技术特征:
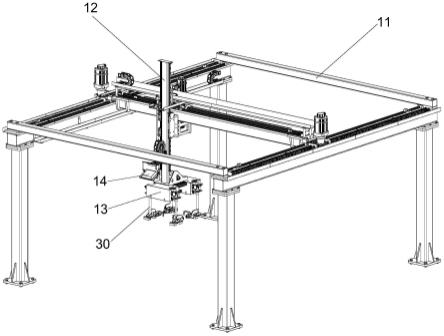
1.一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:包括机架(11)、动力装置、桁架机器人z轴末端(12)、升降台(20)、转动机构、平移箱(13)、两组调节机构、四组升降抓杆(30)和与升降抓杆(30)相对应的执行机构,所述动力装置设于所述机架(11)梁上,所述桁架机器人z轴末端(12)设于所述机架(11)之间,所述动力机构用于驱动所述桁架机器人z轴末端(12)沿x轴或y轴进行平面移动定位并进行上下料;所述桁架机器人z轴末端(12)下端固定安装有回转支撑台(15),所述升降台(20)设于所述回转支撑台(15)下侧,所述转动机构设于所述回转支撑台(15)上,所述转动机构用于驱动所述升降台(20)相对所述回转支撑台(15)转动;所述平移箱(13)设有两组且分别设于所述回转支撑台(15)两侧,所述升降台(20)两侧分别延伸至两个所述平移箱(13)内,所述平移箱(13)与位于所述平移箱(13)内的所述升降台(20)之间固定连接,两组所述调节机构分别设于两个所述平移箱(13)内,四组所述升降抓杆(30)两两安装于两个所述平移箱(13)内,所述调节机构用于调节位于同一所述平移箱(13)内的所述升降抓杆(30)之间的间距,所述执行机构分别设于所述升降抓杆(30)下方,所述执行组件用于对物件进行夹持,所述执行机构通过所述平移箱(13)内的光信号控制其自身的工作状态。2.根据权利要求1所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述转动机构包括回转齿盘(16)和回转齿轮(17),所述回转齿盘(16)转动连接于所述回转支撑台(15)上,所述回转齿轮(17)啮合设于所述回转齿盘(16)一侧,所述回转齿轮(17)上侧动力连接有转动电机,所述转动电机固定安装于所述回转支撑台(15)内,所述回转齿盘(16)下端动力连接与所述升降台(20)上端面。3.根据权利要求1所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述调节机构包括调节导轨(23)、调节滑台(22)、调节滑块(26)、光敏组件和滑台连接块(27),所述平移箱(13)内位于其长边处固定安装有若干加强筋(25),每侧所述加强筋(25)的数量至少为两组,所述调节导轨(23)固定安装于同侧所述加强筋(25)之间,所述调节滑台(22)设有四组且两两设于两个所述平移箱(13)内,所述调节滑台(22)对称设置于两侧所述调节导轨(23)之间,所述调节滑块(26)设于所述调节滑台(22)与所述调节导轨(23)外表面之间,所述调节滑台(22)通过所述调节滑块(26)与所述调节导轨(23)之间相对滑动,所述调节滑台(22)上表面固定安装有滑台连接块(27),所述平移箱(13)内固定安装有与所述滑台连接块(27)相对应的调节气缸(24),位于同一个所述平移箱(13)内的两个所述调节滑台(22)上端面相互远离一侧均安装有升降台侧板(21),所述光敏组件安装于所述升降台侧板(21)上。4.根据权利要求3所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述光敏组件包括光电开关(28)和反光板(29),所述光电开关(28)与所述反光板(29)分别对称设于所述升降台侧板(21)上,一个所述升降台侧板(21)对应一个所述光电开关(28)以及一个所述反光板(29),所述升降抓杆(30)与所述光敏组件相对应,所述升降抓杆(30)设于所述光电开关(28)与所述反光板(29)之间,所述升降抓杆(30)与所述调节滑台(22)之间通过所述直线轴承(31)装配,所述升降抓杆(30)下端延伸至所述调节滑台(22)下方,所述升降抓杆(30)外圆面上方套设有光轴套。5.根据权利要求4所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在
于:所述升降抓杆(30)外表面固定套设有尼龙限位垫圈(41),所述尼龙限位垫圈(41)位于所述直线轴承(31)上侧且位于所述光轴套下侧。6.根据权利要求1所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述执行机构包括电磁铁安装板(33)、电磁铁(34)、夹爪安装支架(35)、抓取组件,所述电磁铁安装板(33)设于所述升降抓杆(30)下侧,所述电磁铁安装板(33)上端面固定安装有铰接件(32),所述铰接件(32)中心处与所述升降抓杆(30)下端相铰接,所述电磁铁(34)固定安装于所述电磁铁安装板(33)下侧,所述夹爪安装支架(35)固定设于所述升降抓杆(30)外表面下侧,所述抓取组件通过所述夹爪安装支架(35)与所述升降抓杆(30)之间进行装配。7.根据权利要求6所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述抓取组件包括固定安装于夹爪安装支架(35)其中一侧的带磁叶片旋转气缸(36),所述带磁叶片旋转气缸(36)内动力连接有带磁夹爪(37)。8.根据权利要求7所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述带磁夹爪(37)数量与所述升降抓杆(30)相对应,每个所述平移箱(13)下方的两个所述带磁夹爪(37)之间转动方向相反。9.根据权利要求6所述的一种应用于桁架机器人的磁吸式手爪末端执行器,其特征在于:所述电磁铁(34)与供电设备电性连接,所述桁架机器人z轴末端(12)上设有工业相机拍摄系统(14),所述工业相机拍摄系统(14)与供电设备电性连接。
技术总结
本发明提供一种应用于桁架机器人的磁吸式手爪末端执行器,包括机架、动力装置、桁架机器人Z轴末端、升降台、转动机构、平移箱、两组调节机构、四组升降抓杆和与升降抓杆相对应的执行机构,所述动力装置设于所述机架梁上,所述桁架机器人Z轴末端设于所述机架之间,所述动力机构用于驱动所述桁架机器人Z轴末端沿X轴或Y轴进行平面移动定位并进行上下料。本方案通过电磁铁执行抓取作业并配有带磁夹爪进行运输上料作业的方式,使桁架机器人在搬运和上料过程中,电磁铁可以处于断电状态,节约电力,并可以无需考虑电磁铁在运输过程中还存在突然断电导致工件掉落的风险,同时相较于依赖单一的卡爪或电磁铁的抓取方式,提高执行器的通用性和灵活性。用性和灵活性。用性和灵活性。
技术研发人员:韦丽桦 袁嫣红 李正军 陈天杰
受保护的技术使用者:浙江理工大学
技术研发日:2022.06.21
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。