1.本发明涉及一种触觉回馈系统。更具体地来说,本发明尤其涉及一种具 有感测模块的触觉回馈系统。
背景技术:
2.一般手机或平板电脑等电子装置内部通常设有震动器,借以提供使用者 适当的触觉回馈。
3.然而,随着感测器技术的日新月异,如何能提供使用者更加丰富且准确 的触觉回馈始成为此技术领域研发人员的一重要挑战。
技术实现要素:
4.有鉴于前述公知问题点,本发明的一实施例提供一种触觉回馈系统,设 置于一电子装置上,前述触觉回馈系统包括一固定部、一活动部以及一驱动 组件。前述固定部固定于前述电子装置上,前述活动部可相对前述固定部运 动,前述驱动组件可用以驱使前述活动部相对前述固定部运动并产生一回馈 力。
5.于一实施例中,前述电子装置还包括一中央处理单元(cpu)以及一感测 模块,其中前述感测模块设置于前述触觉回馈系统之外,用以输出一第一感 测信号至前述中央处理单元。
6.前述触觉回馈系统还包括一控制单元,用以输出一控制信号至前述驱动 组件,从而通过前述驱动组件驱使前述活动部相对前述固定部运动。其中, 前述中央处理单元输出一指令信号至前述控制单元,以调整前述控制单元至 一特定的控制模式;其中,前述感测模块更输出一第二感测信号至前述控制 单元,且前述第二感测信号未通过前述中央处理单元。
7.于一实施例中,前述固定部包括一外框以及连接前述外框的一底座,前 述驱动组件以及前述活动部设置于前述外框内,前述感测模块以及前述控制 单元设置于前述外框的外部,且前述感测模块固定地连接前述固定部。
8.于一实施例中,前述感测模块设置于前述电子装置的一板状构件上,且 前述固定部固定地连接前述板状构件,其中前述触觉回馈系统经由一电路组 件电性连接至前述感测模块,且前述电路组件设置于前述板状构件上。
9.于一实施例中,一外部测量装置通过测量前述活动部的运动以及前述第 二感测信号而产生前述活动部的运动信息相对于前述第二感测信号的一第 一关系曲线。
10.于一实施例中,前述外部测量装置根据前述第一关系曲线而调整前述控 制单元的一特性参数。
11.于一实施例中,前述触觉回馈系统还包括一感测元件,设置于前述固定 部内或者前述固定部上,用以感测前述活动部的运动并输出一第三感测信号 到前述控制单元,其中前述控制单元根据前述第二、第三感测信号输出前述 控制信号,且前述感测元件设置于前
述固定部内。
12.于一实施例中,一外部测量装置通过测量前述活动部的运动以及前述第 二感测信号而产生前述活动部的运动信息相对于前述第二感测信号的一第 一关系曲线,且前述外部测量装置更通过测量前述活动部的运动以及前述第 三感测信号而产生前述活动部的运动信息相对于前述第三感测信号的一第 二关系曲线。
13.于一实施例中,前述外部测量装置根据前述第一、第二关系曲线而调整 前述控制单元的一特性参数。
14.于一实施例中,前述感测元件包含一霍尔效应传感器。
15.于一实施例中,前述中央处理单元根据前述第一感测信号输出前述指令 信号至前述控制单元,且前述控制单元根据前述指令信号输出前述驱动信号 至前述驱动组件。
16.于一实施例中,前述控制单元根据前述指令信号以及前述第二感测信号 输出前述驱动信号至前述驱动组件。
17.于一实施例中,前述触觉回馈系统根据前述第二感测信号而对前述活动 部的运动进行闭回路控制。
18.于一实施例中,当前述第二感测信号符合一第一预设条件时,前述控制 单元通过前述驱动组件驱使前述活动部以一第一模式运动,且当前述第二感 测信号符合一第二预设条件时,前述控制单元通过前述驱动组件驱使前述活 动部以一第二模式运动。
19.于一实施例中,前述驱动组件包含设置在前述固定部上的一线圈以及设 置在前述活动部上的一磁铁。
20.于一实施例中,前述感测模块包含一光学手指导航感测器、一陀螺仪、 一加速度计、一触摸开关、一指纹感测器、一压力感测器、一声波感测器、 一气体感测器、一温度感测器或一特定气体浓度感测器。
21.于一实施例中,前述感测模块构成前述电子装置的一使用者界面的至少 一部分。
22.于一实施例中,前述第二感测信号相异于前述第一感测信号。
23.于一实施例中,前述第二感测信号相同于前述第一感测信号。
24.于一实施例中,前述固定部、前述活动部以及前述驱动组件构成前述电 子装置内部的一线性谐振致动器的至少一部分。
附图说明
25.本公开可通过之后的详细说明并配合图示而得到清楚的了解。要强调的 是,按照业界的标准做法,各种特征并没有按比例绘制,并且仅用于说明的 目的。事实上,为了能够清楚的说明,因此各种特征的尺寸可能会任意地放 大或者缩小。
26.图1表示本发明一实施例的电子装置的示意图。
27.图2表示设置于图1中的电子装置内部的触觉回馈系统以及感测模块的 示意图。
28.图3表示电子装置内部的触觉回馈系统、感测模块以及中央处理单元 (cpu)之间的功能方块图(function block diagram,fbd)。
29.图4表示通过外部测量装置所测量到的震子的运动信息相对于第二感测 信号的一第一关系曲线不同于第一目标曲线的示意图。
30.图5表示本发明另一实施例的电子装置内部的触觉回馈系统以及感测模 块的示
意图。
31.图6表示本发明另一实施例的电子装置内部的触觉回馈系统、感测模块 以及中央处理单元(cpu)之间的功能方块图。
32.图7表示通过外部测量装置所测量到的震子的运动信息相对于第三感测 信号的一第二关系曲线不同于第二目标曲线的示意图。
33.图8显示根据本公开的某些特点的光学元件驱动机构的爆炸图。
34.图9a为根据本公开的某些特点的光学元件驱动机构的立体图。
35.图9b为根据本公开的某些特点的光学元件驱动机构的底视图。
36.图10a为根据本公开的某些特点的底座的底视图。
37.图10b为根据本公开的某些特点的第一承载件的底视图。
38.图11a为根据本公开的某些特点的光学元件驱动机构的剖面图。
39.图11b为根据本公开的某些特点的框架的剖面图。
40.图11c为根据本公开的某些特点的框架的立体图。
41.图12为根据本公开的某些特点的框架、第一磁性元件、第二磁性元件、 第三磁性元件、第二电路组件以及第二感测元件的立体图。
42.图13为根据本公开的某些特点单独显示的第二电路组件、第二感测元 件以及强化组件的立体图。
43.图14为根据本公开的某些特点显示第一吸震元件、第二吸震元件、第 三吸震元件以及第四吸震元件的示意图。
44.图15为根据本公开的某些特点以虚线显示内埋在第三电路组件的第一 线圈以及第三线圈的立体图。
45.图16a为根据本公开的某些特点显示的第二承载件、第二线圈以及第二 感测组件的立体图。
46.图16b为根据本公开的某些特点显示的第二承载件、第二线圈以及第二 感测组件的俯视图。
47.图17a为根据本公开的某些特点单独显示的第一驱动组件、第二驱动组 件以及第三驱动组件的立体图。
48.图17b为根据本公开的某些特点单独显示的第一驱动组件、第二驱动组 件以及第三驱动组件的俯视图。
49.图18a为根据本公开的某些特点的第一承载件、第一光学元件、第一电 路组件、第三电路组件、第四电路组件、底座、连接部以及导磁性元件的剖 面图。
50.图18b为根据本公开的某些特点的沿着图18a中的虚线2-a到2-a’所 提取的剖面图。
51.图18c为根据本公开的某些特点的单独显示第一驱动组件、第二驱动组 件以及第三驱动组件的俯视图。
52.图19为根据本公开的另一个实施例所显示的光学元件驱动机构的爆炸 图。
53.图20a为根据本公开的某些特点的显示图19的光学元件驱动机构的立 体图,但为了说明用途,未显示外框。
54.图20b为根据本公开的某些特点的显示图19的光学元件驱动机构的立 体图,但为
了说明用途,未显示外框。
55.图21a示出出本公开一些实施例的光学模块的示意图。
56.图21b是图21a中一些元件的示意图。
57.图21c是本公开一些实施例的光学模块的示意图。
58.图21d是图21c中一些元件的示意图。
59.图22a是光量调整机构的示意图。
60.图22b是光量调整机构的爆炸图。
61.图23a是光量调整机构一些元件的示意图。
62.图23b是光量调整机构一些元件的俯视图。
63.图23c是光量调整机构一些元件的俯视图。
64.图23d是光量调整机构一些元件的俯视图。
65.图24a至图24c是光量调整机构一些元件位置关系的示意图。
66.图25a至图25c是光量调整机构一些元件位置关系的示意图。
67.图26是本公开一些实施例的光量调整机构的示意图。
68.图27示出根据一些实施例,光学元件驱动机构的爆炸视图。
69.图28示出根据一些实施例,光学元件驱动机构的立体图。
70.图29示出根据一些实施例,光学元件驱动机构的俯视图,其中省略外 框以及第一活动部。
71.图30示出根据一些实施例,光学元件驱动机构的主视图,其中省略外 框以及第一活动部。
72.图31示出根据一些实施例,光学元件驱动机构的俯视图,其中省略外 框。
73.图32示出根据一些实施例,光学元件驱动机构的左视图。
74.图33示出根据本公开一些实施例的触觉回馈系统的立体图。
75.图34示出根据本公开一些实施例的触觉回馈系统的爆炸图。
76.图35示出根据本公开一些实施例的触觉回馈系统的内部结构的立体图。
77.图36示出根据本公开一些实施例的触觉回馈系统的内部结构的俯视图。
78.图37示出根据本公开一些实施例的模态调整组件的框架的仰视图。
79.图38示出根据本公开一些实施例的触觉回馈系统沿图33所示的线 5-a-5-a的剖视图。
80.图39示出根据本公开一些实施例的调整元件的立体图。
81.图40示出根据本公开一些实施例的调整元件沿图35所示的线5-b-5-b 的剖视图。
82.图41为根据本公开一实施例的触觉回馈系统的立体图。
83.图42为根据本公开一实施例的触觉回馈系统的爆炸图。
84.图43为沿图41中6-a-6-a线段切开的触觉回馈系统的剖面图。
85.图44为根据本公开一实施例的触觉回馈系统的部分元件的示意图。
86.图45为根据本公开一实施例的触觉回馈系统的部分元件的示意图。
87.附图标记如下:
88.1-1:触觉回馈系统
89.1-11:固定部
90.1-111:外框
91.1-112:底座
92.1-12:震子
93.1-13:控制单元
94.1-14:电路组件
95.1-15:感测元件
96.1-2:感测模块
97.1-c:中央处理单元
98.1-c1:指令信号
99.1-e:电子装置
100.1-e0:壳体
101.1-e1:屏幕
102.1-r1:第一关系曲线
103.1-r1’:第一目标曲线
104.1-r2:第二关系曲线
105.1-r2’:第二目标曲线
106.1-s1:第一感测信号
107.1-s2:第二感测信号
108.1-s3:第三感测信号
109.2-1:第一光学元件
110.2-10,2-10’:光学元件驱动机构
111.2-100:固定部
112.2-110,2-110’:外框
113.2-120,2-120’:框架
114.2-121:第一侧边
115.2-122:第二侧边
116.2-123:角落
117.2-124:第一容纳空间
118.2-125:第二容纳空间
119.2-126:第三容纳空间
120.2-127:框架突出部
121.2-1271:第一框架表面
122.2-1272:第二框架表面
123.2-128:内壁
124.2-1280:内表面
125.2-130:底座
126.2-131:第三开口
127.2-132:止动部
128.2-140:第二电路组件
129.2-141:第一部分
130.2-142:第二部分
131.2-200:第一活动部
132.2-210:第一承载件
133.2-211:第一开口
134.2-212:回避部
135.2-213:凹部
136.2-220:第一电路组件
137.2-230:第三电路组件
138.2-240:第四电路组件
139.2-300:第二活动部
140.2-310:第二承载件
141.2-400:连接部
142.2-500:第一驱动组件
143.2-501:第一磁性元件
144.2-502:第一线圈
145.2-5022:第一段部
146.2-510:第二驱动组件
147.2-511:第二磁性元件
148.2-512:第二线圈
149.2-5122:第二段部
150.2-520:第三驱动组件
151.2-521:第三磁性元件
152.2-522:第三线圈
153.2-5222:第三段部
154.2-600,2-600’:第一支撑组件
155.2-601,2-601’:支撑元件
156.2-650:第二支撑组件
157.2-651:第一弹性元件
158.2-652:第二弹性元件
159.2-700:感测组件
160.2-710:第一感测元件
161.2-720:第二感测元件
162.2-730:感测磁铁
163.2-d1:主轴
164.2-d2:第二轴
165.2-d3:第三轴
166.2-s1:第一轴
167.2-s2:轴
168.2-o1:第一光轴
169.2-o2:第二光轴
170.3-1001,3-1002:光学模块
171.3-1100,3-2100:光量调整机构
172.3-1110:固定部
173.3-1111:外框
174.3-1112,3-2112:底座
175.3-1113,3-2113:顶板
176.3-1114:第一挡止部
177.3-1115:第二挡止部
178.3-1116:第一表面
179.3-1117:第二表面
180.3-1120,3-2120:活动部
181.3-1121:第一引导部
182.3-1122:第二引导部
183.3-1123:第三引导部
184.3-1124:第四引导部
185.3-1130,3-2300:容纳空间
186.3-1140,3-2140:光量控制元件
187.3-1141:第一光量控制单元
188.3-1142:第二光量控制单元
189.3-1143:第三光量控制单元
190.3-1144:第四光量控制单元
191.3-1150:第一驱动组件
192.3-1151,3-2151:第一驱动元件
193.3-1152,3-2152:第二驱动元件
194.3-1160:第三弹性元件
195.3-1162,3-2162:连接元件
196.3-1164,3-2164:导磁元件
197.3-1166:位置感测元件
