1.本实用新型涉及蓝藻标本收集装置,具体是涉及一种用于湿地的蓝藻标本收集装置。
背景技术:
2.湿地水环境功能是多方面的,它可作为直接利用的水源或补充地下水,同时也是水生生物生存、繁衍的栖息地;但在一些营养丰富的水体中,有些蓝藻常于夏季大量繁殖,并在水面上形成一层蓝绿色而有腥臭味的浮沫,称为“水华”,大规模的蓝藻爆发,被称为“绿潮”,绿潮引起水质恶化,严重时耗尽水中氧气而造成鱼类的死亡。由此可见,对于湿地水域的蓝藻标本采集研究是十分重要的。
3.传统的湿地水域环境蓝藻标本采集往往都是需要人为进行工作,并且十分耗费人力,同时有很多的湿地水域环境内的蓝藻标本人为采集不到,不能进行全面蓝藻标本的采集处理。人为采集工作量大,且效率低。现有技术中,通常是通过泵将水和蓝藻一起吸取收集,但这种方法不适用于胶状较厚的蓝藻,胶状较厚的蓝藻吸取不方便,且湿地中一般是水、泥、蓝藻混合,泵吸取泥沙会损坏收集装置。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种自动化的用于湿地的蓝藻标本采集装置。
5.技术方案:为解决上述问题,本实用新型采用一种用于湿地的蓝藻标本收集装置,包括车体、采集装置、驱动车体运动的履带驱动装置和螺旋桨驱动装置,所述采集装置包括采集蓝藻的机械臂、切割装置和采集箱,机械臂设置于车体前端,所述切割装置设置于机械臂正下方,用于切断机械臂抓取的蓝藻,采集箱用于收集机械臂采集的蓝藻。
6.有益效果:本实用新型相对于现有技术,其优点是通过机械臂采集人为采集不到的胶状较厚的蓝藻群,并通过切割装置切割蓝藻,使采集蓝藻更容易,采用履带驱动装置使收集装置在湿地中跟平稳的运行,采用螺旋桨驱动装置使收集装置在湿地水域较深的地方也可以正常运行。
7.进一步的,所述切割装置包括剪刀和切割电动伸缩杆,所述剪刀包括剪切部、第一手柄和第二手柄,所述第一手柄和第二手柄配合带动剪切部进行剪切,所述第一手柄与车体固定连接,所述切割电动伸缩杆一端与第一手柄铰接,另一端与第二手柄铰接,切割电动伸缩杆的伸缩带动第一手柄和第二手柄相对运动,从而带动剪切部进行剪切。
8.进一步的,所述机械臂包括机械手和连接臂,所述机械手包括若干机械爪、若干机械爪电动伸缩杆和支架,所述机械爪铰接在支架上,所述机械爪电动伸缩杆一端固定在支架上,机械爪电动伸缩杆另一端与机械爪固定连接,机械爪电动伸缩杆的伸缩带动机械爪做抓取动作;所述机械手通过连接臂与车体连接。
9.进一步的,所述连接臂包括第一电动伸缩杆、连接杆、第二电动伸缩杆、第三电动
伸缩杆、动臂、底座、机械臂电机,所述底座设置于车体上,且相对车体旋转,所述动臂一端与底座铰接,另一端与连接杆一端铰接,连接杆另一端与机械手支架铰接;所述第一电动伸缩杆输出端与机械手支架铰接,第一电动伸缩杆固定端固定于连接杆上;所述第二电动伸缩杆输出端与连接杆铰接,固定端固定于动臂上;所述第三电动伸缩杆输出端与动臂铰接,固定端与底座铰接;所述机械臂电机带动底座旋转。
10.进一步的,所述履带驱动装置包括设置于车体两侧的履带、履带轮、驱动电机,车体两侧均设有主动履带轮和从动履带轮,驱动电机驱动主动履带轮转动;所述履带内表面设有齿纹,车体同侧的主动履带轮和从动履带轮外表面均设有齿纹并内嵌于履带内与履带齿纹啮合。
11.进一步的,所述车体一侧包括一个主动履带轮和五个从动履带轮,三个从动履带轮并排设置于车体侧面底端,所述主动履带轮设置于车体侧面后端,一个从动履带轮设置于车体侧面前端,一个从动履带轮设置于车体侧面上端。
12.进一步的,所述螺旋桨驱动装置包括螺旋桨和螺旋桨电机,所述螺旋桨电机固定于车体后端内部,螺旋桨电机输出轴位于车体外部与螺旋桨连接,螺旋桨电机驱动螺旋桨旋转为车体提供动力。
