1.本发明涉及多相流参数测量领域,特别是涉及一种基于机器学习与物理约束相结合的气液两相流量测量方法及系统。
背景技术:
2.气液两相流广泛存在于石油、化工、地热、核能等领域。比如石油天然气行业中,随着天然气井的开采,地层水渗出以及碳烃化合物凝析导致集输管道中天然气含有液相,因此开发低成本的气液两相流量在线测量技术,对于掌握单井数据,科学管理气藏,预测气井出水量等显得尤其重要。气液两相流是一个非常复杂的非线性系统,而深度学习在处理复杂非线性关系映射上有良好的应用,因此考虑采用深度学习建立模型对气液两相流量进行预测。但深度学习的黑盒特性导致其预测鲁棒性及外推性能不能保证,从而阻碍了其在工程实际中的应用。如何将物理规律与深度学习结合起来,有效从小样本中学习数据之间的映射关系,且使预测结果符合一般物理规律,增强模型的泛化能力、外推能力成为了一个挑战性的问题。对此,本发明提出一种基于机器学习与物理约束相结合的气液两相流量测量方法及系统。
技术实现要素:
3.本发明的目的是提供一种基于机器学习与物理约束的气液两相流量测量方法及系统,基于气液两相流动基本方程建立物理约束方程,并将物理约束方程加入神经网络模型的损失函数,得到改进神经网络模型,基于改进神经网络模型预测气液两相流量能够大大提高准确性。
4.为实现上述目的,本发明提供了如下方案:
5.一种基于机器学习与物理约束的气液两相流量测量方法,包括:
6.基于v锥节流装置进行气液两相流动实验,得到气液两相流动实验数据;
7.根据气液两相流动基本方程建立物理约束方程;
8.在深度神经网络模型的损失函数中引入物理约束方程,得到改进的损失函数;基于所述改进的损失函数构建改进的深度神经网络模型;
9.利用所述气液两相流动实验数据训练所述改进的深度神经网络模型,得到气液两相流量测量模型,并利用所述气液两相流量测量模型进行气液两相流量的测量。
10.本发明还提供一种基于机器学习与物理约束的气液两相流量测量系统,包括:
11.实验数据获取模块,用于基于v锥节流装置进行气液两相流动实验,得到气液两相流动实验数据;
12.物理约束方程构建模块,用于根据气液两相流动基本方程建立物理约束方程;
13.深度神经网络模型构建模块,用于将深度神经网络模型的损失函数中引入物理约束方程,得到改进的损失函数;基于所述改进的损失函数构建改进的深度神经网络模型;
14.气液两相流量测量模块,用于利用所述气液两相流动实验数据训练所述改进的深
度神经网络模型,得到气液两相流量测量模型,并利用所述气液两相流量测量模型进行气液两相流量的测量。
15.根据本发明提供的具体实施例,本发明公开了以下技术效果:
16.本发明涉及一种基于机器学习与物理约束的气液两相流量测量方法及系统,根据气液两相流动基本方程提出简化的物理约束项,通过自定义神经网络的损失函数,将物理约束项加入损失函数中,在神经网络的寻优过程中,不仅最小化预测值和目标值之间的差距,同时使物理方程的残差项最小化。也即是神经网络模型的训练过程中,有目标值的引导,且有物理方程的约束,从而增强深度学习网络模型的可解释性以及外推能力,建立符合基本物理规律的气液两相流量测量模型,进而提高预测气液两相流量测量的准确性。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本发明实施例1提供的一种基于机器学习与物理约束的气液两相流量测量方法流程图;
19.图2为本发明实施例1提供的一种基于机器学习与物理约束的气液两相流量测量方法原理框图;
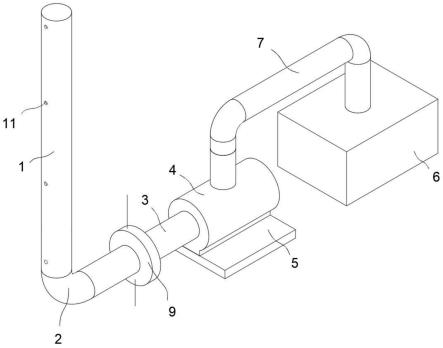
20.图3为本发明实施例1提供的v锥节流装置结构示意图;
21.图4为本发明实施例1提供的流体流过节流装置的示意图;
22.图5为本发明实施例1提供的融合物理约束的神经网络模型pgnn与纯数据驱动的神经网络模型dnn气相流量预测效果对比图;
