1.本发明涉及水面无人艇技术领域,具体涉及一种水面无人艇群体智能学习模拟器设计方法及系统。
背景技术:
2.水面无人艇可以定义为在各种杂乱环境中执行任务的无人驾驶设备,无需任何人为干预,基本上表现出高度非线性动力学。无人艇的进一步开发将带来巨大的效益,如降低开发和运行成本,提高人员安全和安保,扩大操作范围,提高自主性和精度,以及在复杂环境中增加灵活性。功能强大的导航设备,例如全球定位系统(gps)和惯性测量单元(imu),以及鲁棒性更好的无线通信系统,为水面无人艇应用提供了前所未有的机会。
3.水面无人艇模拟器旨在模拟现实动态复杂环境中的无人艇实验,测试无人艇多源状态感知体系的性能效果。在无人艇系统的开发过程中,往往都需要先经过模拟器来验证整体的可行性、安全性和鲁棒性,才能够被应用到实际系统当中。同时一个高模拟程度的模拟器能够有利于系统与实际环境匹配。可见,如果没有一个完备的无人艇模拟器,那么无论是对无人艇系统的开发还是安全性而言都是十分不利的。
技术实现要素:
4.有鉴于此,本发明的目的在于克服现有技术的不足,提供一种水面无人艇群体智能学习模拟器设计方法及系统,本发明能够实现无人艇的动力、通信、卫星定位子系统、群艇信息同步以及运行环境等多源状态感知模拟需求。
5.为实现以上目的,本发明采用如下技术方案:一种水面无人艇群体智能学习模拟器设计方法,包括:
6.对无人艇动力学参数进行模拟;
7.对无人艇状态参数进行模拟;
8.基于模拟出的动力学参数和状态参数,对无人艇故障参数进行仿真;
9.针对任务过程中的无人艇,对影响无人艇运行的环境参数进行模拟并输出。
10.可选的,所述对无人艇动力学参数进行模拟,包括:
11.分析无人艇的运动学和动力学特征,通过建立无人艇运动学模型,加入各类约束及限定条件,模拟无人艇平台的动力学参数,并输出该无人艇在不同运动模式下的姿态参数。
12.可选的,所述对无人艇动力学参数进行模拟,包括:采用分离型建模方法建立单个无人艇运动学模型;
13.具体包括:
14.按作用力的性质,对无人艇运动和受力进行分析;
15.根据对无人艇运动和受力的分析结果,首先建立描述无人艇运动的固定坐标系和随动坐标系及其转换关系,其次根据动量动力和动量矩定理,推导出无人艇六自由度空间
运动方程,利用分离型建模方法建立六自由度运动模型。
16.可选的,所述对无人艇状态参数进行模拟,包括:
17.根据无人艇的动力来源,构建热力学方程及iv变化曲线,模拟传感器的采集功能,输出不同工况及特定故障下的无人艇核心部件状态参数。
18.可选的,所述对无人艇故障参数进行仿真,包括:
19.以无人艇动力系统为对象,分析无人艇设备对于各类故障的表现形式;
20.在总结各类故障表现形式的基础上,针对柴油机无人艇模拟器,结合柴油机台架试验数据,进行各类故障状态下的柴油机热力学参数模拟及输出;针对电动力无人艇模拟器,通过控制上位机结合电源模拟器来模拟无人艇电机的故障情况,模拟输出电机在各类故障下的i-v曲线。
21.可选的,该方法还包括:
22.建立艇群状态空间模拟器,以模拟水面无人艇集群正常运行和单艇发生故障时的多艇间的信息交互和同步,以进一步满足艇群不同运行状态下的感知模拟需求;
23.其中,所述艇群状态空间模拟器至少包括:多艇通讯接口同步模拟模块和运行环境接口交互模拟模块。
24.可选的,所述艇群状态空间模拟器包括:无人艇间的通信和数据交互;
25.其中,数据交互采用udp协议进行数据发送和接收,交互命令至少包括:初始化、航迹点、目标、命令和故障类型。
26.可选的,该方法还包括:
27.设计可视化仿真系统,其中,所述可视化仿真系统包括:上位机试验控制模块、无人艇状态仿真模块和可视化模块;
28.所述上位机试验控制模块用于管理整个仿真过程,所述上位机试验控制模块订阅系统广播的消息;所述上位机试验控制模块还广播如下消息:no.x号艇发生故障,以及每条艇的运行状态;所述上位机试验控制模块根据广播的消息配置艇数量,并解算每条艇的位置,发送至所述可视化模块;
