1.本发明涉及图像处理技术领域,更具体地说,涉及一种颈部透明层厚度的测量方法、装置、设备及存储介质。
背景技术:
2.颈部透明层(nuchal translucency,nt)是指胎儿颈椎颈部皮下的无回声带,位于皮肤高回声带与深部软组织高回声带之间,是一种在早孕期利用超声观察到的位于胎儿颈后的皮下积水。染色体及其他病变与颈部透明层的厚度有关,因此,颈部透明层的测量检查是孕早期检查中非常重要的一环。超声是检测胎儿畸形筛查的可靠手段,其分辨率高、图像清晰、后处理技术优越,用于胎儿畸形的检查可有效提高临床诊断的检出率和准确率。
3.目前,主流的nt测量方法主要有两种,方法一的主要操作流程如下:
4.1、用户发起nt测量,图像界面显示测量光标;2、用户移动测量光标至某个位置a后,点击确认键,之后移动轨迹球,图像界面出现以a点为矩形端点的测量框,通过调整该矩形框,可以将需要测量的部位放入矩形测量框内,调整矩形框另一对角端点位置后,点击确认键,出现nt测量结果;
5.方法二的主要操作流程如下:1、用户发起nt测量后,图像区域的测量光标直接显示成测量矩形框,该矩形框在测量过程中,高度和宽度始终保持不变;2、移动轨迹球,将该矩形框移动到nt图形区域,选定位置后,点击确认键,出现nt测量结果。
6.可见,上述两种nt测量方法中,都要求操作者在标准切面上进行测量,这就对操作者的经验和能力提出了很高的要求,而且方法一的测量流程相对复杂,需要操作者能准确的判断、识别并框选出nt区域,否者将严重影响测量结果的准确性;方法二的测量流程虽然相较方法一有所简化,但因为在测量过程中其测量矩形框是固定的,所以无法根据所测胎儿设置合适的测量矩形框大小,如果矩形框选取较小,则不能准确测量出nt区域较宽的胎儿,如果矩形框选取过大,则会引入过多干扰数据,可能将其他组织误认为是nt区域,影响测量结果的准确性。
7.因此,如何对颈部透明层的厚度进行准确测量,是本领域技术人员需要解决的问题。
技术实现要素:
8.本发明的目的在于提供一种颈部透明层厚度的测量方法、装置、设备及存储介质,以对颈部透明层的厚度进行准确测量。
9.为实现上述目的,本发明提供一种颈部透明层厚度的测量方法,包括:
10.接收颈部透明层的测量指令;
11.根据所述测量指令确定对应的窗口标识;
12.通过ai后台服务进程及所述窗口标识确定待测量图像,并对所述待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果。
13.其中,若当前系统模式为实时扫查模式,则所述接收颈部透明层的测量指令之后,还包括:
14.自动执行图像冻结操作,并获得冻结图像;
15.则所述通过ai后台服务进程及所述窗口标识确定待测量图像包括:
16.通过所述ai后台服务进程确定与所述窗口标识对应的所述冻结图像,并将所述冻结图像作为所述待测量图像。
17.其中,若当前系统模式为回调模式,则所述通过ai后台服务进程及所述窗口标识确定待测量图像,包括:
18.通过所述ai后台服务进程确定与所述窗口标识对应的缓存数据,所述缓存数据包括:图像缓存数据或者视频缓存数据;
19.通过所述ai后台服务进程在所述缓存数据中识别标准切面图像,并将所述标准切面图像作为所述待测量图像。
20.其中,所述根据所述测量指令确定对应的窗口标识,包括:
21.根据所述测量指令确定对应的操作行为标识;
22.确定与所述操作行为标识对应的窗口标识。
23.其中,所述ai后台服务进程为基于tensor flow/tensor rt计算框架的mask-rcnn算法模型。
24.其中,所述得到颈部透明层厚度的测量结果之后,还包括:
25.将所述待测量图像在界面上显示;
26.在所述待测量图像上展示所述测量结果。
27.其中,所述在所述待测量图像上展示所述测量结果之后,还包括:
28.若检测到重新测量指令,则清除所述待测量图像及所述测量结果后,重新执行所述接收颈部透明层的测量指令的步骤。
29.为实现上述目的,本发明进一步提供一种颈部透明层厚度的测量装置,包括:
30.指令接收模块,用于接收颈部透明层的测量指令;
31.窗口标识确定模块,用于根据所述测量指令确定对应的窗口标识;
32.待测量图像确定模块,用于通过ai后台服务进程及所述窗口标识确定待测量图像;
