一种基于动态终点策略的ia-star算法的机器人路径规划方法
技术领域
1.本发明涉及机器人路径规划技术领域,具体是一种基于改进a-star算法(improve a-star,ia-star)的移动机器人路径规划方法。
背景技术:
2.路径规划技术是移动机器人研究领域的一个重要组成部分,主要目的是在有障碍物的环境中,根据一定的准则(如路径最短,位置拐点最少,用时最短等),寻求一条从起始位置节点到目标位置节点之间的最优或次优安全无碰路径。
3.路径规划技术的发展在一定程度上标志着机器人智能水平的高低,而路径规划方法的优劣直接影响路径规划效果。
4.目前,国内外许多专家学者都在致力于路径规划算法的研究,常用的优化算法主要有人工势场法、免疫算法、蚁群优化算法、神经网络、a-star算法等。
5.其中,a-star算法是一种静态环境中求解最短路径最有效的直接搜索方法。a-star算法解决路径规划的过程大体上可以概括为:先是通过不断地遍历评价指标f最小的节点,直到遍历到终点节点为止,再使用反向搜索父节点的方法来得到最优路径。其中,某节点的评价指标f等于起点到该节点的实际路径长度g以及该节点到终点的估算路径长度h这两个指标之和。在解决栅格图模型下的路径规划时,通常是定义h为当前节点至终点的坐标之差的绝对值之和。但这会导致a-star算法在遍历节点时,往往其遍历的节点是集中于起点至终点的连线方向上的节点集群。显然,这在最优路径与起点至终点的连线较为接近时,能取得较好的结果,但在实际应用中,往往最优路径并不接近于起点至终点的连线。基于以上存在的问题,本发明提出一种基于动态终点策略的改进a-star(improve a-star,ia-star)算法用于解决机器人路径规划。ia-star在遍历节点的过程中,会动态地调整局部的临时终点,从而避免算法遍历一些无效节点,从而提高算法完成路径规划任务的效率。大量的仿真结果表明,采取本文新型策略的ia-star算法在解决机器人路径规划问题上的效果进步明显,整体性能优于基本a-star算法和其他一些改进a-star算法。
技术实现要素:
6.本发明的目的在于提供一种基于动态终点策略的ia-star算法的机器人路径规划方法,该方法能够克服传统a-star在遍历节点时容易陷入局部无效节点的遍历的缺陷,减少对无效的节点的遍历,从而提高算法的求解速度。
7.首先,提出动态终点这一概念,机器人在移动时,默认情况下,优先向着终点进行移动,当且仅当向终点移动时碰到障碍物,机器人需要额外地花费一定的路径代价以完成避障,因此倘若机器人能提前预知前进路线上存在某障碍物,那么机器人必将以绕开障碍物为首要目的,此时,终点将不适合提供方向信息,因此,该情况下,方向信息将由动态终点来提供。
8.如图1所示,机器人由起点s准备向终点e移动时,检测到存在障碍物b(网状栅格),因此,机器人需要首先考虑如何绕过障碍物b,显然地,无论怎么绕,机器人必将经过障碍物b的边界节点b1或b2,因此,选取障碍物b的边界节点b1和b2的可行邻接节点e2和e3作为动态终点,以提供给机器人一个临时的导向信息。当机器人到达某动态终点后,该动态终点将承接一个新起点的作用,随后重复上述操作,直至机器人到达真正的终点。
9.本发明解决其技术问题所采用的技术方案是:
10.一种基于动态终点策略的ia-star算法的机器人路径规划方法,包括以下步骤:
11.s1、初始化ia-star算法所需信息,包括但不限于地图数据m、起点s、终点e;