198.3-1171:第一定位部
199.3-1172:第二定位部
200.3-1173:第三定位部
201.3-1174:第四定位部
202.3-1175:第五定位部
203.3-1176:第六定位部
204.3-1177:第七定位部
205.3-1178:第八定位部
206.3-1181:第一导槽
207.3-1182:第二导槽
208.3-1183:第三导槽
209.3-1184:第四导槽
210.3-1191:第一定位槽
211.3-1192:第二定位槽
212.3-1193:第三定位槽
213.3-1194:第四定位槽
214.3-1195:第五定位槽
215.3-1196:第六定位槽
216.3-1200:光学元件驱动机构
217.3-1211:外壳
218.3-1212:基座
219.3-1220:承载座
220.3-1230:光学元件
221.3-1231:镜筒
222.3-1232:镜片
223.3-1240:第二驱动组件
224.3-1241:第三驱动元件
225.3-1242:第四驱动元件
226.3-1300:热能控制组件
227.3-1311,3-1312:第一热能控制元件
228.3-1313:第三接着元件
229.3-1320:第二热能控制元件
230.3-1400:第一接着元件
231.3-1500,3-2500:主轴
232.4-10:光学元件驱动机构
233.4-100:第一活动部
234.4-150:框架
235.4-200:第二活动部
236.4-210:第一承载座
237.4-300:第三活动部
238.4-310:第二承载座
239.4-330:电路组件
240.4-350:底板
241.4-400:第一驱动组件
242.4-410:驱动元件
243.4-420:传导元件
244.4-430:导电元件
245.4-500:第二驱动组件
246.4-510:第一线圈
247.4-520:第一磁性元件
248.4-550:第一感测组件
249.4-600:第三驱动组件
250.4-610:第二线圈
251.4-620:第二磁性元件
252.4-630:第二感测组件
253.4-660:第三线圈
254.4-670:第三磁性元件
255.4-680:第三感测组件
256.4-710:第一支撑组件
257.4-720:第二支撑组件
258.4-730:第三支撑组件
259.4-810:第一止动组件
260.4-820:第二止动组件
261.4-830:第三止动组件
262.4-900:固定部
263.4-901:第一侧边
264.4-902:第二侧边
265.4-910:外框
266.4-920:基座
267.4-925:容纳空间
268.4-950:第三光学元件
269.4-a1:第一轴
270.4-a2:第二轴
271.4-a3:第三轴
272.4-a4:第四轴
273.4-m:主轴
274.4-o1:第一光轴
275.4-o2:第二光轴
276.5-10:触觉回馈系统
277.5-110:外壳
278.5-120:底座
279.5-130:外框
280.5-131:第一侧壁
281.5-132:第二侧壁
282.5-140:模态调整组件
283.5-141:框架
284.5-141a:本体
285.5-141b:金属件
286.5-142:第一侧面
287.5-143:第二侧面
288.5-144:凸出部
289.5-145:止动部
290.5-146,5-147,5-148:凹槽
291.5-149:配重件
292.5-150:调整元件
293.5-151:承载座
294.5-151a:本体
295.5-151b:金属件
296.5-152:凹陷
297.5-153:斜角结构
298.5-155:配重件
299.5-160:第一连接组件
300.5-161:第一段部
301.5-162:第二段部
302.5-163:连接部
303.5-170:第二连接组件
304.5-171:第一段部
305.5-172:第二段部
306.5-173:连接部
307.5-174:延伸部
308.5-180:电路板
309.5-181:第一部分
310.5-182:第二部分
311.5-183:金属片
312.5-185:位置感测器
313.5-190:驱动组件
314.5-191:线圈
315.5-192:第一磁性元件
316.5-193:第二磁性元件
317.5-200:缓冲件
318.5-a-5-a,5-b-5-b:线
319.5-f:固定部
320.5-m:活动部
321.6-1:触觉回馈系统
322.6-100:固定部
323.6-110:上盖
324.6-111:第一面
325.6-112:第二面
326.6-113:第三面
327.6-114:第四面
328.6-115:顶面
329.6-120:底座
330.6-200:活动部
331.6-210:主体
332.6-211:第一侧
333.6-212:第二侧
334.6-213:第三侧
335.6-214:第四侧
336.6-215:第一凹陷部
337.6-216:第二凹陷部
338.6-217:第一容纳部
339.6-218:第二容纳部
340.6-220:配重元件
341.6-300:连接组件
342.6-310:第一弹性元件
343.6-311,6-321:第一段部
344.6-312,6-322:第二段部
345.6-313,6-323:第三段部
346.6-314,6-324:第一弯折部
347.6-315,6-325:第二弯折部
348.6-316,6-326:第一连结部
349.6-317,6-327:第二连结部
350.6-320:第二弹性元件
351.6-400:驱动组件
352.6-410:驱动磁铁组
353.6-411:磁性元件
354.6-411a:磁性单元
355.6-420:驱动线圈组
356.6-421:第一线圈
357.6-422:第二线圈
358.6-423:导磁元件
359.6-423a:轴部
360.6-423b:分隔部
361.6-430:导磁板
362.6-500:电路组件
363.6-510:电路板
364.6-520:ic元件
365.6-600:感测组件
366.6-610:参考元件
367.6-620:位置感测元件
368.6-700:缓冲元件
369.6-800:阻尼元件
370.6-d1:第一方向
371.6-d2:第二方向
372.6-d3:第三方向
373.6-df:驱动方向
374.6-dr1:第一模态方向
375.6-dr2:第二模态方向
376.6-dw1:第一绕线方向
377.6-dw2:第二绕线方向
378.6-h:高度
379.6-l:长度
380.6-p:镂空图案
381.6-w:宽度
382.6-θ1:第一弯曲角度
383.6-θ2:第二弯曲角度
具体实施方式
384.第一实施例
385.以下说明本发明实施例的触觉回馈系统。然而,可轻易了解本发明实施 例提供许多合适的发明概念而可实施于广泛的各种特定背景。所公开的特定 实施例仅仅用于说明以特定方法使用本发明,并非用以局限本发明的范围。
386.除非另外定义,在此使用的全部用语(包括技术及科学用语)具有与此篇 公开所属的本领域技术人员所通常理解的相同涵义。能理解的是这些用语, 例如在通常使用的字典中定义的用语,应被解读成具有一与相关技术及本公 开的背景或上下文一致的意思,而不应以一理想化或过度正式的方式解读, 除非在此特别定义。
387.有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图 的一较佳实施例的详细说明中,将可清楚的呈现。以下各实施例中所提到的 方向用语,例如:上、下、左、右、前或后等,仅是参考附加附图的方向。 因此,实施方式中所使用的方向用语是用来说明并非用来限制本发明。
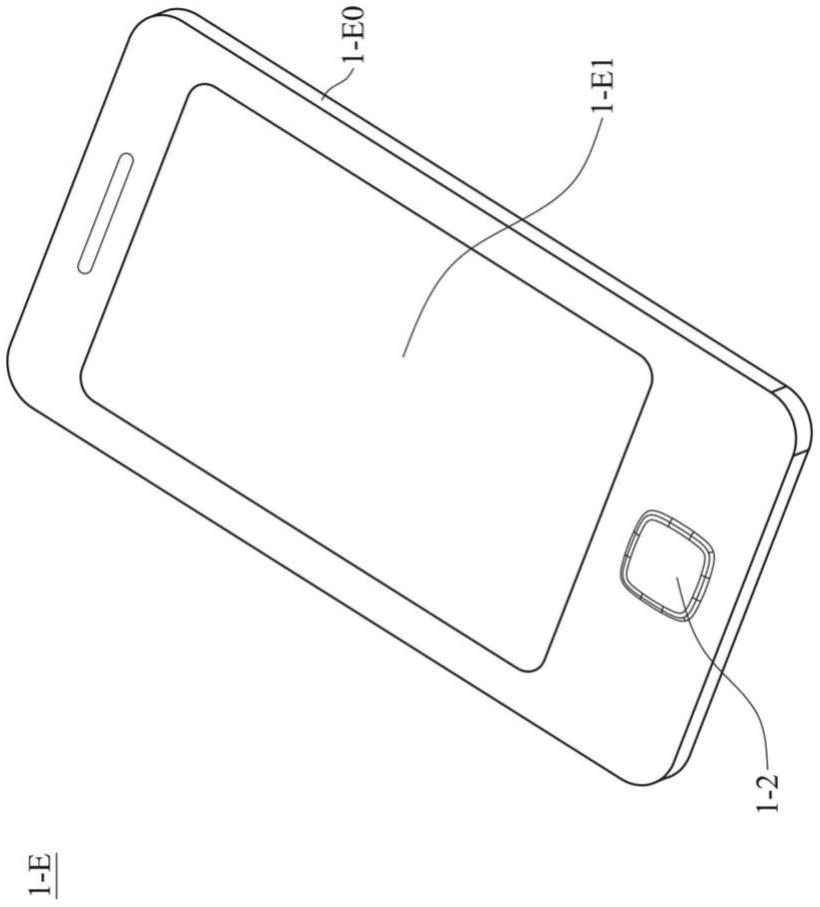
388.首先请一并参阅图1、图2、图3,其中图1表示本发明一实施例的电子 装置1-e的示意图,图2表示设置于图1中的电子装置1-e内部的触觉回馈 系统1-1以及感测模块1-2的示意图。
389.如图1、图2所示,本发明一实施例的电子装置1-e可为一移动电话、 平板电脑或其
他电子装置,且其具有一壳体1-e0以及设置于壳体中央的一 屏幕1-e1。
390.特别地是,在电子装置1-e的壳体1-e0底侧设有一感测模块1-2,其中 前述感测模块1-2可构成触控板(touch pad)或按键(button)等使用者界面(userinterface)的至少一部分。于一实施例中,前述感测模块1-2可包含光学手指 导航(optical finger navigation,ofn)感测器、陀螺仪(gyroscope)、加速度计 (accelerometer)、触摸开关(tactile switch)、指纹感测器(fingerprint sensor)、压 力感测器、声波感测器、气体感测器、温度感测器或特定气体浓度感测器等, 不以本实施例所公开者为限。
391.从图2中可以看出,在前述电子装置1-e的壳体1-e0内部另设有与感 测模块1-2连接的一触觉回馈系统1-1,前述触觉回馈系统1-1主要包含有一 固定部1-11(包含外框1-111以及平板状的底座1-112)、一震子1-12(活动部)、 一控制单元1-13以及一电路组件1-14,前述外框1-111固定于电子装置1-e 的壳体1-e0内部,底座1-112则固定于外框1-111的底侧,前述震子1-12 则设置于外框1-111中,并可在外框1-111内部运动,从而能够产生一震动 信号(回馈力)。
392.应了解的是,前述感测模块1-2、电路组件1-14以及设置于电路组件1-14 上的控制单元1-13皆是固定于底座1-112上,且同样是位在外框1-111的外 部。其中感测模块1-2以及控制单元1-13可通过电路组件1-14而与电子装 置1-e内部的一中央处理单元电性连接。
393.于一实施例中,前述感测模块1-2也可以设置在电子装置1-e内部的其 他位置,例如可设置在电子装置1-e的壳体1-e0上,或者设置在壳体1-e0 内部的电路板(未图示)或其他板状构件上;另一方面,前述外框1-111以及 电路组件1-14也可以固定在前述壳体1-e0或壳体1-e0内部的电路板等板状 构件上,而不以本实施例所公开者为限。
394.具体而言,前述控制单元1-13可包含控制器ic,且其可经由电路组件 1-14输出一控制信号到外框1-111内部的一驱动组件(未图示),从而可通过 前述驱动组件驱使震子1-12(活动部)相对外框1-111(固定部)震动。
395.在本实施例中,前述驱动组件可包含设置在外框1-111上的线圈以及设 置在震子1-12上的磁铁,且当线圈被施加一电流(控制信号)时,即可驱使震 子1-12相对外框1-111运动。举例而言,前述固定部1-11、震子1-12(活动 部)以及驱动组件可构成电子装置1-e内部的一震动器或线性谐振致动器 (linear resonant actuators,lra)的至少一部分。
396.接着请参阅图3,其中图3表示电子装置1-e内部的触觉回馈系统1-1、 感测模块1-2以及中央处理单元1-c(cpu)之间的功能方块图(function blockdiagram,fbd)。
397.如图3所示,前述感测模块1-2例如可感测电子装置1-e的姿态、移动 速度、加速度或者使用者的接触/按压,同时可据以输出一第一感测信号1-s1 到电子装置1-e内部的一中央处理单元1-c;接着,中央处理单元1-c可根 据该第一感测信号1-s1而输出一指令信号1-c1至控制单元1-13,以调整或 改变该控制单元1-13到一特定的控制模式(例如当感测模块1-2感测到电子 装置1-e处于不同姿态时,使震子1-12产生不同振幅的震动)。如此一来, 控制单元1-13即可根据该指令信号1-c1而输出不同模式的控制信号到前述 驱动组件,以提供使用者不同型态的触觉回馈。
398.此外,该感测模块1-2更可根据其所感测到的电子装置1-e的姿态、移 动速度或加速度而另外输出一第二感测信号1-s2到控制单元1-13,且该第 二感测信号1-s2并未通过
中央处理单元1-c。在本实施例中,前述第二感测 信号1-s2可以相同或相异于第一感测信号1-s1。
399.需特别说明的是,前述控制单元1-13可根据前述指令信号1-c1以及第 二感测信号1-s2而输出控制信号到外框1-111内部的驱动组件(例如设置于 外框1-111上的线圈),借以驱使震子1-12相对于外框1-111产生震动,从而 能够提供使用者适当的触觉回馈。
400.图4表示通过外部测量装置所测量到的震子1-12的运动信息相对于第 二感测信号1-s2的一第一关系曲线1-r1不同于第一目标曲线1-r1’的示意 图。
401.在本实施例中,可通过一外部测量装置(未图示)测量震子1-12相对于外 框1-111的运动(例如位移量、速度或加速度),并根据该运动以及感测模块 1-2所产生的第二感测信号1-s2而得到震子1-12的运动信息相对于前述第 二感测信号1-s2的一第一关系曲线1-r1(图4)。
402.应了解的是,由于感测模块1-2在组装后并未经过适当的校正程序,因 此前述第一关系曲线1-r1可能会与一第一目标曲线1-r1’产生误差,此时 外部测量装置则可根据该第一关系曲线1-r1来调整控制单元1-13的特性参 数,以提升震子1-12相对于外框1-111的运动控制精度,且前述校正可不需 要经过中央处理单元1-c。
403.需特别说明的是,在完成前述校正程序后,触觉回馈系统1-1便能够根 据前述第二感测信号1-s2而对震子1-12的运动或振幅进行精准的闭回路控 制,以提供使用者适当且准确的触觉回馈。
404.再请一并参阅图5、图6、图7,其中图5表示本发明另一实施例的电子 装置1-e内部的触觉回馈系统1-1以及感测模块1-2的示意图,图6表示本 发明另一实施例的电子装置1-e内部的触觉回馈系统1-1、感测模块1-2以 及中央处理单元1-c(cpu)之间的功能方块图,图7表示通过外部测量装置 所测量到的震子1-12的运动信息相对于第三感测信号1-s3的一第二关系曲 线1-r2不同于第二目标曲线1-r2’的示意图。