33.测量模块,用于通过ai后台服务进程对所述待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果。
34.为实现上述目的,本发明进一步提供一种超声设备,包括:
35.存储器,用于存储计算机程序;
36.处理器,用于执行所述计算机程序时实现上述的颈部透明层厚度的测量方法的步骤。
37.为实现上述目的,本发明进一步提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的颈部透明层厚度的测量方法的步骤。
38.通过以上方案可知,本发明实施例提供的一种颈部透明层厚度的测量方法,包括:接收颈部透明层的测量指令;根据测量指令确定对应的窗口标识;通过ai后台服务进程及
窗口标识确定待测量图像,并对待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果。
39.可见,本方案对颈部透明层的厚度进行测量时,不需要手动在超声图像中选择颈部透明层厚度的测量区域,只需要ai后台服务进程根据窗口标识自动确定待测量图像后,对待测量图像中的颈部透明层进行测量,通过该方式,可以避免因操作经验带来的测量误差,简化颈部透明层的测量流程,降低测量难度;并且,本方案通过ai后台服务进程对颈部透明层进行测量,还能提高测量准确度。本发明还公开了一种颈部透明层厚度的测量装置、设备及存储介质,同样能实现上述效果。
附图说明
40.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
41.图1为本发明实施例公开的一种超声系统结构示意图;
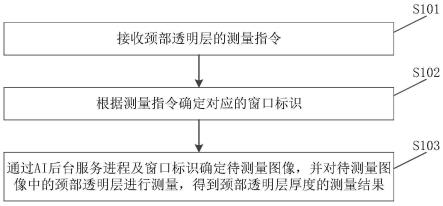
42.图2为本发明实施例公开的一种颈部透明层厚度的测量方法流程示意图;
43.图3为本发明实施例公开的另一种颈部透明层厚度的测量方法流程示意图;
44.图4为本发明实施例公开的ai模型总体结构示意图;
45.图5为本发明实施例公开的测量完成状态示意图;
46.图6为本发明实施例公开的整体系统流程示意图;
47.图7为本发明实施例公开的一种颈部透明层厚度的测量装置结构示意图;
48.图8为本发明实施例公开的一种超声设备结构示意图。
具体实施方式
49.目前,颈部透明层nt如果增厚,可以逐渐发展成为大的水囊瘤,但其与是否伴有胎儿水肿没有确定的相关性,但绝大多数胎儿nt的增厚,都没有明显的胎儿水肿。胎儿nt的增厚,不仅与唐氏综合征(21-三体综合征及其他染色体异常)相关、还与多种胎儿异常(如心脏畸形、神经系统畸形、严重脊柱前侧弯)、发育迟缓、发育不全、遗传综合征及胎儿死亡高度相关,胎儿病变及不良妊娠终止的流行率随nt厚度的增加而呈指数上升,因此,颈部透明层的测量检查是孕早期检查中非常重要的一环。
50.通过超声设备进行nt测量时,需在11~13 6周、胎儿头臀长为45~84mm时进行,要求胎儿正中矢状切面,胎儿水平位(与超声声束呈90
°
角),胎儿自然位置(过度屈曲或伸张不宜测量),图像放到最大,只显示胎儿头部及上胸部,测量标尺轻微移动只改变结果0.1mm,测量皮肤与颈椎软组织间的最宽距离,测量三次,取最大值。但是,目前的颈部透明层测量方法中,对操作者的经验和能力提出了很高的要求,若操作者对颈部透明层的测量区域没有准确的选定,则会带来较大的测量误差。
51.因此,本发明实施例中,公开了一种颈部透明层厚度的测量方法、装置、设备及存储介质,以保证nt测量准确性要求的前提下,降低nt测量的操作流以及用户进行nt测量的经验要求。
52.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
53.为了便于理解,下面对本技术的技术方案所适用的系统架构进行介绍,参见图1,为本发明实施例公开的一种超声系统结构示意图;通过图1可以看出,该超声系统中包括超声系统11及ai(artificial intelligence,人工智能)后台服务进程12,其中,超声系统11包括:测量子系统111、后端子系统112、虚拟机子系统113。其中,测量子系统111主要用于接收用户触发的测量颈部透明层的测量指令,并将该测量指令发送给后端子系统112,后端子系统根据该测量指令确定对应的窗口标识,并发送给虚拟机子系统113,虚拟机子系统113将该窗口标识发送给ai后台服务进程12,通过ai后台服务进程12进行测量。下面通过具体的测量方法来对本方案进行说明。