29.所述可视化模块用于根据接收到所述上位机试验控制模块发送的设置信息调用相应库模型,完成角色加载,并等待上位机仿真开始指令;
30.所述无人艇状态仿真模块用于对无人艇故障参数进行仿真。
31.本发明还提供了一种水面无人艇群体智能学习模拟器仿真系统,包括:
32.上位机试验控制模块、无人艇状态仿真模块和可视化模块;
33.所述上位机试验控制模块,用于订阅系统广播的消息,还用于向系统广播如下消息:no.x号艇发生故障,以及每条艇的运行状态;还用于根据广播的消息配置艇数量,并解算每条艇的位置,形成设置信息,并发送至所述可视化模块;
34.所述可视化模块用于根据接收到的设置信息调用相应库模型,完成角色加载,并等待上位机仿真开始指令;
35.所述无人艇状态仿真模块用于对无人艇故障参数进行仿真。
36.此外,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如前面任一项所述的水面无人艇群体智能学习模拟器设计方法。
37.本发明采用以上技术方案,通过对无人艇单艇运动学建模、无人艇群艇信息同步模块设计以及无人艇运行环境状态空间建模,实现了无人艇的动力、通信、卫星定位子系统、群艇信息同步以及运行环境等多源状态感知模拟需求,有助于对无人艇系统的开发以及提高无人艇系统的安全性。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
39.图1是本发明一种水面无人艇群体智能学习模拟器设计方法一个实施例提供的流程示意图;
40.图2是无人艇在静水中航行的受力示意图;
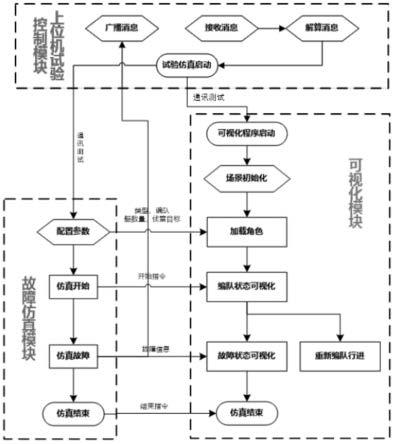
41.图3是可视化仿真系统的原理示意图;
42.图4是可视化仿真系统的具体工作流程示意图;
43.图5是本发明一种水面无人艇群体智能学习模拟器仿真系统一个实施例提供的结构示意图。
具体实施方式
44.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
45.图1是本发明一种水面无人艇群体智能学习模拟器设计方法一个实施例提供的流程示意图;
46.如图1所示,本实施例所述的方法包括:
47.s11:对无人艇动力学参数进行模拟;
48.s12:对无人艇状态参数进行模拟;
49.s13:基于模拟出的动力学参数和状态参数,对无人艇故障参数进行仿真;
50.s14:针对任务过程中的无人艇,对影响无人艇运行的环境参数进行模拟并输出。
51.需要说明的是,无人艇模拟器主要包括动力学参数模拟、状态参数模拟、故障参数仿真、环境参数仿真四个部分。
52.进一步的,所述对无人艇动力学参数进行模拟,包括:
53.分析无人艇的运动学和动力学特征,通过建立无人艇运动学模型,加入各类约束及限定条件,模拟无人艇平台的动力学参数,并输出该无人艇在不同运动模式下的姿态参数。
54.进一步的,所述对无人艇状态参数进行模拟,包括:
55.针对柴油机动力及电动两类无人艇,构建热力学方程及iv变化曲线,模拟传感器的采集功能,输出不同工况及特定故障下的无人艇核心部件状态参数。
56.进一步的,所述对无人艇故障参数进行仿真,包括:
57.基于上述的状态参数仿真,对各类故障的成因及外在表现进行分析,模拟输出不同故障下的无人艇核心部件热力学参数。
58.进一步的,所述对影响无人艇运行的环境参数进行模拟并输出,包括:
59.针对任务过程中的无人艇,对海风强度、阻尼系数、海浪强度、频率等影响无人艇运行的环境参数进行模拟并输出。
60.需要说明的是,无人艇模拟器的首要任务是建立单艇的运动学模型,无人艇单艇的运动学模型是满足无人艇多源状态感知需求仿真与模拟测试的基础。本发明实施例采用分离型建模方法建立无人艇运动学模型。
61.具体的,如图2所示,按作用力的性质,可将无人艇在静水中航行的受力分为:重力g、静浮力p0、水动压力pd、惯性水动阻力ra、粘性水动阻力rv、兴波阻力rw、飞沫阻力rf和动力推进力t。除此以外,实际海况下航行的滑无人艇还应考虑风、浪、流等环境干扰力的影响。