405.图5~图7的实施例与图2~图4的主要差别在于:本实施例的外框1-111 内部更设有一感测元件1-15(图5),用以感测震子1-12相对于外框1-111的 运动,并且可据以输出一第三感测信号1-s3到控制单元1-13(图6)。
406.然而,前述感测元件1-15也可以直接设置在外框1-111或底座1-112上, 并不以本实施例所公开者为限。举例而言,前述感测元件1-15可以是霍尔 效应传感器(hall sensor)。
407.如图6所示,前述控制单元1-13可根据指令信号1-c1、第二感测信号 1-s2以及第三感测信号1-s3而输出一控制信号到外框1-111内部的驱动组 件,从而可通过前述驱动组件驱使震子1-12相对于外框1-111产生震动,以 提供使用者适当的触觉回馈。
408.在本实施例中,更可通过一外部测量装置(未图示)测量震子1-12相对于 外框1-111的运动(例如位移量或加速度值),并根据该运动以及前述感测元 件1-15所产生的第三感测信号1-s3而得到震子1-12的运动信息相对于前述 第三感测信号1-s3的一第二关系曲线1-r2(图7)。
409.由于触觉回馈系统1-1在组装后并未经过适当的校正程序,因此前述第 二关系曲线1-r2可能会与一第二目标曲线1-r2’产生误差,此时外部测量 装置则可根据前述第一关系曲线1-r1以及该第二关系曲线1-r2来调整控制 单元1-13的特性参数,以进一步强化震
子1-12相对于外框1-111的运动控 制精度,且前述校正可不需要经过中央处理单元1-c。
410.需特别说明的是,在完成前述校正程序后,触觉回馈系统1-1便能够根 据前述第二感测信号1-s2以及第三感测信号1-s3而对震子1-12的运动或振 幅进行精准的闭回路控制,以提供使用者适当且准确的触觉回馈。
411.举例而言,当感测模块1-2包含陀螺仪及/或加速度计时,可用以感测电 子装置1-e的姿态,而当感测模块1-2所产生的第二感测信号1-s2符合一第 一预设条件时(例如感测模块1-2检测到电子装置1-e的姿态朝上),控制单 元1-13可通过驱动组件驱使震子1-12以一第一模式运动(例如连续震动); 同理,当感测模块1-2所产生的第二感测信号1-s2符合一第二预设条件时(例 如感测模块1-2检测到电子装置1-e的姿态朝下),控制单元1-13则可通过 驱动组件驱使震子1-12以一第二模式运动(例如间歇性震动),以提供使用者 不同的触觉回馈。
412.第二实施例
413.以下说明本发明实施例的光学元件驱动机构。然而,可轻易了解本发明 实施例提供许多合适的发明概念而可实施于广泛的各种特定背景。所公开的 特定实施例仅仅用于说明以特定方法使用本发明,并非用以局限本发明的范 围。除非另外定义,在此使用的全部用语(包括技术及科学用语)具有与此 篇公开所属的本领域技术人员所通常理解的相同涵义。能理解的是这些用 语,例如在通常使用的字典中定义的用语,应被解读成具有一与相关技术及 本公开的背景或上下文一致的意思,而不应以一理想化或过度正式的方式解 读,除非在此特别定义。
414.图8显示根据本公开的某些特点的光学元件驱动机构2-10的爆炸图。 前述光学元件驱动机构2-10可设置于例如一相机、平板电脑或手机等电子 装置的内部,以获取图像。前述光学元件驱动机构2-10可使设置于其中的 第一光学元件2-1以及第二光学元件(未显示)两者相对移动,以达到自动 对焦(auto-focusing,af)与光学防手震(optical image stabilization,ois) 的目的。以下将说明光学元件驱动机构2-10的详细结构。
415.如图8所显示,光学元件驱动机构2-10包括一固定部2-100、一第一活 动部2-200、一第二活动部2-300、一连接部2-400、一第一驱动组件2-500、 一第二驱动组件2-510、一第三驱动组件2-520、一第一支撑组件2-600、一 第二支撑组件2-650、一感测组件2-700、一强化组件2-800(显示在图13)、 三个导磁性元件2-900(显示在图18a到图18c)、一第一吸震元件2-1000 (显示在图14)、一第二吸震元件2-1010(显示在图14)、一第三吸震元件 2-1020(显示在图14)以及一第四吸震元件2-1030(显示在图14)。
416.固定部2-100包括一外框2-110、一框架2-120、一底座2-130。外框2-110 具有板状结构,且固定地连接框架2-120。底座2-130固定地连接框架2-120。 有关框架2-120的细节将在图11a到图11c详细说明。此外,第一活动部 2-200包括一第一电路组件2-220。固定部2-100还包括一第二电路组件 2-140。
417.第一电路组件2-220具有板状结构。第二电路组件2-140设置在框架 2-120上。第二电路组件2-140包括一第一部分2-141以及一第二部分2-142。 第一部分2-141以及第二部分2-142皆具有板状结构,且第一部分2-141以 及第二部分2-142互不平行。
418.第一活动部2-200还包括一第一承载件2-210、一第三电路组件2-230 以及一第四电路组件2-240。第一承载件2-210固定地连接第一电路组件 2-220。第二活动部2-300包括
一第二承载件2-310。
419.第一承载件2-210用以连接一第一光学元件2-1,第二承载件2-310用以 连接一第二光学元件(未显示)。在本实施例中,第一光学元件2-1用以接 收电磁波,且输出信号。第一光学元件2-1以及第二光学元件可为感光元件、 镜头、镜片等等的光学元件。
420.第一光学元件2-1具有一第一光轴2-o1,第二光学元件具有一第二光轴 2-o2。在本实施例中,第一光轴2-o1、第二光轴2-o2以及一主轴2-d1大 致上平行。当沿着第一光轴2-o1观察时,第一光学元件2-1与第一电路组 件2-220至少部分重叠。第一光学元件2-1电性连接第一电路组件2-220。
421.第三电路组件2-230以及第四电路组件2-240皆具有板状结构。第三电 路组件2-230设置于第四电路组件2-240上。第三电路组件2-230经由第四 电路组件2-240电性连接至第一电路组件2-220。
422.光学元件驱动机构2-10可通过第一活动部2-200相对固定部2-100的运 动达到防手震的效果。光学元件驱动机构2-10可通过第二活动部2-300相对 固定部2-100的运动达到自动对焦的效果。
423.当来自外界的光线进入承载第一光学元件2-1以及第二光学元件(未显 示)的光学元件驱动机构2-10时,入射的光线从光入射端(靠近外框)沿 着第二光学元件的第二光轴穿过设置于光学元件驱动机构2-10之中的第二 光学元件至光出射端,并至第一光学元件2-1,以获取图像。连接部2-400 用以将第一电路组件2-220连接到一外部电路(未显示),其中第一电路组 件2-220或是连接部2-400可通过可挠性印刷电路板或是tsa 技术连接到 外部电路。
424.第一驱动组件2-500包括四个第一磁性元件2-501以及四个第一线圈 2-502。第二驱动组件2-510包括四个第二磁性元件2-511以及四个第二线圈 2-512。第三驱动组件2-520包括两个第三磁性元件2-521以及两个第三线圈 2-522。
425.第一磁性元件2-501以及第二磁性元件2-511具有一体化结构,也就是 说第一磁性元件2-501以及第二磁性元件2-511并非单独的两个元件,第一 磁性元件2-501同时是第二磁性元件2-511。如此一来,可降低光学元件驱 动机构2-10的体积,以达到小型化。
426.第一磁性元件2-501、第二磁性元件2-511以及第三磁性元件2-521设置 在框架2-120。第一线圈2-502以及第三线圈2-522内埋于第三电路组件 2-230。第二线圈2-512设置在第二承载座2-310。
427.第一驱动组件2-500电性连接第一电路组件2-220。第二驱动组件2-510 电性连接第二电路组件2-140。第一驱动组件2-500用以驱动第一承载件 2-210相对于框架2-120于一第一维度移动。第一维度为在一第二轴2-d2以 及一第三轴2-d3所形成的平面的移动。第二驱动组件2-510用以驱动第二 承载件2-310相对于框架2-120于一第二维度移动。第二维度为沿着第二光 轴2-o2的移动。
428.本公开的其中一个特点在于,本公开的光学元件驱动机构2-10包括第 三驱动组件2-520。第三驱动组件2-520用以驱动第一承载件2-210相对于框 架2-120于一第三维度移动。第三维度为以一转轴为轴心的转动,且此转轴 与第一光轴2-o1平行。
429.第一支撑组件2-600可支撑第一承载件2-210相对框架2-120运动。第 一支撑组件2-600包括四个支撑元件2-601。在本实施例中,四个支撑元件 2-601皆为滚珠。
430.第二支撑组件2-650可支撑第二承载件2-310相对框架2-120运动。第 二支撑组件2-650包括一第一弹性元件2-651以及一第二弹性元件2-652。当 沿着第一光轴2-o1观察时,第一支撑组件2-600与第二支撑组件2-650部分 重叠。第二承载件2-310经由第一弹性元件2-651以及第二弹性元件2-652 活动地连接框架2-120。
431.感测组件2-700包括三个第一感测元件2-710、一个第二感测元件2-720 以及两个感测磁铁2-730。第二感测元件2-720在图8的视角中无法看到, 第二感测元件2-720在第二电路组件2-140上的配置将相关于图12到图13 描绘。
432.前述第一感测元件2-710以及第二感测元件2-720可为霍尔效应检测器 (hall effect sensor),而感测磁铁2-730可为永久磁铁。霍尔效应检测器可 通过检测永久磁铁的磁场变化,以判断永久磁铁的位置,由此增加补偿或对 焦的精度。
433.于另一实施例中,亦可使用其他类型的对位元件/组件,例如磁阻传感器 (magnetoresistive sensor,mrs)或是光学感测器(optical sensor),以检 测第一活动部2-200以及第二活动部2-300的相对位置。
434.第一感测元件2-710用以感测第一承载件2-210的运动。第一感测元件 2-710设置于第四电路组件2-240上,且电性连接第四电路组件2-240。第二 感测元件2-720用以感测第二承载件2-310的运动。第二感测元件2-720电 性连接第二电路组件2-140,且第二感测元件2-720设置于第二电路组件 2-140的第一部分2-141。
435.当在垂直于主轴2-d1的任意方向观察时,第一感测元件2-710与第二 感测元件2-720不重叠。感测磁铁2-730设置在第二承载件2-310上的相反 侧,其细节将显示在图16a到图16b。
436.图9a为根据本公开的某些特点的光学元件驱动机构2-10的立体图。在 图9a中可以看到外框2-110、框架2-120、第二电路组件2-140的第二部分 2-142、连接部2-400以及部分的底座2-130。底座2-130固定地连接到框架2-120。
437.图9b为根据本公开的某些特点的光学元件驱动机构2-10的底视图。第 一电路组件2-220电性连接连接部2-400。第一电路组件2-220固定地连接到 第一承载件2-210。
438.图10a为根据本公开的某些特点的底座2-130的底视图。图10b为根据 本公开的某些特点的第一承载件2-210的底视图。底座2-130包括一第二开 口2-131以及四个止动部2-132。底座2-130由金属材料所制成。第一承载件 2-210包括一第一开口2-211、四个回避部2-212以及四个凹部2-213。第一 承载件2-210由非金属材料所制成,例如,塑胶、玻璃纤维、或是橡胶等等。 由于在图10b的视角中无法看到凹部2-213,因此凹部2-213将相关于图11a 到图11b详细说明。
439.第一开口2-211以及第二开口2-131对应第一光学元件2-1的第一光轴 2-o1。回避部2-212为凹陷结构,用以对应止动部2-132。止动部2-132用 以限制第一承载件2-210的运动范围。
440.详而言之,止动部2-132设置在具有凹陷结构的回避部2-212内,因此 当第一承载件2-210受到第一驱动组件2-500或第三驱动组件2-520(图8) 的驱动而移动时,第一承载件2-210的移动将会受到止动部2-132的限制。
441.图11a为根据本公开的某些特点的光学元件驱动机构2-10的剖面图。 图11b为根据本公开的某些特点的框架2-120的剖面图。图11c为根据本公 开的某些特点的框架2-120
的立体图。其中,图11a以及图11b的是沿着一 第一轴2-s1观察的视角的剖面图。第一轴2-s1位在第二轴2-d2以及第三 轴2-d3所形成的平面,且第一轴2-s1和第二轴2-d2以及第一轴2-s1和第 三轴2-d3之间的夹角皆为45度,第一轴2-s1与第二轴2-d2和第三轴2-d3 之间的关系将在图17b更清楚地显示。
442.请一同参照图11a到图11c,框架2-120包括两个第一侧边2-121、两 个第二侧边2-122、四个角落2-123、一第一容纳空间2-124、一第二容纳空 间2-125、一第三容纳空间2-126、四个框架突出部2-127以及四个内壁2-128。
443.第一侧边2-121为框架2-120的相反的两个侧边,第二侧边2-122是框 架2-120的另外相反的两个侧边。第一侧边2-121沿着第二轴2-d2延伸。第 一侧边2-121与第二侧边2-122相邻且互相垂直。四个角落2-123分别位在 第一侧边2-121以及第二侧边2-122的交界处。沿着主轴2-d1观察时,第一 支撑组件2-600的支撑元件2-601分别位于框架2-120的四个角落2-123。
444.第一容纳空间2-124用以容纳第一承载件2-210。第一容纳空间2-124 邻近底座2-130。第二容纳空间2-125用以容纳第二承载件2-310以及第二光 学元件(未显示)。第三容纳空间2-126邻近外框2-110。第一弹性元件2-651 位于第三容纳空间2-126。
445.主轴2-d1通过第一容纳空间2-124、第二容纳空间2-125以及第三容纳 空间2-126。第二容纳空间2-125分别与第一容纳空间2-124以及第三容纳空 间2-126连接。当沿着第一光轴2-o1观察时,止动部2-132和第一承载件 2-210和第一电路组件2-220至少部分重叠。
