1.本实用新型涉及工业机器人技术领域,具体地涉及一种基于六轴机器人的高精度柔性轴孔装配系统。
背景技术:
2.在制造行业,装配工作的自动化生产得到广泛普及,但是对于高精度轴孔装配往往很难实现自动化生产,究其原因,大多是由于被装配零件的定位精度要求较高,靠机械定位很难将轴与孔对正,无法实现柔性装配,尤其是轴孔装配间隙在0.02mm左右时,装配精度已经超过了六轴机器人的定位精度,靠传统的视觉定位、机械定位的方式很难通过六轴机器人直接实现轴孔装配。
技术实现要素:
3.本实用新型的目的在于克服现有技术存在的缺点,提出设计一种基于六轴机器人的高精度柔性轴孔装配系统,以解决现有技术难以实现轴孔装配自动化生产的问题。
4.本实用新型解决其技术问题所采取的技术方案是:
5.一种基于六轴机器人的高精度柔性轴孔装配系统,包括底座及设置在底座上的六轴机器人;六轴机器人端部与夹具连接;所述连接法兰与夹具之间设置六维度力控传感器和浮动机构。本实用新型采用六轴机器人 六维度力控传感器 浮动机构的方式,实现了轴孔自动装配。
6.进一步的,所述浮动机构位于六维度力控传感器下方,用于辅助夹持工件轴。
7.进一步的,所述六轴机器人与六维度力控传感器通过有线或无线连接,六维度力控传感器将采集的数据传输至六轴机器人,由六轴机器人控制夹具及浮动机构动作。
8.进一步的,所述底座底部通过支腿在底板上,底板上开设连接孔,通过连接孔将底板安装固定。
9.进一步的,所述支腿侧面设置加强板,能够增加六轴机器人的稳固性。
10.本实用新型的技术效果:
11.与现有技术相比,本实用新型的一种基于六轴机器人的高精度柔性轴孔装配系统,采用六轴机器人 六维度力传感器 浮动机构的方式,实现了轴孔自动装配,特别是还能够适用于装配间隙0.02mm左右的轴孔装配,装配精度高,适用范围广。
附图说明
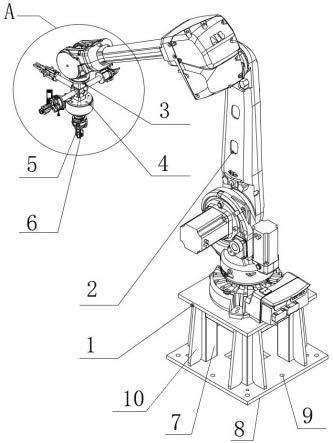
12.图1为本实用新型基于六轴机器人的高精度柔性轴孔装配系统三维图;
13.图2为本实用新型基于六轴机器人的高精度柔性轴孔装配系统主视图;
14.图3为本实用新型图1的a部结构放大图。
15.图中,1、底座;2、六轴机器人;3、连接法兰;4、六维度力控传感器;5、浮动机构;6、夹具;7、支腿;8、底板;9、连接孔;10、加强板。
具体实施方式
16.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面结合说明书附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
17.实施例1:
18.如图1-2所示,本实施例涉及的一种基于六轴机器人的高精度柔性轴孔装配系统,包括底座1及设置在底座1上的六轴机器人2;六轴机器人2端部通过连接法兰3与夹具6连接;六轴机器人2与夹具6之间设置六维度力控传感器4和浮动机构5,所述六轴机器人2与六维度力控传感器4通过有线或无线连接。所述六维度力控传感器4将采集的数据传输至六轴机器人2,由六轴机器人2控制夹具6及浮动机构5动作;所述六轴机器人2能够自由调节机器人手臂末端在笛卡尔坐标系下的三个轴向位置和绕三个坐标轴转动的姿态;所述六维度力控传感器4能够检测笛卡尔坐标系下三个方向的力和三个方向的力矩;所述浮动机构5位于六维度力控传感器4下方,用于辅助夹持工件轴,当工件轴的端部插入工件孔内,此时浮动机构5打开,方便工件轴顺利穿入工件孔内。
19.所述底座1底部通过支腿7安装在底板8上,底板8上设置连接孔9,支腿7侧面设置加强板10,可根据实际需求设计支腿7高度,通过连接孔9将底板8安装固定,可适用于多种场合,通过加强板10增加六轴机器人2的稳固性。
20.工作原理:本实用新型在使用时,通过夹具6夹持工件轴,对已知位置的工件孔进行轴孔装配。由于装配间隙远远小于工件的定位误差和机器人的位置误差,所以工件轴会与工件孔发生碰撞,碰撞力通过六维度力控传感器4反馈给六轴机器人2,六轴机器人2根据反馈调整姿态,直至工件轴的端部插入工件孔内,此时浮动机构5打开,方便工件轴顺利穿入工件孔内。本实用新型采用六轴机器人2 六维度力控传感器4 浮动机构5的方式,实现了轴孔自动装配,特别是还能够适用于装配间隙0.02mm左右的轴孔装配,装配精度高。
21.上述具体实施方式仅是本实用新型的具体个案,本实用新型的专利保护范围包括但不限于上述具体实施方式,任何符合本实用新型权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本实用新型的专利保护范围。
技术特征:
1.一种基于六轴机器人的高精度柔性轴孔装配系统,其特征在于:包括底座(1)及设置在底座(1)上的六轴机器人(2);六轴机器人(2)端部与夹具(6)连接;连接法兰(3)与夹具(6)之间设置六维度力控传感器(4)和浮动机构(5)。2.根据权利要求1所述的基于六轴机器人的高精度柔性轴孔装配系统,其特征在于:所述浮动机构(5)位于六维度力控传感器(4)下方。3.根据权利要求1所述的基于六轴机器人的高精度柔性轴孔装配系统,其特征在于:所述六轴机器人(2)与六维度力控传感器(4)通过有线或无线连接。4.根据权利要求1或2或3所述的基于六轴机器人的高精度柔性轴孔装配系统,其特征在于:所述底座(1)底部通过支腿(7)在底板(8)上,底板(8)上开设连接孔(9)。5.根据权利要求4所述的基于六轴机器人的高精度柔性轴孔装配系统,其特征在于:所述支腿(7)侧面设置加强板(10)。
技术总结
本实用新型涉及工业机器人技术领域,具体地涉及一种基于六轴机器人的高精度柔性轴孔装配系统,包括底座及设置在底座上的六轴机器人;六轴机器人端部与夹具连接;所述连接法兰与夹具之间设置六维度力控传感器和浮动机构;所述浮动机构位于六维度力控传感器下方。本实用新型采用六轴机器人 六维度力传感器 浮动机构的方式,实现了轴孔自动装配,特别是还能够适用于装配间隙0.02mm左右的轴孔装配,装配精度高,适用范围广。适用范围广。适用范围广。
技术研发人员:张志 徐健 谭丽辉 崔姗姗 李承东 亓文强 桑汶宝 孙成斌 宁方成 郭庆武
受保护的技术使用者:山东德晟机器人股份有限公司
技术研发日:2022.07.04
技术公布日:2022/10/21
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。