62.根据对无人艇运动和受力的分析结果,首先建立描述无人艇运动的固定坐标系和随动坐标系及其转换关系,其次根据动量动力和动量矩定理,推导出无人艇六自由度空间运动方程,利用分离型建模方法建立六自由度运动模型。
63.在故障参数仿真部分中,以无人艇动力系统为对象,分析其设备本身的原动机、发电机或蓄电池以及控制设备故障,恶劣环境影响绝缘降低等故障,短路、负载过载意外事故等故障,引起系统频率异常、温度异常和流量异常等健康状态变化,进行故障的仿真模拟。
64.在总结各类故障表现形式的基础上,结合柴油机台架试验数据,进行各类故障状态下的柴油机热力学参数模拟及输出。针对电动力无人艇模拟器,通过控制上位机结合电源模拟器来模拟无人艇电机的故障情况,模拟输出电机在各类故障下的i-v曲线,达到故障仿真的目的。
65.进一步的,该方法还包括:
66.建立多艇通讯接口同步模拟、运行环境接口交互模拟等模块组成的艇群状态空间模拟器,可以模拟水面无人艇集群正常运行和单艇发生故障时的多艇间的信息交互和同步,满足单艇性能降级、单艇故障退出等艇群不同运行状态下的感知模拟需求。
67.艇群状态空间模拟器主要包括无人艇间的通信和数据交互。数据交互采用udp协议进行发送和接收,交互命令包括初始化、航迹点、目标、命令和故障等类型。
68.在实际应用中,可通过设计一个可视化仿真系统来实现水面无人艇群体智能学习模拟器的设计。
69.所述可视化仿真系统包括:上位机试验控制模块、无人艇状态仿真模块和可视化模块。所述上位机试验控制模块管理整个仿真过程。
70.具体的,所述上位机试验控制模块用于订阅系统广播的消息,包括艇的数量、每条艇的初始速度、每时刻每条艇的位置(航迹规划子系统以10hz的频率广播,需要上位机试验控制模块订阅并解算发送到显示系统)、海岛出现的时间、民船出现的时间等。
71.所述上位机试验控制模块广播如下消息:no.x号艇发生故障,每条艇的运行状态(艇号、运行起始时间、运行结束时间、各类子系统的状态数据,如发动机的温度、转速、功率等)。
72.所述上位机试验控制模块根据广播的消息配置艇数量,并解算每条艇的位置,发
送至可视化端。可视化端接收设置后调用相应库模型,包括己方艇(油动、电动两类,需在外观上加上炮或机枪)、敌方舰艇、海岛、民船、鱼等,完成角色加载,等待上位机仿真开始指令。可视化仿真系统的原理示意图如图3所示。
73.所述可视化模块用于根据接收到所述上位机试验控制模块发送的设置信息调用相应库模型,完成角色加载,并等待上位机仿真开始指令;
74.所述无人艇状态仿真模块用于按照前文步骤s11-s13的方式对无人艇故障参数进行仿真。
75.本发明实施例的工作流程是:以无人艇单艇、无人艇集群以及地形、水面等外部环境构成的复杂动态系统为研究对象,以数字化管理、智能化维护为目标,研制无人艇单艇模拟器、艇群通信模拟器以及运行环境模拟器。通过对无人艇及其运行环境进行分析,以满足无人艇多源状态感知体系研究的需求为目标,完成以下研究。
76.(1)无人艇单艇模拟器设计与实现:分析无人艇的运动学和动力学特征,研制艇体动力学模拟模块、推进系统模拟模块和环境干扰力模拟模块,实现无人艇单艇模拟器,从而模拟单艇在水面的运行状态。
77.(2)无人艇群艇状态空间模拟器设计与实现:研制无人艇多艇通信接口同步模拟模块、无人艇运行环境交互接口模拟模块,实现无人艇群艇状态空间模拟器,从而模拟无人艇群艇运行过程中的信息交互和同步。
78.下面对该方法的实施过程做进一步详细说明。
79.无人艇模拟器组成部分如下:
80.无人艇平台模拟:通过加入各类模型,模拟无人艇平台的综合动力、导航、机电以及能源等子系统功能。模拟器输入及输出参数如表1所示。
81.表1
82.[0083][0084]
(2)模拟器与其他系统的信息交互:无人艇模拟器在运行过程中与其他系统(如智能演进平台、红蓝对抗沙盒、航迹规划系统等)进行实时的数据交换。数据交互采用udp协议进行发送和接收,交互命令包括初始化、航迹点、目标、命令和故障等类型,结合实际应用场景,本方案中信息交互采用ros系统中的消息发布/订阅机制,来实现数据的上下行传输。
[0085]