446.框架突出部2-127具有一第一框架表面2-1271以及一第二框架表面 2-1272。第一框架表面2-1271以及第二框架表面2-1272面朝相反方向。第 一框架表面2-1271面朝第一容纳空间2-124。第二框架表面2-1272面朝第三 容纳空间2-126。
447.当沿着主轴2-d1观察时,第一框架表面2-1271以及第二框架表面 2-1272部分重叠。框架突出部2-127邻近第二容纳空间2-125。内壁2-128 具有一内表面2-1280,框架突出部2-127由内壁2-128突出。当沿着第一轴 2-s1观察时,框架突出部2-127与第二容纳空间2-124重叠。
448.支撑元件2-601位于框架2-120的角落2-123。当沿着主轴2-d1观察时, 第一磁性元件2-501位于角落2-123。当沿着主轴2-d1观察时,角落2-123 邻近第一侧边2-121。
449.在本实施例中,支撑元件2-601定位在凹部2-213中。支撑元件2-601 分别接触框架2-120以及第一承载件2-210,以在第一驱动组件2-500(图8) 或第三驱动组件2-520(图8)驱动第一承载件2-210时,协助第一承载件 2-210相对于框架2-120移动。
450.如图11a中所显示,止动部2-132定位于回避部2-212的凹陷结构中。 当第一活动部2-200受到第一驱动组件2-500(图8)或是第三驱动组件2-520 (图8)的驱动时,而位移到一极限位置时,回避部2-212将接触止动部2-132, 而将第一活动部2-200限制在一定的运动范围内。
451.图12为根据本公开的某些特点的框架2-120、第一磁性元件2-501、第 二磁性元件2-511、第三磁性元件2-521、第二电路组件2-140以及第二感测 元件2-720的立体图。图13为根据本公开的某些特点单独显示的第二电路 组件2-140、第二感测元件2-720以及强化组件2-800的立体图。
452.如图12中所显示,框架突出部2-127定位具有一体化结构的第一磁性 元件2-501以及第二磁性元件2-511。具有一体化结构的第一磁性元件2-501 以及第二磁性元件2-511分别位于框架2-120的角落2-123。
453.两个第三磁性元件2-521分别位于两个第一侧边2-121,虽然在图12的 视角中,仅能看到一个第三磁性元件2-521。在本实施例中,第三磁性元件 2-521设置在框架2-120上,但在不同的实施例中,第三磁性元件2-521可设 置在第二承载件2-310上或是框架2-120上。
454.第二感测元件2-720设置于第一部分2-141上。第二电路组件2-140电 性连接第二驱动组件2-510(图8)以及第二感测元件2-720。第二驱动组件 2-510经由第一弹性元件2-651(图8)电性连接第二电路组件2-140。
455.一同参照图12到图13,强化组件2-800由金属材料所制成。强化组件 2-800固定地连接框架2-120。第二驱动组件2-510经由强化组件2-800电性 连接第二电路组件2-140。在本实施例中,强化组件2-800内埋在框架2-120 中,此配置可达到小型化的功效。
456.为了说明的用途,图14为显示第一吸震元件2-1000、第二吸震元件 2-1010、第三吸震元件2-1020以及第四吸震元件2-1030的示意图。第一吸 震元件2-1000、第二吸震元件2-1010以及第三吸震元件2-1020用以抑制第 一活动部2-200的异常运动。第四吸震元件2-1030用以抑制第一活动部2-200 以及第二活动部2-300的异常运动。
457.第一吸震元件2-1000、第二吸震元件2-1010、第三吸震元件2-1020以 及第四吸震元件2-1030具有可挠性,且皆由非金属材料所制成。在本实施 例中,第一吸震元件2-1000、第二吸震元件2-1010、第三吸震元件2-1020 以及第四吸震元件2-1030可为凝胶。
458.如图14中所显示,第一吸震元件2-1000位于第一容纳空间2-124。第 一吸震元件2-1000直接接触第一活动部2-200的第三电路组件2-230以及固 定部100的框架2-120。第二吸震元件2-1010直接接触第一活动部2-200的 第一承载件2-210以及固定部100的框架2-120和底座2-130。
459.如图14中所显示,第三吸震元件2-1020位在回避部2-212的凹槽结构 中,且直接接触第一活动部2-200的第一承载件2-210和第一电路组件2-140 以及底座2-130。第四吸震元件2-1030直接接触第一活动部2-200的第三电 路组件2-230以及第二活动部2-300的第二承载件2-310。
460.图15以虚线显示内埋在第三电路组件2-230的第一线圈2-502以及第三 线圈2-522。支撑元件2-601设置在第一承载件2-210上的凹部2-213。第一 感测组件2-710设置在第四电路组件2-240上。
461.设置在框架2-120上的第一磁性元件2-501(图8)对应到设置在第三电 路组件2-230上的第一线圈2-502,以驱动第一承载件2-210(图8)在第一 维度移动。设置在框架2-120上的第三磁性元件2-521(图8)对应到设置在 第三电路组件2-230上的第三线圈2-522,以驱动第一承载件2-210(图8) 在第三维度移动。
462.图16a为根据本公开的某些特点的第二承载件2-310、第二线圈2-512 以及感测磁铁2-730的立体图。图16b为根据本公开的某些特点的第二承载 件2-310、第二线圈2-512以及第二感测组件2-730的俯视图。
463.第二线圈2-512对应到设置在框架2-120的第二磁性元件2-511(图12), 以驱动第
900对应第一磁性元件2-501。沿着主轴2-d1观察时,有两个导 磁性元件2-900位于靠近框架2-120的第一侧边2-121(图11c),而另一个 导磁性元件2-900位于靠近框架2-120的第二侧边2-142。
476.当沿着主轴2-d1观察时,导磁性元件2-900与第一驱动组件2-500至少 部分重叠。当沿着主轴2-d1观察时,导磁性元件900与第二驱动组件2-510 至少部分重叠。当沿着主轴2-d1观察时,导磁性元件2-900与第三驱动组 件2-520至少部分重叠。
477.图19为根据本公开的另一个实施例所显示的光学元件驱动机构2-10’的 爆炸图。图19所显示的光学元件驱动机构2-10’与图8所显示的光学元件驱 动机构2-10的不同之处在于其外框2-110’、框架2-120’、底座以及第一支撑 组件2-600’。
478.在图19所显示的实施例中,光学元件驱动机构2-10’的外框2-110’以及 框架2-120’的外观不同于光学元件驱动机构2-10的外框2-110以及框架 2-120,但外框2-110’和框架2-120’与外框2-110和框架2-120之间具有相似 的设置关系。此外,光学元件驱动机构2-10’没有底座。
479.除此之外,在图8所显示的实施例中,支撑元件2-601为滚珠。在图19 所显示的实施例中,支撑元件2-601’为悬吊线。第一承载件2-210经由支撑 元件2-601’可相对框架2-120’运动。
480.图20a显示图19的光学元件驱动机构2-10’的立体图,但为了说明用途, 未显示外框2-110’。图20b显示图19的光学元件驱动机构2-10’的立体图, 但为了说明用途,未显示外框2-110’。
481.如图20a到图20b中所显示,支撑元件2-601’的两端分别连接到第一 弹性元件2-651以及第一承载件2-210。支撑元件2-601’可支撑第一承载件 2-210相对框架2-120’运动。
482.综上所述,本发明提供一种光学元件驱动机构,用以驱动第一光学元件 以及第二光学元件,由此可达成光学对焦或光学晃动补偿等功能。其中通过 第一驱动组件驱动第一光学元件在垂直第一光轴的平面运动、第二驱动组件 驱动第二光学元件沿着第二光轴运动、第三驱动组件驱动第一光学元件绕第 一光轴旋转,三种驱动机制的搭配使得光学元件驱动机构具备更优良的光学 对焦与光学补偿的能力,大幅提升电子装置的性能。
483.第三实施例
484.首先,请参考图21a,其示出出本公开一些实施例的光学模块3-1001 的示意图。光学模块3-1001可主要包括光量调整机构3-1100以及光学元件 驱动机构3-1200。光学元件3-1230可设置在光学元件驱动机构3-1200中, 并且可通过光学元件驱动机构3-1200来驱动光学元件3-1230,以达成光学 防手震(optical image stabilization,ois)或自动对焦(auto focus,af)的功能。 光量调整机构3-1100可设置在光学元件驱动机构3-1200上,用以控制光线 入射至光学元件3-1230的总量或特性。举例来说,光量调整机构3-1100可 作为光圈,用以控制光学元件3-1230的景深、成像素质以及进光量。
485.在一些实施例中,光学元件3-1230例如可包括透镜(lens)、反射镜 (mirror)、棱镜(prism)、分光镜(beam splitter)、光圈(aperture)、液态镜片(liquidlens)、感光元件(image sensor)、摄像模块(camera module)、测距模块(rangingmodule)等光学元件。应注意的是,此处光学元件的定义并不限于与可见光 有关的元件,与不可见光(例如红外光、
紫外光)等有关的元件亦可包括在本 创作中。举例来说,当光学元件3-1230为一镜头时,可包括镜筒3-1231以 及至少一镜片3-1232。在一些实施例中,镜筒3-1231的材料可包括非金属 材料,且镜筒3-1231的热传导系数与承载座3-1220的热传导系数不同,例 如镜筒3-1231的热传导系数可高于承载座3-1220的热传导系数。
486.图22a是光量调整机构3-1100的示意图,图22b是光量调整机构3-1100 的爆炸图。如图21a、图22a以及图22b所示,光量调整机构3-1100主要 可包括在主轴3-1500上排列的外框3-1111、底座3-1112、顶板3-1113、活 动部3-1120、光量控制元件3-1140、第一驱动组件3-1150、第三弹性元件 3-1160、连接元件3-1162、导磁元件3-1164、位置感测元件3-1166。外框 3-1111、底座3-1112、顶板3-1113可合称为固定部3-1110。光量控制元件 3-1140可包括第一光量控制单元3-1141、第二光量控制单元3-1142、第三光 量控制单元3-1143、第四光量控制单元3-1144,或者可包括叶片、偏光片、 滤镜等光量控制元件。外框3-1111与底座3-1112形成第一容纳空间3-1130, 用以容纳活动部3-1120、第三弹性元件3-1160、连接元件3-1162、导磁元件 3-1164、位置感测元件3-1166等元件。在一些实施例中,底座3-1112较外 框3-1111靠近光学元件3-1230。光量控制元件3-1140可位在第一容纳空间 3-1130之外。
487.活动部3-1120可用以连接光量控制元件3-1140,并且可相对于固定部 3-1110运动,例如可通过连接元件3-1162可动地连接底座3-1112。第一驱 动组件3-1150可用以驱动活动部3-1120相对固定部3-1110运动。举例来说, 第一驱动组件3-1150可包括第一驱动元件3-1151、第二驱动元件3-1152, 分别设置在活动部3-1120以及固定部3-1110(例如底座3-1112)上。第一驱动 元件3-1151、第二驱动元件3-1152例如可为磁铁以及线圈的组合,用以产 生驱动力以驱动活动部3-1120相对于固定部3-1110进行运动。在一些实施 例中,第一驱动组件3-1150亦可包括压电元件、形状记忆合金等驱动元件。 导磁元件3-1164可用以引导第一驱动元件3-1151的磁场方向。在一些实施 例中,如图21a、图22b所示,第一驱动元件3-1151与第二驱动元件3-1152 可沿着主轴3-1500的方向排列,而导磁元件3-1164与第一驱动元件3-1151 也可沿着主轴3-1500的方向排列。
488.位置感测元件3-1166可用以感测第一驱动元件3-1151移动时的磁场变 化。以得到活动部3-1120相对于固定部3-1110的位置。举例来说,前述位 置感测元件3-1166例如可包括霍尔效应感测器(hall sensor)、磁阻效应感测 器(magnetoresistance effect sensor,mr sensor)、巨磁阻效应感测器(giantmagnetoresistance effect sensor,gmr sensor)、穿隧磁阻效应感测器 (tunneling magnetoresistance effect sensor,tmr sensor)、或磁通量感测器 (fluxgate sensor)。
489.在一些实施例中,光学元件驱动机构3-1200主要可包括外壳3-1211、 基座3-1212、承载座3-1220、第二驱动组件3-1240。外壳3-1211以及基座 3-1212可彼此固定而构成光学元件驱动机构3-1200的壳体,以容纳其他的 元件。承载座3-1220可相对于外壳3-1211、基座3-1212进行运动,且可用 以连接光学元件3-1230。
490.第二驱动组件3-1240可包括第三驱动元件3-1241、第四驱动元件 3-1242,分别设置在承载座3-1220以及外壳3-1211上。第三驱动元件3-1241、 第四驱动元件3-1242例如可为磁铁以及线圈的组合,用以产生驱动力以驱 动承载座3-1220相对于外壳3-1211进行运动。在一些实施例中,第二驱动 组件3-1240亦可包括压电元件、形状记忆合金等驱动元件。
1313来连接底座 3-1112与承载座3-1220,第三接着元件3-1313例如可为胶水或者焊接材料, 且第三接着元件3-1313的热传导系数与第一接着元件3-1400的热传导系数 可彼此不同。这种方式同样可以避免第一驱动组件3-1150(热源)产生的热传 导至光学元件3-1230。
