一种l型电池封装设备及封装方法
技术领域
1.本发明涉及电池封装设备技术领域,特别是涉及一种l型电池封装设备及封装方法。
背景技术:
2.相关技术中,软包装锂电池具有电压高、比能量高、循环使用次数多、存储时间长等优点,不仅在便携式电子设备上广泛应用,而且也广泛应用于电动汽车,电动自行车以及电动工具等大中型电动设备方面。目前,市场上l型软包锂电池封装设备仍然还是采用转盘式制作,在夹具循环结构上采用转盘式八工位制作,导致成本增加,换型时间长,调试不方便。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种l型电池封装设备,能够有效降低成本,并降低调试难度。
4.本发明还提出一种基于前述l型电池封装设备的l型电池封装方法。
5.根据本发明的一方面实施例的l型电池封装设备,包括:铝塑膜成型部分,用于将铝塑膜裁切成单片铝塑膜并将单片铝塑膜冲制成壳体;入壳上电芯部分,包括入壳机械手、翻转组件和取电芯机器人,所述入壳机械手设置于所述翻转组件的一侧,所述入壳机械手用于将冲制完成的所述壳体放置到所述翻转组件内,所述取电芯机器人用于将裸电芯放置到所述翻转组件中的壳体内;其中,所述翻转组件包括对折夹具和直线驱动机构,所述对折夹具用于将所述壳体对折,所述直线驱动机构用于带动所述对折夹具在平面内往复运动;封装部分,包括顶封机构,所述顶封机构设置于所述取电芯机器人的一侧,且所述顶封机构位于所述直线驱动机构的行程范围内。
6.进一步地,所述对折夹具包括活动板、固定板及翻转机构,所述翻转机构驱动所述活动板翻转,以实现对折动作。
7.进一步地,所述直线驱动机构为线电机模组,所述对折夹具与所述线电机模组的输出端连接,所述线电机模组用于驱动所述对折夹具往复运动。
8.进一步地,所述入壳上电芯部分还包括第一ccd检测装置,所述第一ccd检测装置设置于所述顶封机构的一侧。
9.进一步地,所述封装部分包括还l型封装机构及中转机械手,所述l型封装机构设置于所述顶封机构的一侧,所述中转机械手用于将电池从所述顶封机构移送至所述l型封装机构,以进行l型边的封装工作。
10.进一步地,所述l型封装机构包括电池平台、上封头、下封头、上封装驱动机构及下封装驱动机构,所述电池平台安装有真空吸盘,所述上封头和所述下封头匹配,所述下封装驱动机构通过驱动所述下封头顶起,所述上封装驱动机构通过驱动所述上封头下压,以完成l型边的封装。
11.进一步地,所述铝塑膜成型部分包括铝塑膜放卷机构、铝塑膜裁切机构、送膜机械手及冲壳机构,所述铝塑膜裁切机构用于将铝塑膜放卷机构上的铝塑膜料带裁切成单片铝塑膜,所述冲壳机构设置于所述铝塑膜裁切机构的一侧,所述送膜机械手用于将所述单片铝塑膜放置到所述冲壳机构内。
12.进一步地,还包括电池切边、测试及检测部分,所述电池切边、测试及检测部分包括依次设置的切边机构、短路测试机构及第二ccd检测装置。
13.进一步地,还包括贴膜出料部分,所述贴膜出料部分包括贴膜机构,所述贴膜机构用于给电池贴膜。
14.本发明另一方面实施例的l型电池封装方法,包括如下步骤:将铝塑膜裁切成单片铝塑膜并将单片铝塑膜冲制成壳体,该壳体具有用于放置裸电芯的凹槽;将壳体放置到对折夹具内,并将裸电芯放置到壳体内,利用对折夹具将壳体对折,然后利用对折夹具将裸电芯和对折后的壳体一同输送到顶封机构处进行电池的顶边封装工作,当顶封机构的气缸夹边将电池的侧边夹紧后,对折夹具打开并复位;顶封机构的电池托板升起并将裸电芯和对折后的壳体托住,然后进行电池的顶边封装工作;依次对电池进行l型边封装、侧边封装和角封工作;对电池的侧边进行裁切,裁切完成后将电池输送到测试工位进行短路测试。