(3)故障模拟及健康管理:为了验证无人艇集群系统健康管理功能的有效性,在模拟器运行过程中进行故障模拟,实时输出故障模拟数据,通过健康管理模块的分析和处理,实时捕获到无人艇的健康状态异常信息,从而对集群的任务进行调整和规划。
[0086]
根据实际使用场景,无人艇动力系统分为柴油动力和电动力两种,本方案中主要以柴油动力无人艇为例,说明故障仿真的实现过程。故障仿真过程中,根据柴油机台架实验数据,进行柴油机工作模型的标定,确保建立的柴油机模型具有较高的仿真精确性。柴油机不同负荷工作状态下的试验数据及仿真数据对比如表2所示。
[0087]
表2
[0088][0089]
在特定负荷工况下,基于建立的柴油机模型,对柴油机故障进行仿真,故障类型包括喷油器针阀磨损、堵塞、喷油过早或过迟、油管漏油等。从数值分析的角度解释故障现象,探索柴油机主要性能参数变化的规律,为诊断结果提供依据。
[0090]
主要仿真的故障类型如下:
[0091]
1)喷油器针阀磨损:当油器针阀磨损时,缸内燃烧最大温度和最大压力明显升高,故障缸的有效功率增加,这是由于当喷油器针阀磨损时,会造成燃油的滴漏现象,使喷入缸内的燃油增压,故障缸的燃烧最大温度和最大压力升高,做功增加。由于本模型柴油机有16个缸,单缸燃油消耗率增加并不能使总燃油消耗率明显增加,总燃油消耗率轻微增加。喷油器针阀磨损热力学参数变化如表3所示。
[0092]
表3
[0093][0094]
2)喷油器喷油过早:喷油器喷油过早热工参数变化率如下表所示。当故障发生时,最敏感的热工参数为最大温度和最大压力,这是因为喷油提前,燃烧起始时间也同步提前,使得缸内燃烧开始时活塞仍处于上行状态,活塞上行压缩缸内气体使得缸内最大温度和最
大压力升高,但由于缸内燃烧释放的能量有一部分用于克服活塞上行做功,使得燃油消耗率增加,同时缸内最大温度和最大压力还会使缸内机械负荷增加,容易对燃烧室部件造成损害。喷油器喷油过早热力学参数变化如表4所示。
[0095]
表4
[0096][0097]
3)喷油器喷油过迟:当故障发生时缸内最大温度和最大压力明显降低,这是因为喷油延迟使得燃烧延迟,燃烧持续期间活塞下行,使得缸内压力降低,缸内最大温度降低,同时由于缸内压力降低,燃油燃烧效果变差,最大燃烧温度和单缸有效功率降低。如果喷油时间延迟过多还会造成后燃,使得排气温度增加。热力学变化参数如表5所示。
[0098]
表5
[0099][0100]
4)油嘴堵塞:柴油机燃油杂质过多及燃烧不良时会在燃烧室内部结炭,当结炭发生在喷油器喷嘴上时会造成喷油器喷嘴结炭,使得喷油器喷油减少甚至停止喷油。当喷油器油嘴堵塞时,单缸的最大温度、最大压力及单缸有效功明显降低,这是由于喷油器油嘴堵塞会使得喷油量减少,喷油持续时间缩短,缸内燃烧释放功降低,缸内最大温度及最大压力明显降低。同时由于喷入的燃油减少,该缸的有效功率明显降低。热力学参数变化如表6所示。
[0101]
表6
[0102][0103]
5)高压油管漏油:当高压油管发生泄漏时,会造成高压油管内部的高压油压力降低,低压力的高压油进入喷油器中使得喷油器针阀开启时间变短,喷入汽缸内燃油量降低,同时低压力的高压油还会影响喷入汽缸内燃油的雾化质量,使得燃油燃烧不完全。如此就会使得缸内的最大温度和最大压力降低,单缸有效功率降低。热力学变化参数如表7所示。
[0104]
表7
[0105][0106]
6)高压油泵磨损:当高压油泵磨损时,经过高压油泵加压的燃油压力会降低,未能达到设定压力的高压油经过高压油管进入喷油器中,使得喷油器针阀开启时间缩短,喷油雾化质量降低。导致喷入汽缸内的燃油量降低,燃烧释放的能量大幅度降低,燃油燃烧不完全。缸内的最大温度和最大压力降低,单缸有效功率降低。热力学参数变化情况如表8所示。
[0107]
表8
[0108][0109]
如上所示,在总结各类故障表现形式的基础上,结合柴油机台架试验数据,进行各类故障状态下的柴油机热力学参数模拟及输出。
[0110]