13.进一步的,还包括摄像头,所述摄像头固定于车体顶部,用于实时拍摄湿地水域环境的蓝藻图像。
14.进一步的,还包括控制与信息传输模块,所述控制与信息传输模块用于控制采集装置、履带驱动装置、螺旋桨驱动装置和摄像头的工作,并用于传输摄像头摄取的蓝藻图像。
15.进一步的,所述采集箱设置于车体顶部,位于机械臂运行范围内。
附图说明
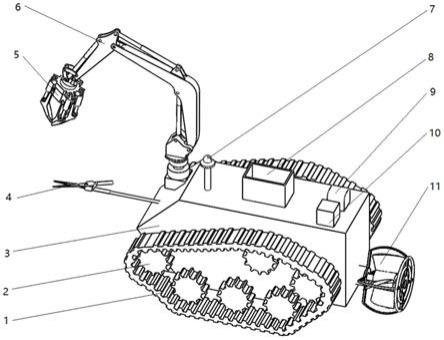
16.图1是本实用新型收集装置的结构示意图;
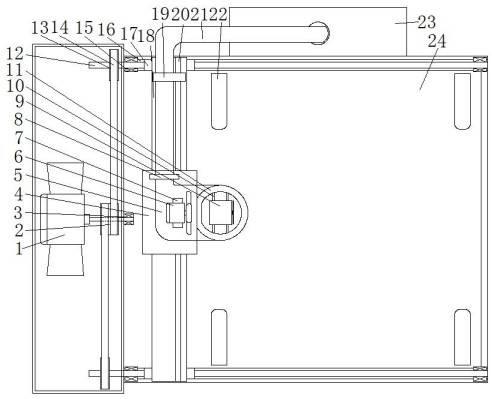
17.图2是本实用新型标本收集装置的主视图;
18.图3是本实用新型标本收集装置的俯视图;
19.图4是本实用新型中机械臂的结构示意图;
20.图5是本实用新型中切割装置的结构示意图;
21.图6是本实用新型中螺旋桨电机连接螺旋桨的剖视图;
22.图7为本实用新型中联轴器连接驱动电机和履带主动轮的剖视图。
具体实施方式
23.如图1至图3所示,本实施例中的一种用于湿地的蓝藻标本收集装置,包括车体3、采集装置、驱动车体运动的履带驱动装置和螺旋桨驱动装置;车体3采用铝合金材料,可以减少使用过程中的磨损,延长装置的使用寿命,轻质耐用,并且增加了装置的稳定性。履带驱动装置包括设置于车体3两侧的履带1、履带轮2,履带轮2采用金属齿型结构,车体3两侧均设有主动履带轮和从动履带轮,履带1内表面设有齿纹,车体同侧的主动履带轮和从动履带轮外表面均设有齿纹并内嵌于履带1内与履带齿纹啮合,车体一侧包括一个主动履带轮和五个从动履带轮,三个从动履带轮并排设置于车体侧面底端,一个从动履带轮设置于车
体侧面前端,一个从动履带轮设置于车体侧面上端,主动履带轮设置于车体侧面后端,如图7所示,驱动电机301输出端通过联轴器302与主动履带轮连接,并驱动主动履带轮转动,主动履带轮带动履带运动,并同时带动从动履带轮转动,齿形履带轮2与履带1充分啮合,大大提高了装置的行进速度,防止装置在多种湿地环境下发生打滑现象。
24.如图6所示,螺旋桨驱动装置包括螺旋桨11和螺旋桨电机12,螺旋桨电机12通过螺栓固定于车体后端内部,螺旋桨电机12输出轴位于车体外部与螺旋桨11连接,螺旋桨电机12驱动螺旋桨11旋转为车体提供动力,以能够保证车体3在湿地水域环境能够正常行驶。
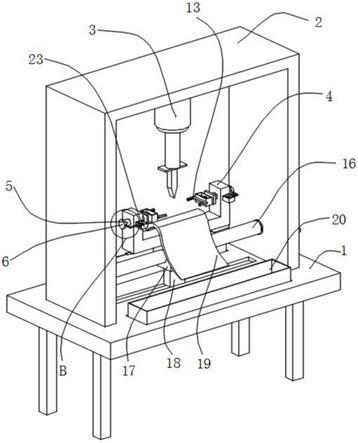
25.采集装置用于湿地条件下水域环境内蓝藻标本采集。采集装置包括采集蓝藻的机械臂、切割装置4和采集箱8,机械臂设置于车体3前端,切割装置4设置于机械臂正下方,用于切断机械臂抓取的蓝藻,采集箱8通过胶接的方式固定在车体3的上方,位于机械臂的运行范围内,实现对机械手5抓取的蓝藻标本集中处理。
26.如图4所示,机械臂包括机械手5和连接臂6,机械手5包括若干机械爪501、若干机械爪电动伸缩杆502和支架503,在本实施例中,设置四个机械爪501,材质为铝合金,机械爪501铰接在支架503的侧面,设置四个机械爪电动伸缩杆502分别控制四个机械爪501,机械爪电动伸缩杆502固定端固定在支架503上,输出端与机械爪501侧面固定连接,机械爪电动伸缩杆502的伸缩带动机械爪501做抓取动作;机械爪电动伸缩杆502以0.03米/秒的速度伸缩,从而实现机械手5抓取小车在水域行进中所需要收集的蓝藻,机械手5通过连接臂6与车体3连接,支架503用于固定整个机械手5并将连接臂与机械手5相连接。