15.前述的l型电池封装设备,至少具有如下有益效果:翻转组件包括对折夹具和直线驱动机构,直线驱动机构驱动对折夹具在顶封工位和上壳体工位之间往复运动。利用直线驱动机构驱动单个夹具往复运动,速度快、精度高。同时,利用单个夹具往复运动实现从壳体对折和顶边封装的工序转换,相较于转盘式结构,本技术中的电池封装设备结构简单,换型方便,调试简单,成本更低,而且能够有效缩小设备的占地空间。
16.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
17.下面结合附图和实施例对本发明做进一步的说明,其中:
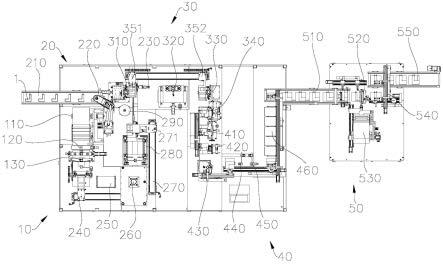
18.图1为本发明一方面实施例的l型电池封装设备的俯视示意图;
19.图2为本发明一方面实施例的l型电池封装设备的立体示意图;
20.图3为本发明一方面实施例的l型电池封装设备另一角度的立体示意图;
21.图4为本发明一方面实施例的l型电池封装设备另一角度的立体示意图;
22.图5为图4中a部分的局部放大示意图;
23.图6为本发明一方面实施例的l型电池封装设备中顶封机构和翻转组件的结构示意图;
24.图7为图6另一角度的结构示意图;
25.图8为本发明一方面实施例的l型电池封装设备中l型封装机构的结构示意图;
26.图9为l型电池封装设备中l型封装机构的正视示意图;
27.图10为l型电池封装设备中l型封装机构的右视示意图。
28.附图标记:
29.1、裸电芯;2、铝塑膜料带;
30.10、铝塑膜成型部分;
31.110、铝塑膜放卷机构;120、铝塑膜除尘机构;130、铝塑膜裁切机构;
32.20、入壳上电芯部分;
33.210、裸电芯输送带;220、取电芯机器人;221、吸盘;222、压板;230、翻转组件;231、活动板;232、固定板;233、翻转机构;234、凹槽;235、直线驱动机构;236、升降驱动机构;240、送膜机械手;250、铝塑膜ng收集平台;260、冲壳机构;270、入壳滑台;271、入壳机械手;280、顶边裁切机构;290、第一ccd检测装置;291、检测平台;
34.30、封装部分;
35.310、顶封机构;311、封装本体;312、气缸夹边;313、电池托板;320、l型封装机构;321、基架;322、电池平台;323、上封头;324、下封头;325、发热体;326、上封装驱动机构;327、下封装驱动机构;328、导向件;330、侧封机构;340、角封机构;351、第一中转机械手;252、第二中转机械手;
36.40、电池切边、测试及检测部分;
37.410、侧边裁切机构;420、短路测试机构;430、第二ccd检测装置;440、喷码机构;450、扫码机构;460、ng分选机构;
38.50、贴膜出料部分;
39.510、中转输送带;520、u型贴膜机构;530、保护膜放卷机构;540、下料机械手;550、下料输送带。
具体实施方式
40.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
41.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
42.在本发明的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
43.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
44.本发明的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
45.参见图1至图4所示,本发明一方面实施例公开了一种l型电池封装设备,该l型电
池封装设备包括铝塑膜成型部分10、入壳上电芯部分20及封装部分30。
