技术特征:
1.一种基于动态终点策略的ia-star算法的机器人路径规划方法,包括以下步骤:s1、初始化ia-star算法所需信息,包括但不限于地图数据m、起点s、终点e;s2、创建数据表(datafram,df)储存路径数据信息,每一条信息的数据结构为一行向量,尺寸为1*7,每一列的标签分别为临时起点、动态终点、终点、g、h、p、f,其中,g为临时起点距离起点的最短路径长度,h为临时起点距离终点的估算路径长度,其值为临时起点与终点的坐标差的绝对值之和,p为总路径估算长度,其值等于起点经过动态终点到终点的无障碍路径长度,注意p仅在存在动态终点时有效;f为评价指标,由f=g h p计算得到;s3、df数据表中初始化含有一条路径信息,其中,临时起点=s、动态终点=none、终点=e,其余的数据依据定义计算;s4、找到df数据表中f值最小的路径信息,存在多条信息f最小且相等时,取g最大的那条路径信息,记为i,执行s5;s5、是否路径信息i中临时起点等于终点,若是,则执行s9;否则,执行s6;s6、信息i中是否存在动态终点,若是,则执行s6.1;否则,执行s7;s6.1、调用a-star计算临时起点至动态终点之间的路径长度l,并根据结果更新该条信息,即将动态终点赋值于临时起点,重置动态终点,g等于l,h重新计算,p等于0,f重新计算,执行s4;s7、判断临时起点与终点之间是否存在动态终点,若是,则执行s7.1;否则,执行s8;s7.1、向df数据表中新增两条路径信息,其中,临时起点、终点以及g同信息i中的数据,动态终点为s7中找到的动态终点,h设置为0,p跟f依据定义计算,删除路径信息i,执行s4;s8、调用a-star计算临时起点到终点的距离l,更新路径信息i数据:将终点赋值给临时起点,令g =l,h=f=0,f重新计算,执行s4;s9、输出最短路径信息,退出程序。
技术总结
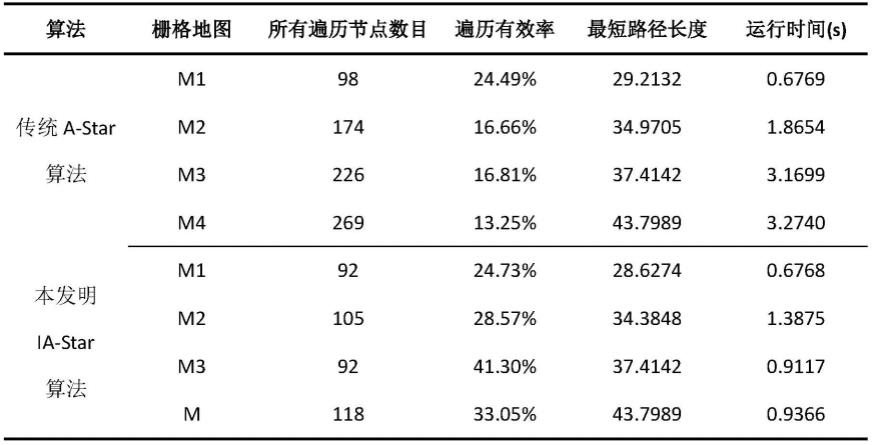
本发明涉及一种基于动态终点策略的IA-Star算法的机器人路径规划方法,传统A-Star遍历的节点是集中于起点至终点的连线方向上的节点集群,在最优路径与起点至终点的连线较为接近时结果较好,实际应用中往往最优路径并不接近于起点至终点的连线。本发明提出一种基于动态终点的改进策略,改进后的A-Star算法在遍历节点的过程中,会动态地调整局部的临时终点,从而避免算法遍历一些无效节点,从而提高算法完成路径规划任务的效率。仿真表明采取新型策略IA-Star算法在解决机器人路径规划问题上的效果进步明显,整体性能优于基本A-Star算法和其他一些改进A-Star算法。Star算法。
技术研发人员:王雷 李东东 蔡劲草 邹阿威 李伟民
受保护的技术使用者:安徽工程大学
技术研发日:2022.05.10
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。