498.图23a是光量调整机构3-1100一些元件的示意图,图23b是光量调整 机构3-1100一些元件的俯视图,其中主要省略了顶板3-1113。图23c是光 量调整机构3-1100一些元件的俯视图,其中主要省略了外框3-1111上的其 他元件。图23d是光量调整机构3-1100一些元件的俯视图,其中主要省略 了外框3-1111以及外框3-1111上的其他元件。
499.如图23a至图23d所示,光量控制元件3-1140的第一光量控制单元3-1141、第二光量控制单元3-1142、第三光量控制单元3-1143、第四光量控 制单元3-1144之中可构成一开口,其最大尺寸可为d1,用以允许光线通过。 此外,第一光量控制单元3-1141、第二光量控制单元3-1142、第三光量控制 单元3-1143、第四光量控制单元3-1144可以可动地连接活动部3-1120。
500.具体来说,在一些实施例中,沿着主轴3-1500观察时,第一光量控制 单元3-1141包括第一导槽3-1181,沿第一方向(y方向)延伸,第二光量控制 单元3-1142包括第二导槽3-1182,沿第一方向延伸,第三光量控制单元 3-1143包括第三导槽3-1183,沿第二方向(x方向)延伸,第四光量控制单元 3-1144包括第四导槽3-1184,沿第二方向延伸。
501.此外,活动部3-1120可包括第一引导部3-1121、第二引导部3-1122、 第三引导部3-1123、第四引导部3-1124,沿主轴3-1500延伸,且第一引导 部3-1121设置在第一导槽3-1181中,第二引导部3-1122设置在第二导槽 3-1182中,第三引导部3-1123设置在第三导槽3-1183中,第四引导部3-1124 设置在第四导槽3-1184中。
502.在一些实施例中,当活动部3-1120转动时,第一引导部3-1121、第二 引导部3-1122、第三引导部3-1123、第四引导部3-1124分别可在第一导槽 3-1181、第二导槽3-1182、第三导槽3-1183、第四导槽3-1184中滑动,以带 动第一光量控制单元3-1141、第二光量控制单元3-1142、第三光量控制单元 3-1143、第四光量控制单元3-1144在特定方向进行移动。由此,可控制开口 的大小,以达到调整光圈大小的目的。
503.在一些实施例中,第一光量控制单元3-1141还包括第一定位槽3-1191 以及第二定位槽3-1192,沿第二方向(x方向)延伸,第二光量控制单元3-1142 还包括第三定位槽3-1193以及第四定位槽3-1194,沿第二方向延伸,第三 光量控制单元3-1143还包括第五定位槽3-1195,沿第一方向(y方向)延伸, 第四光量控制单元3-1144还包括第六定位槽3-1196,沿第一方向延伸。
504.在一些实施例中,外框3-1111可包括第一定位部3-1171、第二定位部 3-1172、第三定位部3-1173、第四定位部3-1174、第五定位部3-1175、第六 定位部3-1176、第七定位部3-1177、第八定位部3-1178,沿主轴3-1500延 伸。第一定位部3-1171设置在第一定位槽3-1191中,第二定位部3-1172设 置在第二定位槽3-1192中,第三定位部3-1172设置在第三定位槽3-1193中, 第四定位部3-1174设置在第四定位槽3-1194中,第五定位部3-1175、第六 定位部3-1176设置在第五定位槽3-1195中,第七定位部3-1177、第八定位 部3-1178设置在第六定位槽3-1196中。第一定位部3-1171、第二定位部 3-1172在第二方向排列,第三定位部3-1173、第四定位部3-1174在第二方 向排列,第五定位部3-1175、第六定位部3-1176在该第一方向排列,第七 定位部3-1177、第八定位部3-1178在第一方向排列。
505.由此,可通过在特定方向排列的定位部来限制第一光量控制单元 3-1141、第二光量控制单元3-1142、第三光量控制单元3-1143、第四光量控 制单元3-1144移动的方向。举例来说,由于第一定位部3-1171、第二定位 部3-1172在第二方向排列,故第一光量控制单元3-1141的移动方向会被限 制在第二方向上。此外,还可通过第一定位部3-1171、第二定位部3-1172、 第三定位部3-1173、第四定位部3-1174、第五定位部3-1175、第六定位部 3-1176、第七定位部3-1177、第八定位部3-1178来定义第一光量控制单元 3-1141、第二光量控制单元3-1142、第三光量控制单元3-1143、第四光量控 制单元3-1144的可动范围。
506.如图23d所示,第三弹性元件3-1160可设置在底座3-1112上,且活动 部3-1120可包括凹槽3-1125,而第三弹性元件3-1160可设置在凹槽3-1125 中,并且凹槽3-1125的尺寸可大于第三弹性元件3-1160的尺寸。由此,当 活动部3-1120在顺时针或逆时针相对于固定部3-1110转动时,可通过第三 弹性元件3-1160来定义活动部3-1120的可动范围。
507.图24a至图24c分别是当活动部3-1120朝向顺时针(第一维度)转动时, 光量调整机构3-1100一些元件位置关系的示意图,其中显示出了与图23a 至图23c类似的元件。如图24a至图24c所示,当活动部3-1120朝向顺时 针转动,直到第一引导部3-1121接触外框3-1111的第一挡止部3-1114。此 时第一光量控制单元3-1141、第二光量控制单元3-1142、第三光量控制单元 3-1143、第四光量控制单元3-1144中的开口可具有尺寸3-d2,且尺寸3-d2 大于前述尺寸3-d1,以达到调整开口大小的目的。
508.图25a至图25c分别是当活动部3-1120朝向逆时针(第二维度)转动时, 光量调整机构3-1100一些元件位置关系的示意图,其中显示出了与图23a 至图23c类似的元件。如图25a至图25c所示,当活动部3-1120朝向逆时 针转动,直到第一引导部3-1121接触外框3-1111的第二挡止部3-1115。此 时第一光量控制单元3-1141、第二光量控制单元3-1142、第三光量控制单元 3-1143、第四光量控制单元3-1144中的开口可具有尺寸3-d3,且尺寸3-d3 小于前述尺寸3-d1以及尺寸3-d2,以达到调整开口大小的目的。
509.图26是本公开一些实施例的光量调整机构3-2100的示意图。在一些实 施例中,光量调整机构3-2100主要可包括在主轴3-2500上排列的框架 3-2111、底座3-2112、顶板3-2113、活动部3-2120、光量控制元件3-2140、 第一驱动元件3-2151、第二驱动元件3-2152、连接元件3-2162、导磁元件 3-2164。光量调整机构3-2100可用以取代前述光量调整机构3-1100而设置 在光学模块3-1001或光学模块3-1002中,以控制光线入射至光学元件3-1230 的总量或特性。框架3-2111、底座3-2112、顶板3-2113可构成容纳空间2300, 以容纳其他的元件。框架3-2111、底座3-2112、顶板3-2113、活动部3-2120、 光量控制元件3-2140、第一驱动元件3-2151、第二驱动元件3-2152、连接元 件3-2162、导磁元件3-2164的功能可与前述外框3-1111、底座3-1112、顶 板3-1113、活动部3-1120、光量控制元件3-1140、第一驱动元件3-1151、第 二驱动元件3-1152、连接元件3-1162、导磁元件3-1164的功能相同或相似, 于此不再赘述。
510.如图26所示,在一些实施例中,第一驱动元件3-2151与第二驱动元件 3-2152可沿着垂直主轴3-2500的方向排列,且导磁元件3-2164与第一驱动 元件3-2151也沿着垂直主轴3-2500的方向排列,且第二驱动元件3-2152可 位在导磁元件3-2164与第一驱动元件3-2151之间。由此,亦可驱动活动部 3-2120相对于框架3-2111或底座3-2112进行运动,以驱动光量控制元件 3-2140而控制光线入射至光学元件3-1230的总量或特性。
511.本公开实施例提供一种光学模块,包括承载座以及热能控制组件。承载 座用以连接光学元件。热能控制组件用以调整光学元件的温度。热能控制组 件对应光学元件或承载座。由此,可避免外界其他元件运作时的热量影响到 光学元件,并且还可达成小型化。
512.本公开所公开各元件的特殊相对位置、大小关系不但可使驱动机构达到 特定方向的薄型化、整体的小型化,另外经由搭配不同的光学模块使系统更 进一步提升光学品质(例如拍摄品质或是深度感测精度等),更进一步地利用 各光学模块达到多重防震系统以大幅提升防手震的效果。
513.第四实施例
514.本公开提供一种光学元件驱动机构,包括多个光学元件(例如:镜头、 感光元件等)。为了达成所需的光学效果,这些光学元件需要相对彼此移动。 因此,本公开的光学元件驱动机构还包括多个驱动组件,分别用于移动一或 多个光学元件。在本公开中,此等驱动组件容许光学元件在不同方向上运动 (例如:x轴、y轴、z轴方向上的平移运动及/或绕着z轴的旋转运动),达 成优良的光学效果。
515.首先,请参照图27。图27示出根据一些实施例,光学元件驱动机构4-10 的爆炸视图。如图27所示,光学元件驱动机构4-10主要包括:一第一活动 部4-100、一第二活动部4-200、一第三活动部4-300、一第一驱动组件4-400、 一第二驱动组件4-500、一第三驱动组件4-600以及一固定部4-900。在一些 实施例中,第一活动部4-100可连接一第一光学元件(例如:包括一或多个镜 片的镜头,图未示),且第二活动部4-200亦可连接第一光学元件。第三活动 部4-300可连接至一第二光学元件(例如:一感光元件,图未示)。光学元件 驱动机构4-10的各构件沿着一主轴4-m排列,且第一光学元件具有一第一 光轴4-o1,第二光学元件具有一第二光轴4-o2(图30)。在一些实施例中, 主轴4-m、第一光轴4-o1及第二光轴4-o2皆彼此平行。根据本公开的一些 实施例,第一驱动组件4-400驱动第一活动部4-100相对于固定部4-900于 一第一维度运动,第二驱动组件4-500驱动第二活动部4-200相对于固定部 4-900于一第二维度运动,且第三驱动组件4-600驱动第三活动部4-300相对 于固定部4-900于一第三维度运动。更详细而言,第二活动部4-200可相对 于第一活动部4-100运动,且第三活动部4-300可相对于第一活动部4-100 及第二活动部4-200运动。在一些实施例中,上述第三维度与上述第一维度 不同,亦与上述第二维度不同。举例来说,在一些实施例中,在第一维度上 的运动可为沿着主轴4-m方向的移动,在第二维度上的运动可为沿着第一光 轴4-o1方向的移动,且在第三维度上的运动可为在垂直第二光轴4-o2的方 向上的移动或以一第一转轴为轴心的转动,其中第一转轴与第二光轴4-o2 平行。
516.接着请一并参照图27及图28。图28示出根据一些实施例,光学元件驱 动机构4-10的立体图。本公开的光学元件驱动机构4-10还包括一第一支撑 组件4-710、一第二支撑组件4-720及一第三支撑组件4-730。第一支撑组件 4-710设置于第一活动部4-100与固定部4-900之间,且第一活动部4-100经 由第一支撑组件4-710相对于固定部4-900运动。第二支撑组件4-720设置 于第一活动部4-100与第二活动部4-200之间,且第二活动部4-200经由第 二支撑组件4-720相对于固定部4-900运动。第三支撑组件4-730设置于第 一活动部4-100与第三活动部4-300之间,且第三活动部4-300经由第三支 撑组件4-730相对于固定部4-900运动。
517.详细而言,第一支撑组件4-710包括具有长条形结构的一第一支撑元件, 固定地
设置于固定部4-900,沿着主轴4-m方向延伸,如图28所示。第一 活动部4-100具有对应第一支撑元件的孔洞,容许第一支撑元件穿过上述孔 洞,使得第一活动部4-100可相对于第一支撑元件运动。第二支撑组件4-720 包括具有可挠性以及板状结构的一或多个第二支撑元件,与第一光轴4-o1 垂直。在图28所示的实施例中,第二支撑组件4-720包括两个第二支撑元 件,分别设置于第二活动部4-200的上下两侧。在一些实施例中,第二支撑 元件可为簧片或其他适合的弹性材质,且可具有任何适合的形状。第二活动 部4-200经由第二支撑元件可动地连接第一活动部4-100。第三支撑组件 4-730包括具有可挠性以及长条形结构的一或多个第三支撑元件。在图28所 示的实施例中,第三支撑组件4-730包括四个第三支撑元件,分别设置于第 一活动部4-100的四个角落,沿着第二光轴4-o2方向延伸。在一些实施例 中,第三支撑元件可为吊环线(suspension wires)。第三活动部4-300经由第 三支撑元件可动地连接第一活动部4-100。在一些其他实施例中,第三支撑 元件可具有球形结构,通过将滚珠设置于第一活动部4-100与第三活动部 4-300之间,使得第三活动部4-300可相对于第一活动部4-100运动。应注意 的是,第二支撑组件4-720及第三支撑组件4-730皆未接触固定部4-900。此 外,若将固定部4-900未设置第一支撑组件4-710的侧边称为第一侧边 4-901(图31),且将设置有第一支撑组件4-710的侧边称为第二侧边4-902(图 31),由图28可看出,第二支撑组件4-720与固定部4-900的第一侧边4-901 的距离小于第二支撑组件4-720与固定部4-900的第二侧边4-902的距离。