46.具体的,铝塑膜成型部分10用于将铝塑膜裁切成单片铝塑膜并将单片铝塑膜冲制成壳体;入壳上电芯部分20包括入壳滑台270、入壳机械手271、翻转组件230和取电芯机器人220,入壳滑台270设置于冲壳机构260的一侧,入壳机械手271安装于入壳滑台270,入壳机械手271能够沿入壳滑台270滑动,入壳机械手271位于翻转组件230的一侧,入壳机械手271用于将冲制完成的壳体放置到翻转组件230内,取电芯机器人220用于将裸电芯1放置到翻转组件230中的壳体内;其中,翻转组件230包括对折夹具和直线驱动机构235,对折夹具用于将壳体对折,直线驱动机构235用于带动对折夹具往复运动;封装部分30包括顶封机构310,顶封机构310设置于取电芯机器人220的一侧,且顶封机构310位于直线驱动机构235的行程范围内,顶封机构310用于对电池的顶边进行封边。应当理解,电池的顶边指的是与极耳位置对应的边。
47.前述的l型电池封装设备中,翻转组件230包括对折夹具和直线驱动机构235,直线驱动机构235驱动对折夹具往复运动,以实现铝塑膜壳体对折和顶边封装的工序转换。利用直线驱动机构235驱动单个夹具往复运动,速度快、精度高。同时,利用单个夹具实现壳体对折动作和顶边封装动作之间的工序转换,机构简单,调试方便,而且能够有效缩小设备的占地空间。
48.请继续参见图1至图4,l型电池封装设备还包括电池切边、测试及检测部分40和贴膜出料部分50。其中,电池切边、测试及检测部分40包括依次设置的侧边裁切机构410、短路测试机构420及第二ccd检测装置430。侧边裁切机构410用于电池侧封边裁切,裁切完成后由机械手将侧封边裁切工位的电池移送至短路测试机构420的测试工位进行短路测试;测试完成后,再由机械手将电池传送至第二ccd检测装置430的检测工位拍照,以检测极耳位置。贴膜出料部分50用于给电池贴保护膜。其中,贴膜出料部分50包括保护膜放卷机构530、贴膜机构520、下料机械手540及下料输送带550,贴膜机构用于给电池贴保护膜。
49.本实施例中,如图1至图3所示,电池切边、测试及检测部分40包括侧边裁切机构410、短路测试机构420、第二ccd检测装置430、正面(或反面)喷码机构450、正面(或反面)扫码机构、ng分选机构460。
50.一些实施例中,参见图1和图2所示,铝塑膜成型部分10包括铝塑膜放卷机构110、铝塑膜裁切机构130、送膜机械手240及冲壳机构260,铝塑膜裁切机构130用于将铝塑膜放卷机构110上的铝塑膜料带2裁切成单片铝塑膜,冲壳机构260设置于铝塑膜裁切机构130的一侧,送膜机械手240用于将单片铝塑膜放移送到冲壳机构260内。铝塑膜放卷机构110上安装有铝塑膜料带2,铝塑膜裁切机构130将铝塑膜料带2裁切成指定大小的单片铝塑膜后,送膜机械手240将该单片铝塑膜转送到冲壳机构260的指定位置,随后冲壳机构260对该单片铝塑膜进行冲壳,以使该单片铝塑膜冲制成壳体,该壳体具有与裸电芯1相匹配的凹槽234,裸电芯1能够放置与壳体的凹槽234中。
51.本实施例中,冲壳机构260包括两个凸模和两个凹槽234,使得冲制得到的壳体具有两个凹槽234。折壳式,裸电芯1放置到其中一个凹槽234中,并在翻转机构233的作用下,该壳体对折,两个凹槽234将裸电芯1包裹于其中。应当理解,由于该壳体通过冲制得到,单个凹槽234的深度不宜过深,因此,将单片铝塑膜冲制成具有两个凹槽234的壳体,得到的壳体能够适用于厚度较大的裸电芯1的封装工作中。
52.另外一些实施例中,冲壳机构260包括一个凸模和一个凹模,对应冲制得到具有一个凹槽234的壳体。
