布防时的快速响应。
69.机器人快速扩展设备100中的信号线,包括了网络信号、rs485、rs232、can和12v/24v电源线等,囊括大部分外接设备的通讯和电源要求。主杆体10的主要作用为支撑起多媒体监控器30。在本技术中,延长杆40、锁紧扣62和转接环61可以根据实际需要进行设置。当客户对监控高度有不同要求时,可通过延长杆40、锁紧扣62和转接环61进行加高。
70.因此,本技术的机器人快速扩展设备100具有以下优点,
71.1、保持产品在标准化制造的基础上,可以灵活配置功能。
72.2、定制化功能灵活开发配置。
73.3、便利于客户快速拆装,并保证机器人产品整体稳定性。
74.4、机器人产品在转换工作地点时运输的便利性。
75.5、在工作场景下的快速响应设置。
76.当然,对于本领域技术人员来说,机器人快速扩展设备100的工作原理是可以理解并且能够实现的,在本技术中不再详细赘述。
77.总而言之,根据本实用新型实施例的机器人快速扩展设备100,通过设置至少一个延长杆40,可以对主杆体10的长度进行扩展,延长杆40和多媒体监控器30采用可拆卸地连接方式,主杆体10和外接设备通过第一连接组件20可拆卸地连接,便于机器人快速扩展设备100的快速装配。
78.虽然已经通过例子对本技术的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本技术的范围。本领域的技术人员应该理解,可在不脱离本技术的范围和精神的情况下,对以上实施例进行修改。本技术的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
