技术特征:
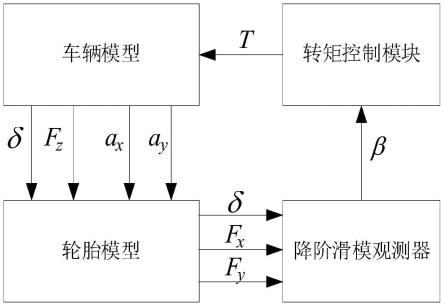
1.一种分布式驱动电动客车转矩控制方法,其特征在于包括如下步骤:1)数据收集:整车控制器接收车速传感器、方向盘转角传感器的信号,并进行车辆状态参数的收集;2)根据得到的车辆状态参数,设计非线性滑模观测器对质心侧偏角进行状态估计;3)根据估计到的质心侧偏角与理想的质心侧偏角进行比较,对汽车转向状态进行判断,最后进行转矩控制;步骤2中设计非线性滑模观测器具体包括如下子步骤:21)对车辆进行动力学分析,采用七自由度车辆模型描述:式中,m为整车质量,ν
x
为纵向车速,ν
y
为横向车速,r为横摆角速度,δ为前轮转角,β为质心侧偏角,d为前后轴的轮距,a为车辆质心到前轴的距离,b车辆质心到后轴的距离,i
z
为横摆转动惯量,f
x
为作用在车轮的纵向力,f
y
为作用在车轮的侧向力;则车轮动力学方程为:式中j
w
为车轮转动惯量,t
ij
为车轮转矩,ω
ij
为车轮转速,r
w
为车轮的有效半径。22)由于车轮信号、加速度信号作为系统的状态变量可通过轮速传感器直接测量,对车辆纵向力进行求解得:降阶观测器的非线性形式表达式为:其中状态向量为:x=[v
x v
y r]输出向量为:y=[r]输入变量为:u=[δf
fl f
fr f
rl f
rr
]基于滑模变结构理论可构造观测器如下:基于滑模变结构理论可构造观测器如下:式中ki
s
为观测器的鲁棒项,调整增益矩阵k,可消除系统的不确定项,并通过切换函数i
s
在滑模面附近高速切换达到滑动条件。2.根据权利要求1所述的一种分布式驱动电动客车转矩控制方法,其特征在于:选择用
饱和函数作为滑模观测器的切换函数,在滑模面附近设置边界层,则有:式中λ为边界层的厚度;式中滑模观测器阻尼系数矩阵为:h=[h
1 h
2 h3]滑模观测器鲁棒控制项矩阵为:k=[k
1 k
2 k3]通过上述观测器得到客车的纵向速度v
x
和侧向速度v
y
,再根据:得到实际的质心侧偏角。3.根据权利要求2所述的一种分布式驱动电动客车转矩控制方法,其特征在于:步骤3中转矩控制包括如下子步骤:31)首先需求得理想的质心侧偏角,采用二自由度车辆模型计算得到的参数作为理想参考值;所述二自由度车辆模型以前轮转角为输入,只有沿y轴的侧向运动与绕z轴的横摆运动这两个自由度;其车身运动的动力学方程如下:式中,m为整车质量,ν
x
为汽车的纵向车速,ν
y
为横向车速,r为横摆角速度,δ为前轮转角,β为质心侧偏角,d为前后轴的轮距,a为车辆质心到前轴的距离,b为车辆质心到后轴的距离,k1,k2为前后轮等效侧偏刚度,i
z
为横摆转动惯量;在稳态下得到理想的质心侧偏角:式中k为不充分转向系数为:。4.根据权利要求3所述的一种分布式驱动电动客车转矩控制方法,其特征在于:步骤3得到的理想的质心侧偏角与步骤2中得到的实际质心侧偏角进行比较:当实际质心侧偏角β大于理想侧偏角β
d
时,汽车转向状态表现为过多转向,应增加左前轮转矩t
fl
和左后轮的转矩t
rl
,减小右前轮转矩t
fr
和右后轮转矩t
rr
;当实际质心侧偏角β大于理想侧偏角β
d
时,汽车转向状态表现为不足转向,应减小左前轮转矩t
fl
和左后轮的转矩t
rl
,增大右前轮转矩t
fr
和右后轮转矩t
rr
。
技术总结
本发明提供了一种分布式驱动电动客车转矩控制方法,包括如下步骤:1)数据收集:整车控制器接收车速传感器、方向盘转角传感器的信号,并进行车辆状态参数的收集;2)根据得到的车辆状态参数,设计非线性滑模观测器对质心侧偏角进行状态估计;3)根据估计到的质心侧偏角与理想的质心侧偏角进行比较,对汽车转向状态进行判断,最后进行转矩控制。上述的分布式驱动电动客车转矩控制方法,针对车辆运动控制中,大多通过驱动电机的定向控制分配,因而未考虑车辆转向行驶中的阻力与稳定的问题。考虑车辆转向行驶中的阻力与稳定的问题。考虑车辆转向行驶中的阻力与稳定的问题。
技术研发人员:林继铭 邹腾 张锋 张勇
受保护的技术使用者:华侨大学
技术研发日:2022.04.28
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。