技术特征:
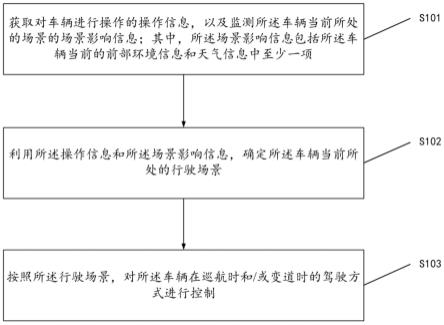
1.一种车辆的智能驾驶方法,其特征在于,包括:获取对车辆进行操作的操作信息,以及监测所述车辆当前所处的场景的场景影响信息;其中,所述场景影响信息包括所述车辆当前的车前环境信息和天气信息中至少一项;利用所述操作信息和所述场景影响信息,确定所述车辆当前所处的行驶场景;按照所述行驶场景,对所述车辆在巡航时和/或变道时的驾驶方式进行控制。2.根据权利要求1所述的方法,其特征在于,所述行驶场景包括:雨雪天湿滑路面或非雨雪天湿滑路面;所述利用所述操作信息和所述场景影响信息,确定所述车辆当前所处的行驶场景,包括:利用所述操作信息对所述车辆当前所处的行驶场景进行判断,得到第一预测场景;利用所述车前环境信息对所述车辆当前所处的行驶场景进行判断,得到第二预测场景;利用所述天气信息对所述车辆当前所处的行驶场景进行判断,得到第三预测场景;利用为所述第一预测场景、所述第二预测场景和所述第三预测场景各自分别预设的场景权重,通过将所述第二预测场景和所述第三预测场景中至少一项的场景权重与所述第一预测场景的场景权重进行比对,判断所述行驶场景为雨雪天湿滑路面或非雨雪天湿滑路面。3.根据权利要求2所述的方法,其特征在于,所述按照所述行驶场景,对所述车辆在巡航时和/或变道时的驾驶方式进行控制,包括:确定当前所述车辆在巡航时与前车之间的跟车距离和所述车辆的车速上限;确定当前所述车辆在变道时与除所述车辆之外的其他车辆之间的碰撞时长和所述车辆的变道速度;根据所述行驶场景,调整所述跟车距离、所述车速上限、所述碰撞时长和所述变道速度中的至少一项。4.根据权利要求3所述的方法,其特征在于,所述根据所述行驶场景,调整所述跟车距离、所述车速上限、所述碰撞时长和所述变道速度中的至少一项,包括:响应于确定所述行驶场景为非雨雪天湿滑路面,执行包括将所述跟车距离调整为第一距离,将所述车速上限调整为第一车速,将所述碰撞时长调整为第一时长,以及将所述变道速度调整为第一速度在内的至少一项调整。5.根据权利要求4所述的方法,其特征在于,所述根据所述行驶场景,调整所述跟车距离、所述车速上限、所述碰撞时长和所述变道速度中的至少一项,还包括:响应于确定所述行驶场景为雨雪天湿滑路面,执行包括将所述跟车距离调整为第二距离,将所述车速上限调整为第二车速,将所述碰撞时长调整为第二时长,以及将所述变道速度调整为第二速度在内的至少一项调整;其中,所述第二距离大于所述第一距离,所述第二车速小于所述第一车速,所述第二时间大于所述第一时间,所述第二速度小于所述第一速度。6.根据权利要求5所述的方法,其特征在于,所述确定所述车辆当前所处的行驶场景之后,还包括:根据所述操作信息确定所述第一预测场景的第一预测等级,根据所述车前环境信息确定所述第二预测场景的第二预测等级,根据所述天气信息确定所述第三预测场景的第三预测等级;
利用为所述第一预测等级、所述第二预测等级和所述第三预测等级各自分别预设的等级权重,通过将所述第二预测等级和所述第三预测等级中至少一项的等级权重与所述第一预测等级的等级权重进行比对,得到关于当前的所述行驶场景的程度等级;其中,所述程度等级用于对确定出的所述当前的行驶场景进行划分;所述按照所述行驶场景,对所述车辆在巡航时和/或变道时的驾驶方式进行控制,包括:根据所述行驶场景的程度等级,调整所述车辆在所述当前的行驶场景下巡航时和/或变道时的驾驶方式。7.根据权利要求6所述的方法,其特征在于,所述利用所述程度等级,调整所述车辆在所述当前的行驶场景下巡航时和/或变道时的驾驶方式,包括:响应于确定所述行驶场景为所述雨雪天湿滑路面,根据所述程度等级,调整所述第二距离、所述第二车速、所述第二时间和所述第二速度中的至少一种。8.一种车辆的智能驾驶装置,其特征在于,包括:信息获取模块、判断模块和驾驶方式设置模块;其中,所述信息获取模块,被配置为,获取对车辆进行操作的操作信息,以及监测所述车辆当前所处的场景的场景影响信息;其中,所述场景影响信息包括所述车辆当前的车前环境信息和天气信息中至少一项;所述判断模块,被配置为,利用所述操作信息和所述场景影响信息,确定所述车辆当前所处的行驶场景;所述驾驶方式设置模块,被配置为,按照所述行驶场景,对所述车辆在巡航时和/或变道时的驾驶方式进行控制。9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可由所述处理器执行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任意一项所述的方法。10.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使计算机执行根据权利要求1至7中任意一项所述的方法。
技术总结
本申请提供一种车辆的智能驾驶方法、装置、设备及存储介质;所述方法包括:获取对车辆进行操作的操作信息,以及监测所述车辆当前所处的场景的场景影响信息;其中,所述场景影响信息包括所述车辆当前的车前环境信息和天气信息中至少一项;利用所述操作信息和所述场景影响信息,确定所述车辆当前所处的行驶场景;按照所述行驶场景,对所述车辆在巡航时和/或变道时的驾驶方式进行控制。可以看出,本方法综合考虑了驾驶者的主观判断和各类传感器的判断来对当前的行驶场景进行判定,使得行驶场景的判定更加准确,并可以针对不同的行驶场景来采取不同的驾驶方式,提高了智能驾驶安全性。性。性。
技术研发人员:范志超 杨振
受保护的技术使用者:长城汽车股份有限公司
技术研发日:2022.09.16
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。