518.如图28所示,在相对于第一支撑组件4-710的侧边,设置有第一驱动 组件4-400。第一驱动组件4-400包括一驱动元件4-410、一传导元件4-420 以及一导电元件4-430。驱动元件4-410固定于固定部4-900,具有压电材料 并产生一第一驱动力4-f1(图30)。第一驱动力4-f1的方向与主轴4-m平行。 传导元件4-420具有长条形结构并沿着主轴4-m延伸。传导元件4-420的其 中一端部连接驱动元件4-410,将第一驱动力4-f1传导至第一活动部4-100, 且传导元件4-420可相对于固定部4-900及第一活动部4-100运动,达成光 学变焦或光学对焦的效果。详细而言,第一活动部4-100具有对应传导元件 4-420的孔洞,容许传导元件4-420穿过上述孔洞,使得第一活动部4-100 可相对于传导元件4-420运动。当传导元件4-420受到驱动元件4-410产生 的第一驱动力4-f1推动而沿着主轴4-m方向运动时,若传导元件4-420与 第一活动部4-100之间的摩擦力小于最大静摩擦力,则传导元件4-420可带 动第一活动部4-100一起在主轴4-m方向上移动,达成驱动第一活动部4-100 相对于固定部4-900运动的效果。应注意的是,在一些实施例中,第一驱动 组件4-400驱动第一活动部4-100运动时,同时带动第二活动部4-200相对 于固定部4-900运动。在一些实施例中,第一驱动组件4-400驱动第一活动 部4-100运动时,亦可同时带动第三活动部4-300相对于固定部4-900运动。 导电元件4-430电性连接驱动元件4-410及外部电源,用于提供驱动信号至 第一驱动组件4-400。
519.接着请一并参照图29及图30。图29及图30分别示出根据一些实施例, 光学元件驱动机构4-10的俯视图及主视图,其中省略外框4-910以及第一活 动部4-100。在一些实施例中,第二活动部4-200包括一第一承载座4-210, 第一承载座4-210可连接第一光学元件(图未示),例如:第一光学元件可设 置于第一承载座4-210内部。第三活动部4-300包括一第二承载座4-310、一 电路组件4-330以及一底板4-350。第二承载座4-310可连接第二光学元件(图 未示),例如:第二光学元件可设置于第二承载座4-310内部。电路组件4-330 电性连接
a3延伸,且第二侧边4-902 沿着一第四轴4-a4延伸。第一侧边4-901在第三轴4-a3上的最大尺寸不同 于第二侧边4-902在第四轴4-a4上的最大尺寸。更特定地,第一侧边4-901 在第三轴4-a3上的最大尺寸大于第二侧边4-902在第四轴4-a4上的最大尺 寸。应注意的是,在本公开的实施例中,第一轴4-a1与第三轴4-a3平行, 且第二轴4-a2与第四轴4-a4平行。
524.沿着主轴4-m观察,第一驱动组件4-400位于固定部4-900的第二侧边 4-902。如此一来,可缩减机构整体在特定方向上(例如:y方向)的尺寸。沿 着第三轴4-a3观察,第一驱动组件4-400与第二驱动组件4-500部分地重叠。 沿着第四轴4-a4观察,第一驱动组件4-400与第二驱动组件4-500不重叠, 第一驱动组件4-400亦与第三驱动组件4-600不重叠。沿着第三轴4-a3观察, 第一驱动组件4-400与第三驱动组件4-600部分地重叠。更特定地,沿着第 三轴4-a3观察,第一驱动组件4-400与第二磁性元件4-620部分地重叠,第 一驱动组件4-400亦与第三磁性元件4-670部分地重叠。此外,如图31所示, 沿着主轴4-m观察,第一支撑组件4-710与第一驱动组件4-400之间形成的 连线通过位于中央的第一光学元件。
525.接着请参照图32。图32示出根据一些实施例,光学元件驱动机构4-10 的左视图。沿着第三轴4-a3观察,第一支撑组件4-710与第一驱动组件4-400 至少部分地重叠;第一支撑组件4-710与第二驱动组件4-500部分地重叠; 第一支撑组件4-710与第三驱动组件4-600部分地重叠;第一支撑组件4-710 与第一光学元件部分地重叠;且第一支撑组件4-710与第二光学元件部分地 重叠。此外,沿着第四轴4-a4观察,第一支撑组件4-710与第一驱动组件 4-400不重叠;第一支撑组件4-710与第二驱动组件4-500不重叠;第一支撑 组件4-710与第三驱动组件4-600不重叠;第一支撑组件4-710与第一光学 元件不重叠;且第一支撑组件4-710与第二光学元件不重叠。
526.在一些实施例中,固定部4-900可包括一外框4-910、一基座4-920以及 一第三光学元件4-950。外框4-910包括板状的一顶壁,与主轴4-m垂直。 基座4-920固定地连接外框4-910,且外框4-910与基座4-920之间形成一容 纳空间4-925,用以容纳第一活动部4-100及其他构件。第三光学元件4-950 固定地设置于外框4-910。在一些实施例中,由于第三光学元件4-950比第 一光学元件更靠近光源,光线通过第三光学元件4-950后,入射至第一光学 元件。在一些实施例中,第三光学元件4-950可用于光学变焦。在一些实施 例中,第一驱动组件4-400可驱动第一光学元件相对于第三光学元件4-950 运动。此外,在一些实施例中,由于第一光学元件比第二光学元件更靠近光 源,光线在入射第二光学元件之前,先通过第一光学元件。换句话说,在光 线到达第二光学元件(例如:感光元件)之前,光线先通过第一光学元件及第 三光学元件4-950,进行初步光学变焦及/或光学对焦之后,才入射第二光学 元件。然而,需特别注意的是,在根据本公开的实施例中,第二光学元件可 相对于第一光学元件及第三光学元件4-950运动,因此可通过此相对运动进 一步达成光学变焦及/或光学对焦的功效。
527.在一些实施例中,光学元件驱动机构4-10还包括一第一止动组件4-810、 一第二止动组件4-820以及一第三止动组件4-830。第一止动组件4-810位于 第一活动部4-100及固定部4-900。举例来说,第一止动组件4-810可包括位 于第一活动部4-100顶部表面的多个凸块。在第一活动部4-100运动的期间, 当此等凸块接触固定部4-900,则可限定第一活动部4-100相对于固定部 4-900在一第一运动范围中运动。第二止动组件4-820位于第一活动部4-100 及第三活动部4-300。举例来说,第一活动部4-100可包括环绕于外围的一 框架
4-150,且第二止动组件4-820可位于框架4-150面向第二活动部4-200 的表面,以及第三活动部4-300的电路组件4-330面向第二活动部4-200的 表面。在第二活动部4-200运动的期间,当第二活动部4-200接触框架4-150 或电路组件4-330,则可限定第二活动部4-200相对于第一活动部4-100在一 第二运动范围中运动。第三止动组件4-830位于第一活动部4-100及第三活 动部4-300。举例来说,第三止动组件4-830可位于第一活动部4-100面向第 三活动部4-300的表面,以及第三活动部4-300的电路组件4-330面向第一 活动部4-100的表面。在第三活动部4-300运动的期间,当电路组件4-330 与第一活动部4-100接触,则可限定第三活动部4-300相对于第一活动部 4-100及/或第二活动部4-200在一第三运动范围中运动。
528.在一些实施例中,第一运动范围在主轴4-m方向上的大小不同于第二运 动范围在主轴4-m方向上的大小。更特定地,第一运动范围在主轴4-m方 向上的大小大于第二运动范围在主轴4-m方向上的大小。此等实施例配合光 学变焦的行程距离通常大于光学对焦的行程距离。在其他实施例中,第一运 动范围及第二运动范围的大小可依需求而决定。
529.此外,在一些实施例中,光学元件驱动机构4-10可还包括一第一感测 组件4-550、一第二感测组件4-630以及一第三感测组件4-680。第一感测组 件4-550连接第二驱动组件4-500,用于感测第二活动部4-200相对于固定部 4-900的位置。第二感测组件4-630连接第三驱动组件4-600,用于感测第三 活动部4-300相对于固定部4-900平移运动的位置。第三感测组件4-680连 接第三驱动组件4-600,用于感测第三活动部4-300相对于固定部4-900旋转 运动的位置。在一些实施例中,第二感测组件4-630及第三感测组件4-680 可埋设于第二承载座4-310中并电性连接电路组件4-330,如图30所示。
530.综上所述,本公开的光学元件驱动机构4-10包括多个光学元件:第一 光学元件(例如:镜头)、第二光学元件(例如:感光元件)及第三光学元件(例 如:镜头)。通过多个驱动组件(例如:第一驱动组件4-400、第二驱动组件 4-500及第三驱动组件4-600),通过压电驱动及电磁驱动的方式,分别移动 第一光学元件及第二光学元件。除了镜头本身可相对于固定部4-900运动之 外,感光元件亦可在垂直光轴的方向上运动及旋转,有助于达成更精确的变 焦及/或对焦,获得优良的光学效果。
531.第五实施例
532.图33示出根据本公开一些实施例的触觉回馈系统5-10的立体图。应先 说明的是,在本实施例中,触觉回馈系统5-10可例如设置于一电子装置(未 图示)中且根据不同的功能而产生一回馈(例如触觉回馈)。本公开提供一种能 够提供不同震动模态且能达成小型化效果的触觉回馈系统5-10。如图33所 示,触觉回馈系统5-10包括外壳5-110、底座5-120和外框5-130。在一些实 施例中,外框5-130设置在外壳5-110和底座5-120之间,使得外壳5-110、 底座5-120和外框5-130可形成大致呈矩形的壳体。
533.在一些实施例中,外框5-130于垂直方向(例如z轴)上的厚度小于外壳 5-110、底座5-120于水平方向(例如平行于x-y平面的方向)上的尺寸。如此 一来,触觉回馈系统5-10于至少一方向上的尺寸可大幅较低,由此可达成 触觉回馈系统5-10及其所设置的电子装置的小型化。在一些实施例中,外 壳5-110、底座5-120和外框5-130可以分别是不同的元件(例如外壳5-110、 底座5-120和外框5-130可相互分离),由此可降低组装触觉回馈系统5-10 内部各元件的困难度。在另一些实施例中,外框5-130可以与外壳5-110和 底座5-120整
合在一起(例如外框5-130与外壳5-110或底座5-120可一体成 型),由此可降低触觉回馈系统5-10的组装步骤。
534.图34示出根据本公开一些实施例的触觉回馈系统5-10的爆炸图。如图 34所示,触觉回馈系统5-10包括固定部5-f、活动部5-m、驱动组件5-190 以及第一连接组件5-160。在一些实施例中,固定部5-f可包括外壳5-110、 底座5-120和外框5-130,且固定地连接于所设置的电子装置。活动部5-m 可相对固定部5-f运动。在一些实施例中,活动部5-m可包括模态调整组件 5-140,且可通过驱动组件5-190来驱动以相对固定部运动,以对电子装置产 生一回馈(例如触觉回馈)。活动部5-m可经由第一连接组件5-160活动地连 接固定部5-f。
535.在一些实施例中,外框5-130可具有相互连接的第一侧壁5-131和第二 侧壁5-132。第一侧壁5-131和第二侧壁5-132可相互大致垂直。在一些实施 例中,在第一侧壁5-131和第二侧壁5-132之间可形成圆角,由此可降低外 框5-130与电子装置中的其他元件碰撞而造成损坏的机率。在一些实施例中, 模态调整组件5-140包括框架5-141、调整元件5-150和第二连接组件5-170。 框架5-141连接第一连接组件5-160。调整元件5-150可经由第二连接组件 5-170活动地连接框架5-141,使得调整元件5-150可相对框架5-141和固定 部5-f运动。在一些实施例中,调整元件5-150的质量与框架5-141的质量 不同。以下将配合图35更进一步说明框架5-141的详细结构及模态调整组 件5-140的运作方式。
536.在一些实施例中,电路板5-180设置于底座5-120上,电路板5-180可 包括彼此分隔开的第一部分5-181和第二部分5-182。换言之,第一部分5-181 和第二部分5-182并未直接接触,且两者之间形成一间隙。在一些实施例中, 第一部分5-181和第二部分5-182于底座5-120上的形状不同,但本公开并 不限于此。电路板5-180的第一部分5-181和第二部分5-182可通过驱动组 件5-190(例如线圈5-191)物理地且电性地连接。如此一来,第一部分5-181 和第二部分5-182之间可传输信号,由此可降低电路板5-180的制造成本。 电路板5-180可用以在驱动组件5-190(例如线圈5-191)和外部元件之间接收 或传输信号,以使模态调整组件5-140产生触觉回馈。
537.在一些实施例中,在第一部分5-181和第二部分5-182之间可设有金属 片5-183,以支撑连接第一部分5-181和第二部分5-182的驱动组件5-190(例 如线圈5-191)。金属片5-183可对应第一部分5-181和第二部分5-182之间 的间隙来设置。举例而言,金属片5-183可沿第一部分5-181和第二部分5-182 的轮廓来设置,例如金属片5-183与第一部分5-181(及/或第二部分5-182)之 间的间距可保持恒定,但本公开并不限于此。金属片5-183可不接触第一部 分5-181和第二部分5-182,且与第一部分5-181和第二部分5-182电性绝缘。 在一些实施例中,金属片5-183可不与任何导电元件电性连接,且不会用以 传递任何信号。如此一来,可降低金属片5-183与其他导电元件形成短路的 机率。在一些实施例中,可省略金属片5-183,或以其他绝缘材料来代替金 属片5-183,这些配置都涵盖于本公开的范围内。
538.位置感测器5-185可设置于电路板5-180上。在一些实施例中,位置感 测器5-185可设置于第二部分5-182上,且位于线圈5-191内部(例如被线圈 5-191围绕)。举例而言,位置感测器5-185可以是霍尔效应感测器(hall effectsensor),且可位于第二部分5-182朝向第一部分5-181凸出的位置。位置感 测器5-185可感测模态调整组件5-140的位置,由此可判断是否需调整所传 输的信号及震动的相关参数。然而,应理解的是,上述配置仅作为
本公开的 一个范例,本公开所属技术领域中技术人员将可根据本公开的内容得出其他 相似的配置(例如将位置感测器5-185设置于第一部分5-181上或改变第一部 分5-181和第二部分5-182的形状或位置),而这些配置都涵盖于本公开的范 围内。