53.本实施例中,铝塑膜成型部分10包括铝塑膜放卷机构110、铝塑膜除尘机构120、牵引送膜机构、铝塑膜裁切机构130、铝塑膜ng收集平台250及冲壳机构260。其中,铝塑膜除尘机构120能够除尘铝塑膜上的粉尘;铝塑膜ng收集平台250用于收集不合格的单片铝塑膜。
54.进一步地,铝塑膜成型部分10还包括顶边裁切机构280,该顶边裁切机构280设置于冲壳机构260和翻转组件230之间的位置。当冲壳机构260将单片铝塑膜冲制为壳体后,入壳机械手271将壳体移送至顶边裁切机构280处,顶边裁切机构280对壳体的顶边进行裁切修剪。其中,壳体的顶边指的是与裸电芯1极耳位置对应的边。顶边裁切机构280位于靠近壳体的顶边的一侧,不需转动壳体的角度,顶边裁切机构280便能够对壳体的顶边进行裁切,有利于保证裁切精度,同时简化封装设备的结构;由于不需转动壳体的角度,也方便了设备换型、简化调试步骤。
55.一些实施例中,参见图6和图7所示,对折夹具包括活动板231、固定板232及翻转机构233,翻转机构233驱动活动板231翻转,以实现对折动作。其中,活动板231和固定板232上均设置有真空吸附件,以使铝塑膜贴住活动板231或固定板232,从而保证了翻转组件230中的壳体能够顺利对折。
56.本实施例中,请继续参见图6和图7所示,翻转组件230还包括升降驱动机构236,翻转机构233安装于该升降驱动机构236上,升降驱动机构236用于驱动翻转机构233和对折夹具升降。具体的,翻转机构233和升降驱动机构236包括伺服电机,伺服电机具有速度快、噪音小且精度高的优点,是气缸驱动所不具备的。其中,直线驱动机构235的一端位于顶边裁切机构280的一侧,此位置记为入壳工位,在此工位,入壳机械手271将顶边裁切完成的壳体放入到对折夹具中;直线驱动机构235的另一端位于顶封机构310处,此位置记为顶封工位,使得对折完成后的壳体能够直接移动到顶封工位进行顶边封边工作,以提供封装效率。由图示可知,升降驱动机构236与直线驱动机构235连接,直线驱动机构235能够驱动升降驱动机构236和对折夹具在入壳工位和顶封工位往复运动。
57.本实施例中,直线驱动机构235为线电机模组,对折夹具与线电机模组的输出端连接,线电机模组用于驱动对折夹具往复运动。相较于传统的转盘式的夹具循环,本实施例利用线电机模组驱动单个对折夹具往复运动来实现夹具循环功能,减少了夹具数量,交底了设备成本。同时,通过线电机模组驱动对折夹具往复运动的运动控制简单,能够方便夹具调试以及售后维护。
58.取电芯机器人220抓取裸电芯1时没有对裸电芯1进行精确定位,取电芯机器人220无法直接将裸电芯1准确放入到翻转组件230的壳体中,因此取电芯机器人220在将裸电芯1放入到壳体内之前,需要先对裸电芯1进行定位纠偏。鉴于此,参见图1、图6和图7所示,入壳上电芯部分20还包括第一ccd检测装置290,第一ccd检测装置290设置于顶封机构310的一侧。通过在顶封机构310的一侧设置第一ccd检测装置290对裸电芯1进行定位纠偏,以方便取电芯机器人220能够将裸电芯1准确放入到壳体中。工作时,取电芯机器人220先从来料输送带中抓取裸电芯1,随后将裸电芯1放置在第一ccd检测装置290的检测平台291上,利用第一ccd检测装置290对裸电芯1进行准确定位,然后取电芯机器人220再从检测平台291上抓取裸电芯1并将裸电芯1放入到翻转组件230的壳体中。
59.其中,参见图4和图5所示,取电芯机器人220还包括吸盘221和压板222,吸盘221用于吸附裸电芯1,裸电芯1放入到壳体中后,取电芯机器人220通过压板222压住裸电芯1,此时,对折夹具动作,以将壳体对折。
