1.本发明涉及葡萄藤清土领域,具体涉及一种葡萄藤清土装置。
背景技术:
2.在对葡萄藤进行种植时,当遇到冬天,需要将葡萄藤压弯捆绑,并盖设上保护膜,再通过使用设备对土壤进行旋出,进而对葡萄藤进行掩埋,在来年开春时,通过工人使用清土装置将葡萄藤上的土壤刮掉,再将薄膜拉走,而传统的清土装置是通过工人操作两个油缸,使得刮板将土壤刮掉,而每当移动车带动清土装置移动设定的距离后,再通过工人操作两个油缸进行刮土,需要工人进行频繁的自适应调节,使得工人劳动的紧张感,进而使得工人容易疲劳,并且,由于工人需要频繁的自适应调节,使得工人在进行刮土时,操作不便,且操作过程不流畅。
技术实现要素:
3.本发明的目的在于提供一种葡萄藤清土装置。
4.为达此目的,本发明采用以下技术方案:
5.提供一种葡萄藤清土装置,包括刮爪、拉升机构、十字滑台、第一连接架、拉动机构、导滑架和安装架,导滑架固定安装在第一连接架上,用于对安装架被拉动机构的拉动过程进行导向,拉动机构固定安装在第一连接架上,用于拉动安装架进行运动,十字滑台固定安装在第一连接架上,用于对安装架进行辅助定位,拉升机构固定安装在安装架上,用于拉动刮爪进行上下运动,刮爪固定安装在拉升机构的工作端上,用于对土墩进行挖土,导滑架包括高度调节机构、两个转座、两个连接座、四个第一限位板,高度调节机构固定安装在第一连接架上,两个转座固定安装在两个高度调节机构的顶部,两个连接座分别与两个转座转动连接,每两个第一限位板固定安装在一个连接座上,安装架的两侧上均设置有导滑柱,导滑柱插设在两个第一限位板之间,用于对安装架沿着第一限位板长度方向的滑动提供导向。
6.进一步的,拉动机构包括拉动油缸、导滑座、拉座和连接拉板,导滑座固定安装在第一连接架上,拉动油缸固定安装在导滑座上,连接拉板固定安装在拉动油缸的输出端上,拉座固定安装在安装架上,且连接拉板与拉座滑动连接。
7.进一步的,拉座包括固定板和两个侧板,固定板固定安装在安装架上,两个侧板固定安装在固定板上,连接拉板插设在两个侧板之间,连接拉板上设置有滑柱,滑柱的两端插设在两个侧板内,侧板内开设有供侧板滑动的条形滑槽。
8.进一步的,高度调节机构包括推板和两个调节螺杆,两个调节螺杆的顶端与推板的底部固定连接,两个调节螺杆的底部穿过第一连接架,第一连接架上开设有供调节螺杆穿过的避让孔,且每个调节螺杆上均啮合有两个调节螺母,用对推动调节螺杆沿着避让孔的轴向进行上下运动。
9.进一步的,导滑座包括安装板、第一导柱和导座,导座固定安装在第一连接架上,
第一导柱与导座滑动连接,安装板固定安装在第一导柱上,拉动油缸固定安装在安装板上。
10.进一步的,刮爪包括刮板、弹性推动机构、第二连接架、第二限位板和转板,第二连接架固定安装在拉升机构上,转板与第二连接架转动连接,刮板固定安装在转板上,第二限位板固定安装在第二连接架上,用于对刮板的转动进行支撑,弹性推动机构固定安装在第二连接架上,用于将弹性推动机构推动抵触在第二限位板上。
11.进一步的,弹性推动机构包括导板、第三导柱和抵触弹簧,导板固定安装在第二连接架上,第三导柱可滑动的安装在导板上,抵触弹簧用于对第三导柱施加推动刮板旋转的弹性力。
12.进一步的,十字滑台包括竖直滑台和水平滑台,安装架固定安装在竖直滑台的滑座上,竖直滑台固定安装在水平滑台的滑座上,水平滑台固定安装在第一连接架上。
13.进一步的,拉升机构包括拉升油缸和第二导柱,第二导柱与安装架滑动连接,拉升油缸固定安装在安装架上,拉升油缸的输出端与刮爪固定连接。
14.本发明的有益效果:该葡萄藤清土装置,通过这种方式进行刮土,相比于传统的刮土方式,工人只需要在最开始调节第一限位板的斜率即可,不需要工人在刮土的过程中,进行频繁的自适应调节,降低了工人劳动的紧张感,进而减少工人的疲劳,并且,由于工人不需要频繁的自适应调节,使得工人在进行刮土时,操作更加方便,大部分的人员都能进行操作,且操作过程更加流畅,不需要犹豫,因此,提高了工人的工作效率,并且该设备由于刮土后的斜率恒定,也可以应用于城市路边的土墩,使得土墩整齐平整,利于城市的美观。
