1.本发明涉及车辆辅助驾驶研究领域,尤其是涉及单车道舒适巡航方法及系统。
背景技术:
2.目前在车辆上使用的l2辅助驾驶只能实现单车道自适应巡航,如跟车、定速、通过摄像头识别限速牌进行降速等等,但是l2辅助驾驶如acc(自适应巡航) aeb(紧急制动) lka(车道保持),并不会考虑道路的实际情况,车辆在遇到颠簸路段、转弯路段、上下坡路段、限速路段时,l2辅助驾驶会给驾乘人员带来很大的不适感或者危险。
技术实现要素:
3.本发明目的在于提供一种单车道舒适巡航方法,本发明的另一目的在于提供一种单车道舒适巡航系统。
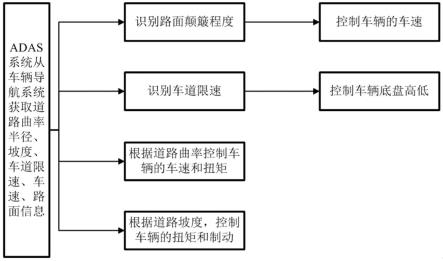
4.为实现上述目的,本发明采取下述技术方案:本发明所述的单车道舒适巡航方法,包括以下步骤:s1,adas系统从车辆导航系统获取道路曲率半径、坡度、车道限速、车速、路面信息;s2,识别路面颠簸程度,发送信息到可调节悬架系统,控制车辆底盘高低;s3,识别车道限速,根据车道限速与当前车速情况,控制车辆的车速;s4,根据道路曲率控制车辆的车速和扭矩;s5,根据道路坡度,控制车辆的扭矩和制动。
5.车辆遇到其他的道路情况,如红路等、路口、行人等信息与目前的l2辅助驾驶策略一样。本申请与目前的l2辅助驾驶策略的区别在于增加了对颠簸路段、车道限速、弯道路段、坡道路段的辅助驾驶策略。
6.进一步地,s2步中,当路面颠簸,所述可调节悬架系统控制车辆底盘抬高,调整为舒适模式;当路面平整,且当前车速大于既定的安全车速,可调节悬架系统控制车辆底盘降低,调整为运动模式。
7.进一步地,s3步中,当车道限速低于驾驶员设定的自适应巡航车速,判断v0t 1/2gt2 l
1vx
*t时,控制车辆降速至小于等于车道限速;当车道限速大于等于当前车速时,控制车辆以当前车速行驶;其中,v0为当前车速;g为车辆加速度;t=(v
0-v)/g,为降为车道限速v的时间;v
x
为后车车速;l1为设定的前后车安全距离。
8.进一步地,s4步中,当m v0²
/r f0≥f时,控制车辆降速至最小安全车速;其中m为车辆质量,r为道路曲率半径,f摩擦力为由车辆esp系统提供当前道路临界打滑的参考摩擦力,f0为当前道路的安全摩擦力。
9.进一步地,s5步中,当判断为下坡时,控制车辆降扭矩和或制动。
10.本发明所述的单车道舒适巡航系统,包括导航系统、可调节悬架系统、adas系统、
车身稳定系统、电子转向系统、发动机控制系统;其中,所述导航系统用于识别和传递道路曲率、坡度、车道限速、车速信息;所述可调节悬架系统用于控制车辆底盘的调整;所述adas系统搭载有通用的l2辅助驾驶功能,且能够根据导航系统提供的信息,识别坑洼路面、凸起路面、颠簸路面;所述车身稳定系统用于控制车辆制动的调整;所述电子转向系统用于在横向车道保持车辆;所述发动机控制系统用于控制车辆扭矩的调整。
11.所述导航系统与所述adas系统连接,adas系统与所述可调节悬架系统、所述车身稳定系统、所述电子转向系统、所述发动机控制系统连接。
12.本发明优点在于针对l2辅助驾驶无法在多种路况下带给驾乘人员舒适驾乘体验的缺点,提供了增强型的辅助驾驶方法策略,提前将路段信息输入,在车辆经过坑洼不平、凸起路面、颠簸路面、弯道、限度路段时,加强辅助驾驶系统对车辆的操控能力,为驾乘人员提供舒适的驾乘体验。
附图说明
13.图1是本发明所述方法的流程图。
14.图2是本发明所述系统的框图。
具体实施方式
15.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.如图1所示,本发明所述的单车道舒适巡航方法,包括以下步骤:s1,车辆导航系统的摄像头可获取道路曲率半径、坡度、车道限速、车速、路面情况等信息;adas系统从车辆导航系统获取道路曲率半径、坡度、车道限速、车速、路面信息后;s2,识别路面颠簸程度,当路面颠簸不平整,发送信息给可调节悬架系统控制车辆底盘抬高,调整为舒适模式;当路面平整,且当前车速大于既定安全车速,可调节悬架系统控制车辆底盘降低,调整为运动模式。
17.s3,识别车道限速,当车道限速低于驾驶员设定的自适应巡航车速,判断v0t 1/2gt2 l
1vx
*t时,控制车辆降速至小于等于车道限速;判断v0t 1/2gt2 l1≤v
x
*t时,不允许车辆执行降速;当车道限速大于等于当前车速时,控制车辆以当前车速行驶;其中,v0为当前车速;g为发送给esp的车辆加速度;t=(v
0-v)/g,t为降为车道限速v的时间;v
x
为后车车速;l1为设定的前后车安全距离,大约为1m。
18.s4,根据道路曲率,当mv0²
/r f0≥f时,主动控制车辆降速至最小安全车速;否则不执行降速,降扭矩的操作。其中m为车辆质量,r为道路曲率半径,f摩擦力为由车辆esp系统提供当前道路临界打滑的参考摩擦力,f0为当前道路的安全摩擦力。