(4)可视化仿真系统:为了直观形象展示无人艇任务、编队、故障状态等相关信息,本发明实施例能够实现无人艇可视化展示,该系统通过对无人艇及目标的三维模型构建,通过实时轨迹输入的方式进行航迹规划,以直观、立体、多角度的方式全面展现无人艇集群任务过程中的相关信息,具体工作流程如图4所示。仿真开始前的准备阶段,上位机向可视化模块发送以下信息:艇编号、艇初始坐标。可视化模块接收设置后调用相应艇模型,完成角色加载,等待上位机仿真开始指令。
[0111]
仿真开始后,可视化模块根据解算的每条艇的航迹位置信息,演示正常状态下编队行进场景,并等待上位机发送如下指令。
[0112]
比如,艇群侦察到民船或敌舰艇时,上位机通知可视化模块,可视化模块实时加载相应模型,将岛民船或敌舰艇显示在画面的相应位置上;又比如,当某条艇出现故障,上位机实时向可视化端发送故障信息,可视化模块根据接收信息启动相应状态显示。
[0113]
仿真结束时,上位机通知可视化模块,结束仿真程序。
[0114]
本发明实施例所述的水面无人艇群体智能学习模拟器设计方法,通过对无人艇单艇运动学建模、无人艇群艇信息同步模块设计以及无人艇运行环境状态空间建模,实现了无人艇的动力、通信、卫星定位子系统、群艇信息同步以及运行环境等多源状态感知模拟需求。,有助于对无人艇系统的开发以及提高无人艇系统的安全性。
[0115]
图5是本发明一种水面无人艇群体智能学习模拟器仿真系统一个实施例提供的结构示意图。
[0116]
如图5所示,本发明实施例所述的一种水面无人艇群体智能学习模拟器仿真系统,包括:
[0117]
上位机试验控制模块51、无人艇状态仿真模块52和可视化模块53;
[0118]
所述上位机试验控制模块51,用于订阅系统广播的消息,还用于向系统广播如下消息:no.x号艇发生故障,以及每条艇的运行状态;还用于根据广播的消息配置艇数量,并
解算每条艇的位置,形成设置信息,并发送至所述可视化模块;
[0119]
所述可视化模块53用于根据接收到的设置信息调用相应库模型,完成角色加载,并等待上位机仿真开始指令;
[0120]
所述无人艇状态仿真模块52用于对无人艇故障参数进行仿真。所述无人艇状态仿真模块52为图3中的故障仿真模块。
[0121]
本发明实施例所述的一种水面无人艇群体智能学习模拟器仿真系统的工作原理请参见前文描述,在此不再赘述。
[0122]
此外,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如前面所述的水面无人艇群体智能学习模拟器设计方法。
[0123]
可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
[0124]
需要说明的是,在本发明的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本发明的描述中,除非另有说明,“多个”的含义是指至少两个。
[0125]
流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本发明的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本发明的实施例所属技术领域的技术人员所理解。
[0126]
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
[0127]
本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
[0128]
此外,在本发明各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。
[0129]
上述提到的存储介质可以是只读存储器,磁盘或光盘等。
[0130]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何
的一个或多个实施例或示例中以合适的方式结合。
[0131]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