附图说明
15.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍。
16.图1为本发明的立体结构示意图一;
17.图2为本发明的立体结构示意图二;
18.图3为图2的a处局部放大图;
19.图4为导滑架的立体结构示意图;
20.图5为拉动机构的立体结构示意图;
21.图6为拉座的立体结构示意图;
22.图7为高度调节机构的立体结构示意图;
23.图8为导滑座的立体结构示意图;
24.图9为刮爪的立体结构示意图;
25.图10为弹性推动机构的立体结构示意图;
26.图11为十字滑台的立体结构示意图;
27.图12为拉升机构的立体结构示意图;
28.图中:
29.1、刮爪;1a、刮板;1b、弹性推动机构;1b1、导板;1b2、第三导柱;1b3、抵触弹簧;1c、第二连接架;1d、第二限位板;1e、转板;
30.2、拉升机构;2a、拉升油缸;2b、第二导柱;
31.3、十字滑台;3a、竖直滑台;3b、水平滑台;
32.4、第一连接架;
33.5、拉动机构;5a、拉动油缸;5b、导滑座;5b1、安装板;5b2、第一导柱;5b3、导座;5c、拉座;5c1、固定板;5c2、侧板;5c3、滑柱;5d、连接拉板;
34.6、导滑架;6a、高度调节机构;6a1、推板;6a2、调节螺杆;6b、转座;6c、第一限位板;6d、连接座;
35.7、安装架;7a、导滑柱;
36.10、土墩。
具体实施方式
37.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
38.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
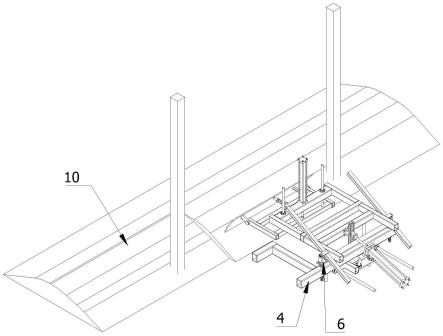
39.参照图1和图2所示的一种葡萄藤清土装置,包括刮爪1、拉升机构2、十字滑台3、第一连接架4、拉动机构5、导滑架6和安装架7,导滑架6固定安装在第一连接架4上,用于对安装架7被拉动机构5的拉动过程进行导向,拉动机构5固定安装在第一连接架4上,用于拉动安装架7进行运动,十字滑台3固定安装在第一连接架4上,用于对安装架7进行辅助定位,拉升机构2固定安装在安装架7上,用于拉动刮爪1进行上下运动,刮爪1固定安装在拉升机构2的工作端上,用于对土墩10进行挖土;
40.如图3和图4所示,导滑架6包括高度调节机构6a、两个转座6b、两个连接座6d、四个第一限位板6c,高度调节机构6a固定安装在第一连接架4上,两个转座6b固定安装在两个高度调节机构6a的顶部,两个连接座6d分别与两个转座6b转动连接,每两个第一限位板6c固定安装在一个连接座6d上,安装架7的两侧上均设置有导滑柱7a,导滑柱7a插设在两个第一限位板6c之间,用于对安装架7沿着第一限位板6c长度方向的滑动提供导向。当需要进行调节刮爪1的刮土斜度时,通过工人推动第一限位板6c进行旋转,使得第一限位板6c转动成需要的斜率,该斜率为需要对土墩10刮土的斜率,当斜率调节完成后,再将连接座6d与转座6b之间进行固定连接,进而完成调节。
41.连接座6d上固定设置有螺纹柱,螺纹柱穿过转座6b,转座6b上开设有供螺纹柱穿过的转孔,且螺纹柱上啮合有螺母,当需要连接座6d与转座6b之间进行固定连接时,通过即将螺母拧紧抵触在转座6b上,进而完成连接座6d和转座6b之间的固定连接,连接座6d和转座6b之间的贴合处可以设置防护垫。
42.而铲土的深度通过工人调节高度调节机构6a,使得高度调节机构6a带动第一限位板6c进行上下移动,使得刮爪1进行上下移动,进而调节刮爪1铲土的深度。