54.参见图2,本发明实施例提供的一种颈部透明层厚度的测量方法流程示意图;通过图2可以看出,该方法包括如下步骤:
55.s101、接收颈部透明层的测量指令;
56.具体来说,测量子系统接收的测量指令,为对颈部透明层的厚度进行测量的指令,该测量指令具体可以为通过超声系统键盘上的实体按键触发生成的测量指令,也可以为用户通过超声设备上的ui(user interface,用户界面)操作界面触发nt自动测量后生成的测量指令,其触发nt自动测量的方式包括但不限于通过超声图形界面上的测量菜单入口触发,或者通过超声触摸屏设备上的测量按钮触发等等,在此并不限定,只要能触发nt自动测量,从而生成对应的测量指令即可。
57.s102、根据测量指令确定对应的窗口标识;
58.可以理解的是,由于本方案在触发颈部透明层的测量指令时,是通过在测量菜单入口触发,或者通过超声触摸屏设备上的测量按钮触发,其触发过程并不涉及具体的超声图像,因此在超声设备的屏幕中具有多个窗口,每个窗口所展示的超声图像不同时,若用户触发了测试指令,此时并不能确定该测量指令具体是对哪个窗口中所展示的超声图像进行nt测量,因此在本方案中,需要维护用户所触发的具体操作与窗口之间的对应关系,这样用户在执行某一操作后,即可根据该对应关系快速确定对应的窗口,并对该窗口所展示的超声图像执行对应的操作。
59.本发明为了对各个窗口进行区分,对每个窗口设置唯一对应的窗口标识,如:窗体id(identity,唯一编码),这样在接收到用户触发的测量指令后,即可根据上述的对应关系,查找与该测量指令唯一对应的窗口标识,根据该窗口标识即可查找到对应的超声图像,以便确定最终的待测量图像。例如:超声设备的显示器上通过3个窗口展示了不同的超声图像,这三个窗口的标识分别为:窗口1、窗口2和窗口3,接收到对颈部透明层进行测量的指令后,根据上述对应关系可确定与该测量指令对应的窗口标识为窗口1,则从窗口1所对应的图像或者视频中确定待测量图像,并继续执行后续的nt测量过程。其中,若超声设备的屏幕中只有1个窗口,则本方案根据测量指令确定对应的窗口标识时,可直接将屏幕上所展示的当前窗口的标识,作为与测量指令对应的窗口标识。例如:接收到对颈部透明层进行测量的指令后,当前屏幕上只有窗口1,则可直接确定与该测量指令对应的窗口标识为窗口1。
60.需要说明的是,本方案为了更方便的维护具体操作与窗口之间的对应关系,可为每个操作设置唯一对应的操作行为标识,如:操作行为id,该操作行为标识相当于对用户操作行为的定义,系统通过识别该操作行为标识,即可知道用户执行了那种操作。设置操作行为标识后,系统会维护操作行为标识与窗体标识之间的对应关系。用户触发nt自动测量生成测量指令,超声系统的测量子系统接收到该测量指令后,会将该测量指令转换为对应的操作行为标识,并发送至后端子系统,后端子系统再根据上述对应关系,查找与该操作行为标识对应的窗口标识,也即:根据测量指令确定对应的窗口标识的过程具体包括:首先根据测量指令确定对应的操作行为标识,然后再确定与操作行为标识对应的窗口标识。
61.s103、通过ai后台服务进程及窗口标识确定待测量图像,并对待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果。
62.需要说明的是,虚拟机子系统接收到后端子系统发送的窗口标识后,需要将该窗口标识发送至ai后台服务进程,ai后台服务进程可根据该窗口标识确定待测量图像,并进行颈部透明层的测量。其中,虚拟机子系统将该窗口标识发送给ai后台服务进程时,具体是通过tcp/ip协议(transmission control protocol/internet protocol,传输控制协议/网际协议)进行发送,由于窗口标识是32位字符串,不能直接通过tcp/ip协议传输,因此,虚拟机子系统在发送窗口标识之前,需要通过转换函数对窗口标识进行序列化转换,转换为tcp/ip协议格式数据,以通过tcp/ip协议发送给ai后台服务进程,ai后台服务进程接收到虚拟机子系统发送的数据后,会通过转换函数对该数据进行反序列化转换获得窗口标识,ai后台服务进程会根据该窗口标识在缓存中找到对应的数据,并确定待测量图像。