19.s5,根据道路坡度,当判断为下坡时,adas发送降扭信息给esp&ecu,控制车辆降扭矩和或制动,避免超速;如果是上坡,不执行动作。
20.车辆遇到其他的道路情况,如红路等、路口、行人等信息与目前的l2辅助驾驶策略一样。本申请与目前的l2辅助驾驶策略的区别在于增加了对颠簸路段、车道限速、弯道路
段、坡道路段的辅助驾驶策略。
21.如图2所示,本发明所述的单车道舒适巡航系统,包括导航系统、可调节悬架系统、adas系统、车身稳定系统、电子转向系统、发动机控制系统;导航系统与adas系统连接,adas系统与可调节悬架系统、车身稳定系统、电子转向系统、发动机控制系统连接。导航系统用于识别和传递道路曲率、坡度、车道限速、车速信息,并将信息传递给adas系统;adas系统搭载有通用的l2辅助驾驶功能,且能够根据导航系统提供的信息,识别坑洼路面、凸起路面、颠簸路面,对识别到的路面信息,根据内置的车辆辅助驾驶控制策略,向执行单元发送指令,由执行单元完成相应的动作。其中,可调节悬架系统在收到adas系统信息后,控制车辆底盘的调整;当路面颠簸,控制车辆底盘抬高,调整为舒适模式;当路面平整,且当前车速大于临界车速,控制车辆底盘降低,调整为运动模式。车身稳定系统负责根据adas系统信息控制车辆制动的调整;电子转向系统用于在横向车道保持车辆;发动机控制系统用于控制车辆扭矩的调整。
技术特征:
1.一种单车道舒适巡航方法,其特征在于,包括以下步骤:s1,adas系统从车辆导航系统获取道路曲率半径、坡度、车道限速、车速、路面信息;s2,识别路面颠簸程度,发送信息到可调节悬架系统,控制车辆底盘高低;s3,识别车道限速,根据车道限速与当前车速情况,控制车辆的车速;s4,根据道路曲率控制车辆的车速和扭矩;s5,根据道路坡度,控制车辆的扭矩和制动。2.根据权利要求1所述的单车道舒适巡航系统及方法,其特征在于:s2步中,当路面颠簸,所述可调节悬架系统控制车辆底盘抬高,调整为舒适模式;当路面平整,且当前车速大于既定的安全车速,可调节悬架系统控制车辆底盘降低,调整为运动模式。3.根据权利要求1所述的单车道舒适巡航系统及方法,其特征在于:s3步中,当车道限速低于驾驶员设定的自适应巡航车速,判断v0t 1/2gt2 l
1vx
*t时,控制车辆降速至小于等于车道限速;当车道限速大于等于当前车速时,控制车辆以当前车速行驶;其中,v0为当前车速;g为车辆加速度;t=(v
0-v)/g,为降为车道限速v的时间;v
x
为后车车速;l1为设定的前后车安全距离。4.根据权利要求1所述的单车道舒适巡航系统及方法,其特征在于:s4步中,当m v0²
/r f0≥f时,控制车辆降速至最小安全车速;其中m为车辆质量,r为道路曲率半径,f摩擦力为由车辆esp系统提供当前道路临界打滑的参考摩擦力,f0为当前道路的安全摩擦力。5.根据权利要求1所述的单车道舒适巡航系统及方法,其特征在于:s5步中,当判断为下坡时,控制车辆降扭矩和或制动。6.一种单车道舒适巡航系统,其特征在于:包括导航系统、可调节悬架系统、adas系统、车身稳定系统、电子转向系统、发动机控制系统;其中,所述导航系统用于识别和传递道路曲率、坡度、车道限速、车速信息;所述可调节悬架系统用于控制车辆底盘的调整;所述adas系统搭载有通用的l2辅助驾驶功能,且能够根据导航系统提供的信息,识别坑洼路面、凸起路面、颠簸路面;所述车身稳定系统用于控制车辆制动的调整;所述电子转向系统用于在横向车道保持车辆;所述发动机控制系统用于控制车辆扭矩的调整。7.根据权利要求6所述的单车道舒适巡航系统,其特征在于:所述导航系统与所述adas系统连接,adas系统与所述可调节悬架系统、所述车身稳定系统、所述电子转向系统、所述发动机控制系统连接。
技术总结
本发明公开了一种单车道舒适巡航方法及系统,包括导航系统、可调节悬架系统、ADAS系统、车身稳定系统、电子转向系统、发动机控制系统。ADAS系统从导航系统获取道路曲率半径、坡度、车道限速、车速、路面信息;识别路面颠簸程度,发送信息到可调节悬架系统,控制车辆底盘高低;根据车道限速与当前车速,控制车辆的车速;根据道路曲率控制车辆的车速和扭矩;根据道路坡度,控制车辆的扭矩和制动。本发明优点在于针对L2辅助驾驶无法在多种路况下带给驾乘人员舒适体验的缺点,提供了增强型的辅助驾驶方法策略,在车辆经过坑洼不平、凸起路面、颠簸路面、弯道、限度路段时,加强辅助驾驶系统对车辆的操控能力,为驾乘人员提供舒适的驾乘体验。验。验。
技术研发人员:董耀飞 赵静艺 朱亚东 赵珂 陈素梅 耿大伟 胡志冬 周璞 张中原 苏得秀 马涛 邹鹏飞
受保护的技术使用者:郑州日产汽车有限公司
技术研发日:2022.06.23
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。