43.如图5所示,拉动机构5包括拉动油缸5a、导滑座5b、拉座5c和连接拉板5d,导滑座5b固定安装在第一连接架4上,拉动油缸5a固定安装在导滑座5b上,连接拉板5d固定安装在拉动油缸5a的输出端上,拉座5c固定安装在安装架7上,且连接拉板5d与拉座5c滑动连接。通过工人使用操作杆驱动拉动油缸5a进行工作,使得拉动油缸5a的输出端将拉动连接拉板5d,使得连接拉板5d拉动拉座5c进行运动,进而使得拉座5c拉动安装架7进行运动,安装架7将带动导滑柱7a沿着第一限位板6c进行滑动。
44.如图6所示,拉座5c包括固定板5c1和两个侧板5c2,固定板5c1固定安装在安装架7上,两个侧板5c2固定安装在固定板5c1上,连接拉板5d插设在两个侧板5c2之间,连接拉板5d上设置有滑柱5c3,滑柱5c3的两端插设在两个侧板5c2内,侧板5c2内开设有供侧板5c2滑动的条形滑槽。通过连接拉板5d被拉动,连接拉板5d将拉动滑柱5c3进行运动,使得滑柱5c3拉动侧板5c2进行运动,滑柱5c3将在侧板5c2的条形滑槽内进行滑动;
45.在第一限位板6c进行旋转调节的过程中,第一限位板6c将带动导滑柱7a向上或者向下运动,使得导滑柱7a带动拉座5c进行上下运动,拉座5c将通过连接拉板5d推动拉动油缸5a的输出端进行运动,且导滑座5b也将进行辅助滑动,保证第一限位板6c能够进行旋转,在进行调节时,拉动油缸5a的输出端能够被推动,也就是与拉动油缸5a连接的油阀处于打开的状态。
46.如图7所示,高度调节机构6a包括推板6a1和两个调节螺杆6a2,两个调节螺杆6a2的顶端与推板6a1的底部固定连接,两个调节螺杆6a2的底部穿过第一连接架4,第一连接架4上开设有供调节螺杆6a2穿过的避让孔,且每个调节螺杆6a2上均啮合有两个调节螺母,用对推动调节螺杆6a2沿着避让孔的轴向进行上下运动。通过拧动两个调节螺母,进而通过啮合推动调节螺杆6a2进行上下移动,调节螺杆6a2将带动推板6a1进行上下运动,调节螺杆6a2将推动推板6a1进行上下运动,使得推板6a1带动转座6b进行运动,进而完成第一限位板6c的高度调节,进而实现了调节刮爪1铲土的深度。
47.如图8所示,导滑座5b包括安装板5b1、第一导柱5b2和导座5b3,导座5b3固定安装在第一连接架4上,第一导柱5b2与导座5b3滑动连接,安装板5b1固定安装在第一导柱5b2上,拉动油缸5a固定安装在安装板5b1上。当拉动油缸5a进行拉动时,或者在对第一限位板6c的位置进行调节时,拉动油缸5a将带动安装板5b1进行上下移动,安装板5b1将带动两个第一导柱5b2沿着导座5b3进行上下滑动,避免在拉动油缸5a拉动的过程中出现卡死的现象。
48.如图9所示,刮爪1包括刮板1a、弹性推动机构1b、第二连接架1c、第二限位板1d和转板1e,第二连接架1c固定安装在拉升机构2上,转板1e与第二连接架1c转动连接,刮板1a固定安装在转板1e上,第二限位板1d固定安装在第二连接架1c上,用于对刮板1a的转动进行支撑,弹性推动机构1b固定安装在第二连接架1c上,用于将弹性推动机构1b推动抵触在第二限位板1d上。通过拉升机构2推动刮爪1向下运动,使得刮板1a的底部插入到土壤内,再通过拉动机构5拉动刮爪1进行运动,使得刮板1a进行倾斜运动,进而对土墩10进行刮土,使得埋设在葡萄藤上的土壤被刮掉,在刮土的过程中,当遇到刮板1a难以刮动的障碍物时,刮板1a将带动转板1e沿着与第二连接架1c的铰接处进行旋转,使得刮板1a推动弹性推动机构1b,进而使得刮板1a避让开障碍物,避让后,弹性推动机构1b推动刮板1a重新抵触在第二限位板1d上。
49.如图10所示,弹性推动机构1b包括导板1b1、第三导柱1b2和抵触弹簧1b3,导板1b1固定安装在第二连接架1c上,第三导柱1b2可滑动的安装在导板1b1上,抵触弹簧1b3用于对第三导柱1b2施加推动刮板1a旋转的弹性力。抵触弹簧1b3套设在第三导柱1b2上,第三导柱1b2上设置有抵触圆板,抵触弹簧1b3的一端与抵触圆板抵触,另一端与导板1b1抵触,通过抵触弹簧1b3的弹性力推动,使得第三导柱1b2推动刮板1a抵触在第二限位板1d上,当遇到刮板1a难以刮动的障碍物时,刮板1a将推动第三导柱1b2,使得第三导柱1b2推动抵触圆板