539.图35示出根据本公开一些实施例的触觉回馈系统5-10的内部结构的立 体图。应注意的是,为了清楚说明触觉回馈系统5-10的内部结构,在本实 施例中将不显示出外壳5-110和外框5-130。如图35所示,模态调整组件5-140 的框架5-141具有第一侧面5-142以及与第一侧面5-142不同的第二侧面 5-143。在一些实施例中,第一侧面5-142与第二侧面5-143皆与框架5-141 的顶面大致垂直。第二连接组件5-170可连接外框5-130(见图34)及框架5-141 的第二侧面5-143,由此框架5-141可相对于固定部5-f(例如外框5-130)运 动。
540.第一侧面5-142可朝向调整元件5-150。框架5-141还具有多个凸出部 5-144,凸出于第一侧面5-142。凸出部5-144可延伸至调整元件5-150的相 对侧。如此一来,第二连接组件5-170可连接凸出部5-144及调整元件5-150, 由此调整元件5-150可相对于框架5-141运动。此外,框架5-141亦具有多 个止动部5-145,形成于第一侧面5-142上,例如从第一侧面5-142朝向第二 连接组件5-170延伸。止动部5-145可限制调整元件5-150的运动范围。换 言之,调整元件5-150仅可于相对的止动部5-145之间的范围内运动。在第 一侧面5-142和止动部5-145上可设置缓冲件5-200。如此一来,调整元件 5-150会接触缓冲件5-200而不会直接撞击到框架5-141(例如第一侧面5-142 和止动部5-145)。举例而言,缓冲件5-200可由硬度小于框架5-141的材料(例 如为橡胶或胶体等)制成,且在调整元件5-150接触缓冲件5-200时,可吸收 调整元件5-150的冲击力,降低整体模态调整组件5-140受损的机率,或可 降低调整元件5-150运作所产生的噪音。
541.调整元件5-150可包括承载座5-151和设置于承载座5-151中的配重件 5-155。在一些实施例中,承载座5-151和配重件5-155可由不同的材料制成。 举例而言,配重件5-155可由高密度合金制成,例如含钨(w)的合金或任何 其他适合的材料,而承载座5-151可由例如塑胶或任何其他适合的材料制成。 通过配重件5-155的设置,可在有限的空间内配置足够质量的调整元件 5-150,使模态调整组件5-140能够以所需的震动模态来运作。承载座5-151 则选择易于加工的材料,由此可配合配重件5-155制成得出所需的调整元件 5-150的样态。
542.举例而言,第一连接组件5-160可以是弹片或其他具弹性的元件。在本 实施例中,第一连接组件5-160包括第一段部5-161、第二段部5-162以及连 接部5-163。举例而言,可将第一段部5-161、第二段部5-162定义为大致沿 直线延伸的部分,而将连接部5-163定义为连接第一段部5-161、第二段部 5-162的部分。在一些实施例中,第一段部5-161可连接至外框5-130,而第 二段部5-162可连接至框架5-141(例如连接于第二侧面5-143),且第一段部 5-161和第二段部5-162是通过连接部5-163连接。在一些实施例中,第一段 部5-161和第二段部5-162的延伸方向不平行。通过在框架5-141的相对两 侧设置第一连接组件5-160,框架5-141得以沿一轴向(例如沿大致平行于x 轴的方向)运动。在一些实施例中,设置于框架5-141的相对侧的第一连接组 件5-160的连接部5-163的朝向不同。更具体而言,其中一个第一连接组件 5-160的连接部5-163设置以朝向框架5-141的凸出部5-144,而另一个第一 连接组件5-160的连接部5-163设置以远离框架5-141的凸出部5-144。然而, 上述配置仅作为范例,并非意图限制本公开的范围。
543.举例而言,第二连接组件5-170可以是弹片或其他具弹性的元件。在本 实施例中,第二连接组件5-170包括多个第一段部5-171、多个第二段部5-172 以及多个连接部5-173。举例而言,可将第一段部5-171、第二段部5-172定 义为大致沿直线延伸的部分,而将连接部5-173定义为连接第一段部5-171、 第二段部5-172的部分。在一些实施例中,第一段部5-171和第二段部5-172 是交替地设置,且每个第一段部5-171和第二段部5-172是通过对应的连接 部5-173连接。在一些实施例中,连接部5-163和连接部5-173的朝向不同。 更具体而言,连接部5-173可朝向外壳5-110或底座5-120(见图34)。在一些 实施例中,连接部5-163的朝向和连接部5-173的朝向可大致垂直,但本公 开并不限于此。通过在调整元件5-150的相对两侧设置第二连接组件5-170, 在调整元件5-150得以沿一轴向(例如沿大致平行于x轴的方向)运动。应理 解的是,上述配置仅作为范例,并非意图限制本公开的范围。
544.图36示出根据本公开一些实施例的触觉回馈系统5-10的内部结构的俯 视图。如图36所示,框架5-141可包括本体5-141a和金属件5-141b。在一 些实施例中,金属件5-141b可通过模内成型(insert molding)的方式形成于本 体5-141a中。在一些实施例中,金属件5-141b的硬度可大于本体5-141a 的硬度,由此提高框架5-141整体的结构强度。在本实施例中,金属件5-141b 可显露于框架5-141的凸出部5-144,且金属件5-141b的显露部分可与第二 连接组件5-170以任何适合的方式连接(例如焊接等)。
545.此外,如图36所示,缓冲件5-200可设置于第一连接组件5-160的第一 段部5-161和第二段部5-162之间,以提供第一段部5-161和第二段部5-162 之间的缓冲,降低第一连接组件5-160损坏的机率。在本实施例中,缓冲件 5-200可设置于第一段部5-161上,但本公开并不限于此。在其他实施例中, 缓冲件5-200亦可设置于第二段部5-162上(位于第一段部5-161和第二段部 5-162之间),或者设置于连接部5-163上(位于连接部5-163和框架5-141之 间)。这些实施例都将涵盖于本公开的范围内。通过缓冲件5-200的配置,可 延长第一连接组件5-160及/或模态调整组件5-140的使用寿命,或可降低模 态调整组件5-140运作时所产生的噪音。
546.电路板5-180可产生或接收来自外部的信号,且将信号传送至驱动组件 5-190(线圈5-191),由此线圈5-191可与驱动组件5-190的磁性元件形成一驱 动力,驱动活动部5-m相对固定部5-f运动。由于此驱动力具有一特定频率, 引发活动部5-m的模态调整组件5-140的共振而使模态调整组件5-140产生 震动,进而形成一震动模态。如此一来,可使触觉回馈系统5-10达成产生 触觉回馈的功能。在一些实施例中,电路板5-180可延伸超出框架5-141于 x-y平面上的投影范围。举例而言,电路板5-180可相较于框架5-141更接 近外框5-130(见图34),但本公开并不限于此。
547.举例而言,线圈5-191可接收第一信号,其中第一信号具有第一频率, 并使活动部5-m相对固定部5-f具有第一震动模态。在本实施例中,第一频 率与第一震动模态的频率相同。更具体而言,当活动部5-m以上述第一震动 模态的方式运动时,活动部5-m(例如框架5-141)可相对固定部5-f于一第一 维度(例如沿大致平行于x轴的方向)运动(例如为直线运动)。同时,调整元 件5-150可相对框架5-141以第一运动方式运动,且此第一运动方式的频率 与此第一震动模态的频率大致相同。当调整元件5-150相对框架5-141以上 述第一运动方式运动时,调整元件5-150可于一第二维度(例如沿大致平行于 x轴的方向)运动(例如为直线运动)。当活动部5-m以第一震动模态的方式运 动时,框架5-141相对固定部5-f的运动
与调整元件5-150相对框架5-141 的运动之间具有第一相位差。举例而言,框架5-141可与调整元件5-150同 时抵达正x轴的方向的极限位置(即其在此方向所能抵达的相对于触觉回馈 系统5-10的中心的最远位置),此时框架5-141的运动与调整元件5-150的 运动之间的相位差可大致为0度。
548.通过模态调整组件的设置,可使活动部5-m相对固定部5-f具有第二震 动模态,其中第一震动模态的频率和第二震动模态的频率不同。举例而言, 线圈5-191可接收第二信号,其中第二信号具有第二频率,且使活动部5-m 相对固定部5-f具有第二震动模态。在本实施例中,第二频率与第二震动模 态的频率相同。当活动部5-m以第二震动模态的方式运动时,活动部5-m 相对固定部5-f于上述第一维度(例如沿大致平行于x轴的方向)运动。此时, 调整元件5-150相对框架5-141以第二运动方式运动,且第二运动方式的频 率与第二震动模态的频率相同。当调整元件5-150相对框架5-141以第二运 动方式运动时,调整元件5-150于第二维度(例如沿大致平行于x轴的方向) 运动。当活动部5-m以第二震动模态的方式运动时,框架5-141相对固定部 5-f的运动与调整元件5-150相对框架5-141的运动之间具有第二相位差, 且第一相位差与第二相位差不同。举例而言,在框架5-141抵达正x轴的方 向的极限位置时,调整元件5-150可抵达负x轴的方向的极限位置,此时框 架5-141的运动与调整元件5-150的运动之间的相位差可大致为90度。在一 些实施例中,第一相位差与第二相位差相差大于45度,但本公开并不限于 此。
549.综上所述,由于框架5-141和调整元件5-150的运动可具有不同的相位 差,使得触觉回馈系统5-10的活动部5-m可产生不同的震动模态,进而达 成产生不同种类的触觉回馈的效果。应理解的是,虽然上述实施例说明了两 种震动模态,但本公开所属技术领域中技术人员应可根据本公开的内容得出 其他种或更多种震动模态,任何可由本公开的结构来达成的震动模态都涵盖 于本公开的范围内。
550.图37示出根据本公开一些实施例的模态调整组件5-140的框架5-141的 仰视图。如图37所示,框架5-141具有凹槽5-146、凹槽5-147以及凹槽5-148, 分别用以容纳不同的元件。在一些实施例中,驱动组件5-190可包括第一磁 性元件5-192和一对第二磁性元件5-193,其可与线圈5-191产生驱动力来驱 动模态调整组件5-140。在一些实施例中,第一磁性元件5-192和第二磁性 元件5-193的磁极方向可不相同。举例而言,第一磁性元件5-192的磁极方 向可朝向负y轴方向,而第二磁性元件5-193的磁极方向可朝向正y轴方向, 但本公开并不限于此。为了说明书的简洁,第一磁性元件5-192和第二磁性 元件5-193的其他磁极配置将不再分别列举,惟所有可能的磁极配置都涵盖 在本公开的范围内。
551.在本实施例中,第一磁性元件5-192容纳于凹槽5-146中,而第二磁性 元件5-193则分别容纳于凹槽5-147中。应注意的是,在一些实施例中,第 一磁性元件5-192、第二磁性元件5-193以及分别对应的凹槽5-146、凹槽 5-147并未完全密合,亦即第一磁性元件5-192和凹槽5-146之间可具有间隙 (例如在凹槽5-146的角落处),第二磁性元件5-193和凹槽5-147之间可具有 间隙(例如在凹槽5-147的角落处)。如此一来,可降低第一磁性元件5-192、 第二磁性元件5-193的组装难度。
552.模态调整组件5-140还包括配重件5-149。在一些实施例中,框架 5-141(例如本体5-141a)和配重件5-149可由不同的材料制成。举例而言,配 重件5-149可由高密度合金制成,例如含钨(w)的合金或任何其他适合的材 料,而框架5-141的本体5-141a可由例如塑胶
或任何其他适合的材料制成。 通过配重件5-149的设置,可在有限的空间内配置足够质量的模态调整组件 5-140,使模态调整组件5-140能够以所需的震动模态来运作。本体5-141a 则选择易于加工的材料,由此可配合配重件5-149制成得出所需的模态调整 组件5-140的样态。在本实施例中,配重件5-149容纳于凹槽5-148中。相 似地,配重件5-149以及对应的凹槽5-148并未完全密合,亦即配重件5-149 和凹槽5-148之间可具有间隙(例如在凹槽5-148的角落处)。如此一来,可 降低配重件5-149的组装难度。
553.图38示出根据本公开一些实施例的触觉回馈系统5-10沿图33所示的 线5-a-5-a的剖视图。如图38所示,在调整元件5-150周围设有缓冲件5-200。 举例而言,缓冲件5-200可设置于外框5-130、底座5-120和框架5-141朝向 调整元件5-150的表面上。在一些实施例中,亦可于外壳5-110朝向调整元 件5-150的表面上设置缓冲件5-200,更进一步降低调整元件5-150与周遭元 件产生撞击的机率。在一些实施例中,设置于底座5-120上的缓冲件5-200 的厚度会大于电路板5-180的厚度,前述缓冲件5-200和电路板5-180的厚 度可例如沿大致平行z轴的方向来测量。如此一来,可降低电路板5-180受 调整元件5-150撞击的机率。
554.在一些实施例中,框架5-141的金属件5-141b可与第一磁性元件5-192 于大致平行于z轴的方向上部分重叠。举例而言,金属件5-141b和第一侧 面5-142的最短距离可小于第一磁性元件5-192和第一侧面5-142的最短距 离,上述最短距离可沿例如平行于y轴的方向来测量,但本公开并不限于此。 在一些实施例中,金属件5-141b可与第一磁性元件5-192于大致平行于z 轴的方向上完全重叠。此外,如图38所示,配重件5-149可设置为低于第 一磁性元件5-192,亦及配重件5-149可相较于第一磁性元件5-192更接近线 圈5-191。
555.图39示出根据本公开一些实施例的调整元件5-150的立体图。如图39 所示,调整元件5-150的承载座5-151包括本体5-151a以及埋设于本体 5-151a中的金属件5-151b。金属件5-151b可通过模内成型(insert molding) 的方式形成于本体5-151a中。在一些实施例中,金属件5-151b的硬度可大 于本体5-151a的硬度,由此提高承载座5-151整体的结构强度。承载座5-151 具有凹陷5-152,设置以容纳配重件5-155。相似地,配重件5-155以及对应 的凹陷5-152并未完全密合,亦即配重件5-155和凹陷5-152之间可具有间 隙(例如在凹陷5-152的角落处)。在一些实施例中,凹陷5-152可设置以朝 向外框5-130,亦即由框架5-141的第一表面5-142往调整元件5-150的方向 观察,并不会看到凹陷5-152。在一些实施例中,在凹陷5-152的外缘可设 有斜角结构5-153,通过上述配置,可降低设置配重件5-155的难度,但本 公开并不限于此。在另一些实施例中,可省略斜角结构5-153,由此可降低 制造承载座5-151的难度。