12.s2、创建数据表(datafram,df)储存路径数据信息,每一条信息的数据结构为一行向量,尺寸为1*7,每一列的标签分别为临时起点、动态终点、终点、g、h、p、f,其中,g为临时起点距离起点的最短路径长度,h为临时起点距离终点的估算路径长度,其值为临时起点与终点的坐标差的绝对值之和,p为总路径估算长度,其值等于起点经过动态终点到终点的无障碍路径长度,注意p仅在存在动态终点时有效;f为评价指标,由f=g h p计算得到;
13.s3、df数据表中初始化含有一条路径信息,其中,临时起点=s、动态终点=none、终点=e,其余的数据依据定义计算;
14.s4、找到df数据表中f值最小的路径信息,存在多条信息f最小且相等时,取g最大的那条路径信息,记为i,执行s5;
15.s5、是否路径信息i中临时起点等于终点,若是,则执行s9;否则,执行s6;
16.s6、信息i中是否存在动态终点,若是,则执行s6.1;否则,执行s7;
17.s6.1、调用a-star计算临时起点至动态终点之间的路径长度l,并根据结果更新该条信息,即将动态终点赋值于临时起点,重置动态终点,g等于l,h重新计算,p等于0,f重新计算,执行s4;
18.s7、判断临时起点与终点之间是否存在动态终点,若是,则执行s7.1;否则,执行s8;
19.s7.1、向df数据表中新增两条路径信息,其中,临时起点、终点以及g同信息i中的数据,动态终点为s7中找到的动态终点,h设置为0,p跟f依据定义计算,删除路径信息i,执行s4;
20.s8、调用a-star计算临时起点到终点的距离l,更新路径信息i数据:将终点赋值给临时起点,令g =l,h=f=0,f重新计算,执行s4;
21.s9、输出最短路径信息,退出程序。
22.本发明的有益效果是,通过使用动态终点策略,使得ia-star算法在遍历节点时,降低遍历无效节点的几率,从而提高算法的求解速度。
23.下面结合附图和实施例对本发明进一步说明:
附图说明
24.图1为本发明中的动态终点示意图;
25.图2本发明ia-star算法流程图;
26.图3传统a-star算法运行结果;
27.图4本发明ia-star算法运行结果;
28.图5本发明ia-star算法运行结果;
29.图6文献改进a-star算法运行结果。
具体实施方式
30.本发明的目的在于提供一种基于动态终点策略的ia-star算法的机器人路径规划方法,该方法能够克服传统a-star在遍历节点时容易陷入局部无效节点的遍历的缺陷,减少对无效的节点的遍历,从而提高算法的求解速度。
31.本发明解决其技术问题所采用的技术方案是:
32.一种基于动态终点策略的ia-star算法的机器人路径规划方法,包括以下步骤:
33.s1、初始化ia-star算法所需信息,包括但不限于地图数据m、起点s、终点e;
34.s2、创建数据表(dataframe,df)储存路径数据信息,每一条信息的数据结构为一行向量,尺寸为1*7,每一列的标签分别为临时起点、动态终点、终点、g、h、p、f,其中,g为临时起点距离起点的最短路径长度,h为临时起点距离终点的估算路径长度,其值为临时起点与终点的坐标差的绝对值之和,p为总路径估算长度,其值等于起点经过动态终点到终点的无障碍路径长度,注意p仅在存在动态终点时有效;f为评价指标,由f=g h p计算得到;
35.s3、df数据表中初始化含有一条路径信息,其临时起点=s、动态终点=none、终点=e,其余的数据依据定义计算;
36.s4、找到df数据表中f值最小的路径信息,存在多条信息f最小且相等时,取g最大的那条路径信息,记为i,执行s5;
37.s5、是否路径信息i中临时起点等于终点,若是,则执行s9;否则,执行s6;
38.s6、信息i中是否存在动态终点,若是,则执行s6.1;否则,执行s7;