60.前述实施例中,顶封机构310包括封装本体311、气缸夹边312和电池托板313。其中,封装本体311用于封装电池的顶边;气缸夹边312包括支撑件和可上下移动的压块,压块能更将铝塑膜侧边压在支撑件上;电池托板313能够升降,当翻转组件230复位后,电池托板313顶起并托住电池(即裸电芯和对折后的壳体)。入壳机械手271将顶边裁切完成后的壳体放入对折夹具;对折夹具走到放电芯工位后,取电芯机器人220将经第一ccd检测装置290检测定位后的裸电芯1精准放入对折夹具中的铝塑膜壳体内,最后取电芯机器人220上的压板222压住裸电芯1后,通过对折夹具完成壳体对折;线电机模组将对折夹具转移到顶封工位,顶封机构310的上封头向下运动以压紧铝塑膜的顶边,同时气缸夹边312夹紧铝塑膜侧边后,对折夹具的活动板231打开,对折夹具下降(同时卸掉真空),然后翻转组件230复位至上铝塑膜位置(上壳体工位)。翻转组件230回到安全位置后,顶封机构310的电池托板313顶起以托住电池;以上动作往复循环,以实现转盘式夹具结构的功能。
61.其中,入壳机械手271包括真空吸盘,能够吸附壳体。
62.一些实施例中,参见图8至图10所示,封装部分30包括还l型封装机构320及中转机械手,l型封装机构320设置于顶封机构310的一侧,中转机械手用于将电池从顶封机构310转移至l型封装机构320,以进行l型边的封装工作。本实施例中,中转机械手包括第一中转机械手351和第二中转机械手252,第一中转机械手351用于将顶封工位的电池移送到l型封装机构320上;第二中转机械手252用于将电池从l型封装机构320移送至侧封机构330上。
63.一些实施例中,l型封装机构320包括导向件328、基架321、电池平台322、上封头323、下封头324、上封装驱动机构326和下封装驱动机构327,电池平台322设置于基架321上,电池平台322安装有真空吸盘,上封头323和下封头324匹配,下封装驱动机构327通过导向件328与基架321连接,下封装驱动机构327用于驱动下封头324顶起,上封装驱动机构326通过导向件328安装于基架321上,上封装驱动机构326用于驱动上封头323下压,以完成l型封装。其中,导向件328能够为上封装驱动机构326或下封装驱动机构327提供精密导向。本实施例中,上封头323和下封头324均设置有与电池l型边匹配的l型发热体325。
64.本实施例中,封装部分30还包括角封机构340,角封机构340用于对电池的边角进行封装。
65.前述l型电池封装设备中,封装时裸电芯1和壳体在各封装设备中沿直线移送,无需转动裸电芯1和壳体,有利于保证封装精度。
66.本发明另一方面实施例公开了一种l型电池封装方法,该l型电池封装方法应用于前述的l型电池封装设备,包括如下步骤:将铝塑膜裁切成单片铝塑膜并将单片铝塑膜冲制成壳体,该壳体具有用于放置裸电芯1的凹槽234;将壳体放置到对折夹具内,并将裸电芯1放置到壳体内,利用对折夹具将壳体对折,然后利用对折夹具将裸电芯1和对折后的壳体一同输送到顶封机构310处进行电池的顶边封装工作,当顶封机构310的气缸夹边312将电池的侧边夹紧后,对折夹具打开并复位;顶封机构310的电池托板313升起并将电池托住,然后进行电池的顶边封装工作;依次对电池进行l型边封装、侧边封装和角封工作;对电池的侧边进行裁切,裁切完成后将电池输送到测试工位进行短路测试,测试完成后再利用ccd检测
极耳位置。
67.前述封装方法中,裸电芯1和壳体在各封装设备中沿直线移送,无需转动裸电芯1和壳体,有利于保证封装精度。
68.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。此外,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