556.图40示出根据本公开一些实施例的调整元件5-150沿图35所示的线 5-b-5-b的剖视图。如图40所示,第二连接组件5-170还包括一延伸部5-174, 连接至第二段部5-172。在本实施例中,金属件5-151b可部分显露于本体 5-151a,且金属件5-151b的显露部分可与第二连接组件5-170的延伸部 5-174以任何适合的方式连接(例如焊接等)。此外,在此剖视图中,金属件 5-151b在承载座5-151内可具有非直线的轮廓。更具体而言,金属件5-151b 可在对应于配重件5-155的位置位于较高处(相较于金属件5-151b的显露部 分)且被本体5-151a所包覆。在一些实施例中,金属件5-151b对应于配重 件5-155的一部分与金属件5-151b未对应于配重件5-155的另一部分位于不 同平面上。如此一来,可提高承载座5-151的结构强度以承受配重件5-155 的重量。
311经由第一弯折部6-314而连接第 二段部6-312,并且第二段部6-312经由第二弯折部6-315而连接第三段部 6-313。第一连结部6-316连结第一段部6-311与固定部6-100,并且第二连 结部6-317连结第三段部6-313与活动部6-200。
565.第一段部6-311、第二段部6-312以及第三段部6-313彼此不平行。第一 弯折部6-314具有一第一弯曲角度6-θ1,并且第二弯折部6-315具有一第二 弯曲角度6-θ2。第一段部6-311具有一第一长度,第二段部6-312具有一第 二长度,并且第三段部6-313具有一第三长度。在一些实施例中,第一弯曲 角度6-θ1小于第二弯曲角度6-θ2,第一长度大于第二长度,并且第三长度 大于第二长度,但不限于此,可以视需求而改变。
566.第二弹性元件6-320具有与第一弹性元件6-310相同的构造,具有一第 一段部6-321、一第二段部6-322、一第三段部6-323、一第一弯折部6-324、 一第二弯折部6-325、一第一连结部6-326以及一第二连结部6-327,当沿着 第一方向6-d1观察时,第一弹性元件6-310与第二弹性元件6-320对称设置。
567.更详细地说,第一弹性元件6-310的第一连结部6-316连接至上盖6-110 的第四面6-114,第一弹性元件6-310的第二连结部6-317连接至上盖6-110 的第三面6-113,并且第二弹性元件6-320的第一连结部6-326连接至上盖 6-110的第二面6-112,第二弹性元件6-320的第二连结部6-327连接至上盖 6-110的第一面6-111。第一弹性元件6-310的第一段部6-311以及第二段部 6-312设置在上盖6-110的第四面6-114与活动部6-200的第四侧6-214之间。 第一弹性元件6-310的第三段部6-313设置在上盖6-110的第三面6-113与活 动部6-200的第二凹陷部6-216之间。第二弹性元件6-320的第一段部6-321 以及第二段部6-322设置在上盖6-110的第二面6-112与活动部6-200的第二 侧6-212之间。第二弹性元件6-320的第三段部6-323设置在上盖6-110的第 一面6-111与活动部6-200的第一凹陷部6-215之间。
568.在一些实施例中,第一弹性元件6-310与第二弹性元件6-320的第一段 部6-311、6-321以及第二段部6-312、6-322中的至少一个设置有一镂空图案 6-p。如在本实施例中,第一段部6-311、6-321以及第二段部6-312、6-322 皆设置有镂空图案6-p,借以调整第一弹性元件6-310以及第二弹性元件 6-320的共振频率以及震感响应。
569.接着,请参考图41至图44。图44为根据本公开一实施例的触觉回馈系 统6-1的部分元件的示意图。驱动组件6-400通过一驱动力驱动活动部6-200 相对于固定部6-100运动,其中驱动力的一驱动方向6-df与第一模态方向 6-dr1以及第二模态方向6-dr2不同,之后将详细说明。驱动组件6-400包 括一驱动磁铁组6-410、一驱动线圈组6-420以及一导磁板6-430。驱动磁铁 组6-410设置于活动部6-200的第一容纳部6-217,驱动线圈组6-420设置于 固定部6-100的底座6-120,并且部分地容纳于第一容纳部6-217。其中当沿 着第一方向6-d1观察时,驱动磁铁组6-410与驱动线圈组6-420不重叠。
570.驱动磁铁组6-410包括至少两个磁性元件6-411,对称地设置于第一容 纳部6-217的两个内壁。两个磁性元件6-411中的每一个包括至少三个磁性 单元6-411a,如图44所示,图44是示出设置于磁性元件6-411内的多个磁 性单元6-411a与驱动线圈组6-420的配置示意图,多个磁性单元6-411a沿 着第三方向6-d3排列。其中相邻的任意两个磁性单元6-411a的磁极方向不 同。
571.驱动线圈组6-420包括一第一线圈6-421、一第二线圈6-422以及一导磁 元件6-423,第一线圈6-421以及第二线圈6-422缠绕于导磁元件6-423。其 中导磁元件6-423具有
一轴部6-423a以及一分隔部6-423b,轴部6-423a沿 着第三方向6-d3延伸,分隔部6-423b将第一线圈6-421与第二线圈6-422 分隔。其中第一线圈6-421的一第一绕线方向6-dw1与第二线圈6-422的一 第二绕线方向6-dw2不同,例如在一些实施例中,第一线圈6-421以及第二 线圈6-422中的一以顺时钟方向缠绕轴部6-423a,另一个则以逆时钟方向缠 绕轴部6-423a。通过上述磁性单元6-411a与第一线圈6-421以及第二线圈 6-422这样的配置,可以使得沿着第三方向6-d3的磁场更强,进而使得沿着 第三方向6-d3的驱动力更大,而可以加强振动幅度。
572.导磁板6-430具有矩形形状,设置于活动部6-200与上盖6-110的顶面 6-115之间,用于导磁并且可以作为活动部6-200相对于上盖6-110的承靠面, 通过设置导磁板6-430可以增加磁场,使得驱动力增大进而提升振动幅度, 此外,还可以使得在组装驱动磁铁组6-410与配重元件6-220时更为容易。 其中当沿着第一方向6-d1观察时,导磁板6-430与驱动磁铁组6-410重叠。
573.电路组件6-500以及位置感测组件6-600用以对活动部6-200进行闭回 路控制。电路组件6-500包括一电路板6-510以及设置于电路板6-510上的 多个ic元件6-520(为简化起见,图42只示出一个ic元件6-520),电路板 6-510设置于固定部6-100的底座6-120。感测组件6-600与电路板6-510连 接,并且感测活动部6-200相对固定部6-100的运动,包括一参考元件6-610 以及一位置感测元件6-620,在本实施例中,参考元件6-610为一磁性元件, 设置于活动部6-200,位置感测元件6-620例如可为霍尔感测器(hall effectsensor)、磁敏电阻感测器(mr sensor)、或磁通量感测器(fluxgate)等,设置于 电路板6-510,以感测设置在活动部6-200上的参考元件6-610的磁场,借以 获得活动部6-200相对于固定部6-100的位置。其中当沿着第一方向6-d1 观察时,参考元件6-610与位置感测元件6-620至少部分重叠。
574.接着请参考图42、图43以及图45。图45为根据本公开一实施例的触 觉回馈系统6-1的部分元件的示意图。多个缓冲元件6-700可以包括凝胶或 是阻尼油等,用以减少撞击破坏或是当触觉回馈系统6-1运作时产生的噪音, 设置于固定部6-100与活动部6-200之间。举例来说,当沿着第一方向6-d1 观察时,活动部6-200的第一容纳部6-217为矩形,多个缓冲元件6-700中 的四个可以设置于第一容纳部6-217的四个角落,避免活动部6-200直接撞 击设置于固定部6-100的驱动线圈组6-420。
575.此外,通过设置第一凹陷部6-215、第二凹陷部6-216,使得连接组件 6-300与活动部6-200之间具有一缓冲距离,并且将活动部6-200中靠近连接 组件6-300的两个角落设计为非直角,使得多个缓冲元件6-700中的一个设 置于活动部6-200的第一凹陷部6-215以及/或第二凹陷部6-216与连接组件 6-300之间(上述的两个角落),可以避免活动部6-200撞击连接组件6-300 而使得连接组件6-300断裂。
576.多个阻尼元件6-800可以包括凝胶或是阻尼油等,用以加速触觉回馈系 统6-1的响应速度,使得触觉回馈系统6-1可以达到快速启动并且快速停止 的效果。多个阻尼元件6-800设置于固定部6-100与活动部6-200之间。举 例来说,多个阻尼元件6-800的至少一个可以设置于活动部6-200与底板之 间。并且多个阻尼元件6-800的至少一个可以设置于活动部6-200与驱动组 件6-400的第一线圈6-421(以及/或第二线圈6-422)之间。
577.接着参考图43说明触觉回馈系统6-1的作动。活动部6-200具有一第一 自然频率
(更详细地说,活动部6-200与连接组件6-300的组合具有第一自 然频率),当驱动组件6-400以一第一激振频率驱动活动部6-200,并且第一 激振频率等于第一自然频率时,活动部6-200相对固定部6-100具有一第一 振动模态,并且沿着第一模态方向6-dr1运动。
578.并且活动部6-200具有一第二自然频率(更详细地说,活动部6-200与 连接组件6-300的组合具有第二自然频率),当驱动组件6-400以一第二激振 频率驱动活动部6-200,并且第二激振频率等于第二自然频率时,活动部 6-200相对固定部6-100具有一第二振动模态,并且沿着第二模态方向6-dr2 运动。
579.如前所述,可以通过活动部6-200的配重元件6-220改变质量、或是通 过改变连接组件6-300的镂空图案6-p或是粗细等,进而改变活动部6-200 与连接组件6-300的组合的自然频率,在本实施例中,控制上述的变因使得 第一模态方向6-dr1与第二模态方向6-dr2不同且不平行,更详细地说,第 一模态方向6-dr1以及第二模态方向6-dr2垂直于第一方向6-d1。此外,在 本实施例中,驱动方向df垂直于第一方向6-d1,并且驱动方向6-df与第一 模态方向6-dr1以及第二模态方向6-dr2不平行也不垂直。
580.由于活动部6-200在运动过程中会受到二种力的作用,其一为驱动力, 是由设置于活动部6-200的驱动磁铁组6-410与设置于固定部6-100的驱动 线圈组6-420彼此的磁场相互作用下而产生。其二为第一弹性元件6-310与 第二弹性元件6-320的弹性恢复力,即第一弹性元件6-310与第二弹性元件 6-320受活动部6-200的牵引发生弯曲变形而产生的弹性恢复力。
581.在本实施例中,通过第一弹性元件6-310与第二弹性元件6-320的结构 设计,即第一弹性元件6-310以及第二弹性元件6-320具有朝向不同方向延 伸的第一段部6-311、6-321、第二段部6-312、6-322以及第三段部6-313、 6-323,使得第一弹性元件6-310与第二弹性元件6-320受活动部6-200牵引 而产生的弯曲变形,除了在平行于驱动力方向有变形分量,在垂直于驱动力 方向也有变形分量。因而使得驱动组件6-400施加驱动力至活动部6-200上 时,尽管驱动力的驱动方向6-df并非沿着第一模态方向6-dr1或是第二模态 方向6-dr2,依然可以通过上述连接组件6-300的结构而使得活动部6-200 在第一激振频率下沿着第一模态方向6-dr1运动,并且可以在第二激振频率 下沿着第二模态方向6-dr2运动,进而实现仅由一个触觉回馈系统6-1就能 产生多个方向的振动,达到装置的功能强化、轻量化以及成本低的功效。
582.此外,第一段部6-311、6-321、第二段部6-312、6-322以及第三段部6-313、 6-323的延伸长度、第一弯曲角度6-θ1以及第二弯曲角度6-θ2也能影响活动 部6-200的振动振幅在第二方向6-d2以及第三方向6-d3的分量,由此改变 各段部之间的长度以及角度,可以使得触觉回馈系统6-1能满足装置需要的 不同方向的振动的振幅分量,以达到产品客制化的功效。
583.综上所述,本公开提供一种触觉回馈系统,设置于一装置,包括一固定 部、一活动部、一连接组件以及一驱动组件。固定部固定地连接装置。活动 部相对于固定部可沿着一第一模态方向以及一第二模态方向运动。活动部经 由连接组件活动地连接固定部。驱动组件通过一驱动力驱动活动部相对于固 定部运动。本公开的触觉回馈系统可以实现通过沿着相同驱动方向的驱动 力,而使得活动部沿着第一模态方向或是第二模态方向运动。
584.虽然本发明的实施例及其优点已公开如上,但应该了解的是,本领域技 术人员在
不脱离本发明的精神和范围内,当可作更动、替代与润饰。此外, 本发明的保护范围并未局限于说明书内所述特定实施例中的工艺、机器、制 造、物质组成、装置、方法及步骤,任何所属技术领域中技术人员可从本发 明公开内容中理解现行或未来所发展出的工艺、机器、制造、物质组成、装 置、方法及步骤,只要可以在此处所述实施例中实施大抵相同功能或获得大 抵相同结果皆可根据本发明使用。因此,本发明的保护范围包括上述工艺、 机器、制造、物质组成、装置、方法及步骤。另外,每一权利要求构成个别 的实施例,且本发明的保护范围也包括各个权利要求及实施例的组合。
585.虽然本发明已以较佳实施例公开于上,然其并非用以限定本发明,任何 熟习此项工艺者,在不脱离本发明的精神和范围内,当可作些许的更动与润 饰,因此本发明的保护范围当视随附的权利要求所界定者为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。