39.s6.1、调用a-star计算临时起点至动态终点之间的路径长度l,并根据结果更新该条信息,即将动态终点赋值于临时起点,重置动态终点,g等于l,h重新计算,p等于0,f重新计算,执行s4;
40.s7、判断临时起点与终点之间是否存在动态终点,若是,则执行s7.1;否则,执行s8;
41.s7.1、向df数据表中新增两条路径信息,其中,临时起点、终点以及g同信息i中的数据,动态终点为s7中找到的动态终点,h设置为0,p跟f依据定义计算,删除路径信息i,执行s4;
42.s8、调用a-star计算临时起点到终点的距离l,更新路径信息i数据:将终点赋值给临时起点,令g =l,h=f=0,f重新计算,执行s4;
43.s9、输出最短路径信息,退出程序。
44.本发明的算法流程图如图2所示。
45.本发明的有益效果是,通过使用动态终点策略,使得ia-star算法在遍历节点时,降低遍历无效节点的几率,从而提高算法的求解速度。
46.本发明的效果可以通过以下仿真实验进一步说明:
47.为验证本方法的正确性和合理性,运用python语言编程,在4个20
×
20的栅格环境模型(m1~m4的最优解路径偏离起点与终点连线的程度逐渐增大)下对该算法进行仿真,并与传统a-star算法进行比较。以左上角节点为起点,右下角节点为终点,仿真结果如图3、图
4以及表1所示(其中,图3跟图4中的红色栅格为被遍历的节点,蓝色为算法所得最优路径节点)。
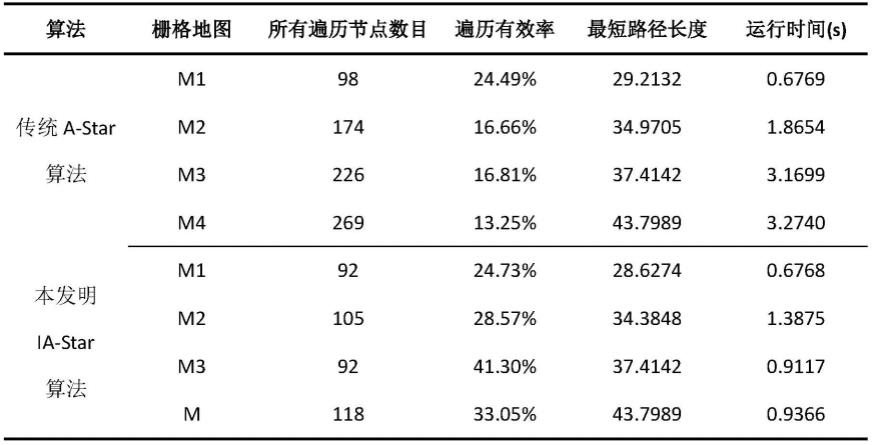
48.表1算法实验数据对比
[0049][0050]
由表1数据可知,当最优路径靠近起点与终点的连线时,本发明ia-star与传统a-star在遍历有效率(最优路径所含节点数/所有遍历节点数)以及运行速度无明显差异,但随着最优路径偏离起点与终点连线的程度越来越大,本发明ia-star无论是遍历有效率还是运行速度,均有了明显的改善效果。
[0051]
为了进一步验证本发明提出的改进算法的有效性,将本发明与另外一种改进的a-star算法进行比较,另一种改进的a-star算法为期刊《计算机集成制造系统》在2022年第1期中1-17页《优化a*与动态窗口法的移动机器人路径规划》中记载的改进遗传算法,在该文章记载的尺寸为50*50栅格环境条件下利用本发明方法进行仿真,并将实验结果进行对比,如图5、图6以及表2所示。
[0052]
表2仿真结果对比
[0053][0054][0055]
通过表2中数据可知,本发明ia-star算法所得最优路径结果为75.3259,优于文献改进算法的所得结果76.1543,且本发明算法的遍历节点个数为225,明显少于文献改进算法的遍历个数262。因此,本发明ia-star算法相对比文献算法,在寻解效果与遍历有效率方面都有着优势。
[0056]
通过上述对比仿真实验可以得出结论:使用本发明ia-star算法的路径规划效率明显优于传统a-star算法。且使用本发明提出的ia-star算法比传统a-star算法和他人改进的a-star算法效果好、速度快,这说明了本发明提出的ia-star算法在路径优化方面的具备一定的可行性与实用性。
[0057]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制;任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同替换、等效变化及修饰,均仍属于本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。