63.具体来说,ai后台服务进程是独立于超声系统进程之外的进程,与超声系统进程一起随超声设备开机启动,并运行于超声后台中,主要负责运用人工智能技术完成超声图像的自动识别和推理计算,实现对待测量图像的确定以及从待测量图像中进行nt自动测量计算。
64.综上可见,本方案对颈部透明层的厚度进行测量时,不需要手动在超声图像中选择颈部透明层厚度的测量区域,只需要ai后台服务进程根据窗口标识自动确定待测量图像后,对待测量图像中的颈部透明层进行测量,通过该方式,可以避免因操作经验带来的测量误差,简化颈部透明层的测量流程,降低测量难度;并且,本方案通过ai后台服务进程对颈部透明层进行测量,还能提高测量准确度。
65.参见图3,本发明实施例提供的另一种颈部透明层厚度的测量方法流程示意图;通过图3可以看出,该方法包括如下步骤:
66.s201、接收颈部透明层的测量指令;
67.s202、判断当前系统模式是实时扫查模式还是回调模式;若为实时扫查模式,则执行s203;若为回调模式,则执行s206;
68.s203、自动执行图像冻结操作,并获得冻结图像;
69.s204、根据测量指令确定对应的窗口标识;
70.s205、通过ai后台服务进程确定与窗口标识对应的冻结图像,并将冻结图像作为待测量图像,并继续执行s209;
71.需要说明的是,用户进入nt诊断模式后,可以进行nt图像的实时扫查或进入nt电影回调,在此为了对上述两个状态进行区分,设置了实时扫查模式和回调模式,其中,实时
扫查模式是指超声设备在对用户进行检查时,对实时产生的超声图像进行nt测量,而回调模式是对已经扫查过的视频或者图片进行回调,相当于对历史视频或者历史图片进行nt测量,在当前系统模式不同时,其确定待测量图像的过程不同。
72.具体来说,后端子系统需要根据当前的图像状态来确定当前系统模式,如果图像状态为实时状态,则判定当前系统模式为实时扫查模式,在该情况下,需要自动冻结图像,也即:在当前系统模式为实时扫查模式时,用户触发测量指令后,系统会自动执行冻结操作,得到冻结图像,该冻结图像即为待测量图像。因此,虚拟机子系统将窗口标识发送至ai后台服务进程后,ai后台服务进程会通过该窗口标识直接查找到该冻结图像,并将该冻结图像作为待测量图像。
73.s206、根据测量指令确定对应的窗口标识;
74.s207、通过ai后台服务进程确定与窗口标识对应的缓存数据,缓存数据包括:图像缓存数据或者视频缓存数据;
75.s208、通过ai后台服务进程在缓存数据中识别标准切面图像,并将标准切面图像作为待测量图像;
76.具体来说,在回调模式下,ai后台服务进程根据窗口标识查找到的数据为存储在缓存中待进行回调的图像或者视频,ai后台服务进程查找到对应的缓存数据后,需要在该缓存数据中进行ai推理计算,获得标准切面图像,并将该标准切面图像作为待测量图像。其中,缓存数据中的图像缓存数据中可包括多张缓存图片,视频缓存数据是由很多帧图像组成的,因此,ai后台服务进程从缓存数据中查找待测量图像时,需要通过ai推理计算从多张图片中查找最理想的标准切面图像,再进行nt识别。
77.s209、通过ai后台服务进程对待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果;
78.具体来说,本方案中的ai后台服务进程主要通过tensor flow/tensor rt计算框架及ai算法模型实现,其中,该ai算法模型可以为mask-r-cnn(convolutional neural networks,卷积神经网络)算法模型,也可以为其他卷积神经网络算法模型,在此并不具体限定。mask-r-cnn算法模型在进行nt测量之前需要通过训练数据进行训练,训练后的mask-r-cnn算法模型还需要通过测试数据进行测试,若成功率大于预定阈值,则可对待测量图像进行标准切面的识别及nt测量。mask-r-cnn算法模型主要可分为四个阶段:特征提取、rpn(region propasal network,区域建议网络)和第一次回归分类、第二次回归分类、最终的分类和分割,参见图4,本发明实施例提供的ai模型总体结构示意图,下面具体介绍各个阶段:
79.1、从输入的待测量图像中提取特征图:c1-5、aspp3-5、f3-5、p3-7,其中,特征图的提取运用了图像金字塔、aspp(atrous spatial pyramid pooling,空洞空间卷积池化金字塔,deeplab系列)等技术,使特征图尽可能丰富,且具有多尺度等优点。
80.2、特征图p3-7用于rpn和第一次的回归及分类,得到初步分类结果和box信息。
81.3、特征图f3-5和初步分类结果和box信息相结合做第二次回归,得到更精准的box信息。
82.4、特征图f3-5和精化后的box信息相结合,经过各种特征提取,结合第一次分类,运算得到最后的结果信息。
83.s210、将待测量图像在界面上显示,在待测量图像上展示测量结果。
84.具体来说,在s205和s208中,确定待测量图像后,需要将该待测量图像在界面上显示,若当前系统模式为实时扫查模式,则执行冻结操作后,即可将该冻结图像在界面上进行显示;若当前系统模式为回调模式,则通过ai后台服务进程确定标准切面图像后,虚拟机子系统会将该标准切面图像在图片中的序列号或者标准切面图像在视频中的帧号发送给后端子系统,通过后端子系统将对应的标准切面图像设置其为当前帧图像,在界面上进行展示。
85.需要说明的是,后端子系统将窗口标识发送至虚拟机子系统后,后端子系统还需要向测量子系统发送nt自动计算消息,测量子系统收到该消息后,创建nt测量工具对象类,同时初始化nt测量工具的状态和其关联的nt测量结果数据信息,并自动触发nt测量工具的计算接口,该接口将触发后端子系统向虚拟机子系统发送测量结果获取消息,虚拟机子系统将测量结果获取消息转发给ai后台服务进程,ai后台服务进程会将测量结果返回给超声系统中的虚拟机子系统,并通过后端子系统返回给测量子系统进行显示,完成nt的一键自动测量操作。
86.需要说明的是,测量子系统获取到测量结果后,可在界面上展示的待测量图像中显示测量结果,由于此时未经过操作者确认,因此当前状态为待确认状态,在该状态下,可在界面右上角展示nt值,还可以在nt区域展示nt分割结果以及nt值的测量线。若操作者对本次测量不满意,可以点击取消键进行重新测量,因此,本方案在待测量图像上展示测量结果之后,若检测到重新测量指令,则清除待测量图像及测量结果后,重新执行接收颈部透明层的测量指令的步骤。若操作者对本次测量结果满意,可点击确认键结束本次测量,状态更改为测量完成状态,测量结果可保存到系统内存中,用于在测量报告中显示或者打印。参见图5,为本发明实施例提供的测量完成状态示意图,在该状态下,可在界面右上角展示nt值,还可以在nt区域展示nt值的测量线。
87.参见图6,为本发明实施例公开的整体系统流程示意图,图6分别基于测量子系统、后端子系统、虚拟机子系统和ai后台服务进程对本方案所述的测量方法进行说明,包括:测量子系统接收测量指令后,将测量指令转换为对应的操作行为id,并发送至后端子系统,后端子系统根据该操作行为id确定对应的窗体id发送至虚拟机子系统,通过虚拟机子系统序列化后发送至ai后台服务进程,ai后台服务进程根据反序列化后得到的窗体id确定待测量图像并进行nt测量,其中,实时模式下的待测量图像为冻结图像,回调模式下的待测量图像为ai后台服务进程识别的标准切面图像。ai后台服务进程在nt测量后,虚拟机子系统将ai后台服务进程发送的待测量图像的标识及nt测量结果发送至后端子系统,该待测量图像的标识为回调模式下确定的标准切面图像的序列号或者帧号,如果是实时图像,则后端子系统在冻结图像后,便将冻结图像在界面上展示,ai后台服务进程便不需要反馈冻结图像的标识。后端子系统将nt测量结果发送至测量子系统,通过测量子系统进行展示。
88.通过本方案进行nt测量时,基于用户角度而言,用户发起nt测量后,即可将待测量图像展示在界面上,同时待测量图像中还会自动绘制出nt图像和nt测量结果,可见,该方式并不需要用户通过手动的方式,在超声图像中选择颈部透明层厚度的测量区域,避免因操作经验带来的测量误差,简化颈部透明层的测量流程,降低测量难度;并且,本方案通过ai后台服务进程对颈部透明层进行测量,还能提高测量准确度。
89.下面对本发明实施例提供的测量装置、设备及存储介质进行介绍,下文描述的测量装置、设备及存储介质与上文描述的测量方法可以相互参照。
90.参见图7,本发明实施例提供的一种颈部透明层厚度的测量装置结构示意图,具体包括:
91.指令接收模块21,用于接收颈部透明层的测量指令;
92.窗口标识确定模块22,用于根据所述测量指令确定对应的窗口标识;
93.待测量图像确定模块23,用于通过ai后台服务进程及所述窗口标识确定待测量图像;
94.测量模块24,用于通过ai后台服务进程对所述待测量图像中的颈部透明层进行测量,得到颈部透明层厚度的测量结果。
95.其中,所述测量装置还包括:
96.冻结模块,用于在当前系统模式为实时扫查模式,自动执行图像冻结操作,并获得冻结图像;
97.所述待测量图像确定模块具体用于:通过所述ai后台服务进程确定与所述窗口标识对应的所述冻结图像,并将所述冻结图像作为所述待测量图像。
98.其中,所述待测量图像确定模块包括:
99.数据确定单元,用于在当前系统模式为回调模式时,通过所述ai后台服务进程确定与所述窗口标识对应的缓存数据,所述缓存数据包括:图像缓存数据或者视频缓存数据;
100.识别单元,用于通过所述ai后台服务进程在所述缓存数据中识别标准切面图像,并将所述标准切面图像作为所述待测量图像。
101.其中,窗口标识确定模块包括:
102.操作行为标识确定单元,用于根据所述测量指令确定对应的操作行为标识;
103.窗口标识确定单元,用于确定与所述操作行为标识对应的窗口标识。
104.其中,所述ai后台服务进程为基于tensor flow/tensor rt计算框架的mask-rcnn算法模型。
105.其中,所述测量装置还包括:
106.显示模块,用于将所述待测量图像在界面上显示;
107.展示模块,用于在所述待测量图像上展示所述测量结果。
108.其中,所述测量装置还包括:
109.清除模块,用于检测到重新测量指令后,清除所述待测量图像及所述测量结果后,并触发指令接收模块。
110.参见图8,本发明实施例还提供了一种超声设备结构示意图,包括:
111.存储器31,用于存储计算机程序;
112.处理器32,用于执行所述计算机程序时实现上述任意方法实施例所述的颈部透明层厚度的测量方法的步骤。
113.该设备可以包括存储器31、处理器32和总线33。
114.其中,存储器31包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序,该存储器为非易失性存储介质中的操作系统和计算机可读指令的运行提供环境。处理器32在一些实施例中可以是一中央处理器(central processing unit,
cpu)、控制器、微控制器、微处理器或其他数据处理芯片,为网关设备提供计算和控制能力,执行所述存储器31中保存的计算机程序时,可以实现前述任一实施例公开的执行测量方法的步骤。
115.该总线33可以是外设部件互连标准(peripheral component interconnect,简称pci)总线或扩展工业标准结构(extended industry standard architecture,简称eisa)总线等。该总线可以分为地址总线、数据总线、控制总线等。为便于表示,图8中仅用一条粗线表示,但并不表示仅有一根总线或一种类型的总线。
116.进一步地,设备还可以包括网络接口34,网络接口34可选的可以包括有线接口和/或无线接口(如wi-fi接口、蓝牙接口等),通常用于在该设备与其他电子设备之间建立通信连接。
117.图8仅示出了具有组件31-34的设备,本领域技术人员可以理解的是,图8示出的结构并不构成对设备的限定,可以包括比图示更少或者更多的部件,或者组合某些部件,或者不同的部件布置。
118.本发明实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意方法实施例所述的颈部透明层厚度的测量方法的步骤。
119.其中,该存储介质可以包括:u盘、移动硬盘、只读存储器(read-only memory,rom)、随机存取存储器(random access memory,ram)、磁碟或者光盘等各种可以存储程序代码的介质。
120.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
121.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