27.连接臂6包括第一电动伸缩杆601、连接杆602、第二电动伸缩杆603、第三电动伸缩杆604、动臂605、底座606、机械臂电机608,机械臂电机608固定于车体3前端,机械臂电机608输出轴通过机械臂联轴器607与底座606固定连接,机械臂电机608带动底座606相对车体3旋转,机械臂电机608转动实现车体3前端的机械臂转动到车体3上方,并将蓝藻标本采集到采集箱8中,转动速度为15转/分,转动180度需要2秒,动臂605一端与底座606铰接,另一端与连接杆602一端铰接,连接杆602另一端与机械手支架503铰接;第一电动伸缩杆601输出端与机械手支架503铰接,第一电动伸缩杆601固定端固定于连接杆602上;第一电动伸缩杆601以0.05米/秒的速度伸缩,从而实现机械手5相对于连接杆602的上下摆动;第二电动伸缩杆603输出端与连接杆602铰接,固定端固定于动臂605上,第二电动伸缩杆603以0.05米/秒的速度伸缩,第二电动伸缩杆603的伸缩运动带动连接杆602绕着动臂605上转动,从而实现调整机械手5高度的作用;第三电动伸缩杆604输出端与动臂605铰接,固定端与底座606铰接,第三电动伸缩杆604以0.05米/秒的速度伸缩,实现整个机械臂绕底座606转动。机械手5采集胶状较厚的蓝藻群,并通过切割装置切割,较薄蓝藻群,机械手不方便抓取,不在该装置的应用范围内。
28.如图5所示,切割装置4包括剪刀401和切割电动伸缩杆402,剪刀401包括剪切部、第一手柄和第二手柄,第一手柄和第二手柄配合带动剪切部进行剪切,第一手柄通过固定连接杆403与车体3固定连接,切割电动伸缩杆402一端与第一手柄铰接,另一端与第二手柄铰接,切割电动伸缩杆402以0.05米/秒的速度伸缩带动第一手柄和第二手柄相对运动,从而带动剪切部进行剪切,实现剪刀401的工作,使机械手5顺利抓取蓝藻。
29.车体3顶部通过轴固定有摄像头7,用于实时拍摄湿地水域环境的蓝藻图像,实现对蓝藻标本的采集处理。
30.车体3顶部还胶接有控制与信息传输模块10,控制与信息传输模块10控制驱动电机301的转动从而控制收集装置在湿地上的运动,操作过程中计算机将指令经无线信号传输到控制与信息传输模块10,控制与信息传输模块10再通过控制线控制驱动电机301的启停与正反转,调整控制驱动电机301的正反转来实现收集装置的运动方向,该收集装置的行进速度为0.5米/秒,且在收集过程中该装置能够匀速移动。控制与信息传输模块10通过控制线控制螺旋桨电机12的启停与正反转,通过控制螺旋桨电机12的正反转来实现收集装置在水中的正常行驶,收集装置在水中的行进速度为0.03米/秒,且在收集过程中该装置在水中能够匀速移动。控制与信息传输模块10控制切割电动伸缩杆402的伸缩从而实现剪刀401的工作,控制与信息传输模块10控制机械爪电动伸缩杆502的伸缩从而实现机械手5的抓取动作,控制与信息传输模块10控制第一电动伸缩杆601、第二电动伸缩杆603、第三电动伸缩杆604、机械臂电机608的工作,从而实现机械臂的采集工作。控制与信息传输模块10通过无线传输的形式控制摄像头7的工作,并将其实时拍摄到的湿地影像数据发送到计算机端,便于实时拍摄湿地水域环境的蓝藻图像,实现对蓝藻标本的采集处理。
31.车体3顶部还胶接有电源9,电源9采用7.4v2200mah锂电池,提高倍率性能,明显降低了循环过程的动态内阻增幅,提高装置的动力输出;电源9通过线缆的方式为驱动电机301、切割电动伸缩杆402、机械爪电动伸缩杆502、第一电动伸缩杆601、第二电动伸缩杆603、第三电动伸缩杆604、机械臂电机608、摄像头7、控制与信息传输模块10和螺旋桨电机12供电,是整个收集装置的供电部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。