对抵触弹簧1b3进行压缩。
50.如图11所示,十字滑台3包括竖直滑台3a和水平滑台3b,安装架7固定安装在竖直滑台3a的滑座上,竖直滑台3a固定安装在水平滑台3b的滑座上,水平滑台3b固定安装在第一连接架4上。通过竖直滑台3a对安装架7的竖直运动进行导向,通过水平滑台3b对安装架7的水平运动进行导向,避免安装架7进行左右滑移,竖直滑台3a和水平滑台3b结构相同,竖直滑台3a包括导柱和导座,导柱的顶部与安装架7固定连接,导座固定安装在水平滑台3b的导柱上。
51.如图12所示,拉升机构2包括拉升油缸2a和第二导柱2b,第二导柱2b与安装架7滑动连接,拉升油缸2a固定安装在安装架7上,拉升油缸2a的输出端与刮爪1固定连接。当铲土完成后,通过工人使用操作杆操作拉升油缸2a,使得拉升油缸2a向上拉动第二连接架1c,使得刮爪1整体向上运动,避免刮爪1与地面接触。
52.工作原理:当需要进行调节刮爪1的刮土斜度时,通过工人推动第一限位板6c进行旋转,使得第一限位板6c转动成需要的斜率,在第一限位板6c进行旋转调节的过程中,第一限位板6c将带动导滑柱7a向上或者向下运动,使得导滑柱7a带动拉座5c进行上下运动,拉座5c将通过连接拉板5d推动拉动油缸5a的输出端进行运动,且导滑座5b也将进行辅助滑动,保证第一限位板6c能够进行旋转,在进行调节时,拉动油缸5a的输出端能够被推动,也就是与拉动油缸5a连接的油阀处于打开的状态,该斜率为需要对土墩10刮土的斜率,当斜率调节完成后,再将连接座6d与转座6b之间进行固定连接,进而完成调节;
53.当需要对刮爪1铲土的深度进行调节时,通过拧动两个调节螺母,进而通过啮合推动调节螺杆6a2进行上下移动,调节螺杆6a2将带动推板6a1进行上下运动,调节螺杆6a2将推动推板6a1进行上下运动,使得推板6a1带动转座6b进行运动,进而完成第一限位板6c的高度调节,进而实现了调节刮爪1铲土的深度;
54.调节完成后,通过工人驱动移动车进行运动,移动车带动该设备进行运动时,运动到设定的距离后,通过工人使用操作杆驱动拉动油缸5a进行工作,使得刮板1a被推动到设定的刮土位置,再通过工人使用操作杆驱动拉升油缸2a进行工作,使得刮板1a插入到土墩10内;
55.再通过工人使用操作杆驱动拉动油缸5a进行工作,使得拉动油缸5a的输出端将拉动连接拉板5d,使得连接拉板5d拉动拉座5c进行运动,进而使得拉座5c拉动安装架7进行运动,安装架7将带动导滑柱7a沿着第一限位板6c进行滑动,进而使得刮板1a进行倾斜运动,进而对土墩10进行刮土,使得埋设在葡萄藤上的土壤被刮掉,在刮土的过程中,当遇到刮板1a难以刮动的障碍物时,刮板1a将带动转板1e沿着与第二连接架1c的铰接处进行旋转,使得刮板1a推动弹性推动机构1b,进而使得刮板1a避让开障碍物,避让后,弹性推动机构1b推动刮板1a重新抵触在第二限位板1d上;
56.当铲土完成后,通过工人使用操作杆操作拉升油缸2a,使得拉升油缸2a向上拉动第二连接架1c,使得刮爪1整体向上运动,避免刮爪1与地面接触;
57.再通过工人驱动移动车进行运动,重复上述刮土的过程,进行对土墩10进行持续不断的刮土。
58.通过这种方式进行刮土,相比于传统的刮土方式,工人只需要在最开始调节第一限位板6c的斜率即可,不需要工人在刮土的过程中,进行频繁的自适应调节,降低了工人劳
动的紧张感,进而减少工人的疲劳,并且,由于工人不需要频繁的自适应调节,使得工人在进行刮土时,操作更加方便,大部分的人员都能进行操作,且操作过程更加流畅,不需要犹豫,因此,提高了工人的工作效率,并且该设备由于刮土后的斜率恒定,也可以应用于城市路边的土墩10,使得土墩10整齐平整,利于城市的美观。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