23.图6为本发明实施例1提供的融合物理约束的神经网络模型pgnn与纯数据驱动的神经网络模型dnn液相流量预测效果对比图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明的目的是提供一种基于机器学习与物理约束的气液两相流量测量方法及系统,基于气液两相流动基本方程建立物理约束方程,并将物理约束方程加入神经网络模型的损失函数,得到改进神经网络模型,基于改进神经网络模型预测气液两相流量能够大大提高准确性。
26.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
27.实施例1
28.如图1所示,本实施例提供一种基于机器学习与物理约束的气液两相流量测量方
法,包括:
29.s1:基于v锥节流装置进行气液两相流动实验,得到气液两相流动实验数据。
30.基于v锥差压节流装置进行气液两相流实验,图3示出了v锥节流装置结构。使用单相流量计分别测量气液质量流量mg,m
l
,并将气液混合之后通入v锥节流装置测量试验段;采集v锥节流装置上游取压点和喉部取压点之间的差压δp
tp
,上游取压点和下游取压点之间的压损δpm,流经v锥节流装置的气液两相流压力p和温度t。采集v锥节流装置不同节流比下的多组工况数据,得到实验数据。
31.s2:根据气液两相流动基本方程建立物理约束方程;
32.如图4所示,单相流通过v锥节流装置示意图。对于单相流动,其一维流动方程可表示为:
[0033][0034]
其中,β是节流装置的节流比,定义为节流装置喉部横截面积与测量管道截面积的比值,a1为节流装置的上游位置处管道的横截面积,a2为节流装置喉部截面积,p1、p2分别为节流装置上游和喉部的压力,u1、u2分别为节流装置上游和喉部流体的速度。
[0035]
对于高含气(气相体积含率gvf≥95%)气液两相流动,假设气液分离流动,且考虑气液两相之间的剪切力fs,那么分别对气液两相列流动方程:
[0036][0037][0038]
其中,a
g2
,a
l2
分别表示节流装置喉部气相所占截面积和节流装置喉部液相所占截面积;
[0039]
气液流动连续性方程分别为:
[0040]
mg=ρ
gag1ug1
=ρ
gag2ug2
[0041]ml
=ρ
lal1ul1
=ρ
lal2ul2
[0042]
气液两相滑移比定义为:
[0043][0044]
由以上方程联立可得:
[0045][0046]
求解差压δp
tp
关于mg和m
l
的偏导可得:
[0047][0048]
[0049]
联立以上两个方程可得:
[0050][0051]
其中,
[0052]
由此定义物理约束方程的表达式为:
[0053][0054][0055]
其中,δp
tp
表示v锥节流装置上游取压点和喉部取压点之间的差压;ρg表示气相密度;ρ
l
表示液相密度;mg表示气相质量流量;m
l
表示液相质量流量;a2表示节流装置喉部的截面积;β表示节流装置的节流比。
[0056]
s3:在深度神经网络模型的损失函数中引入物理约束方程,得到改进的损失函数;基于所述改进的损失函数构建改进的深度神经网络模型;
[0057]
定义深度神经网络结构含有m个隐层,每层m个神经元,1个输入层,1个输出层。其中输入层含有4个神经元,分别是差压δp
tp
,压损δpm,气液相密度比dr,v锥节流比β。输出层含有2个神经元,mg,m
l
分别为气相质量流量和液相质量流量。其中,气液相密度比为气相密度与液相密度的比值,气相密度通过压力p和温度t进行计算,液相密度为定值。
[0058]
定义改进的损失函数的表达式为:
[0059]
loss=θ1mse_mg θ2mse_m
l
θ3mse_f
[0060]
其中,θ1,θ2,θ3表示权值系数;mse_mg表示气相流量预测值与气相流量目标值之间的均方误差;mse_m
l
表示液相流量预测值与液相流量目标值之间的均方误差;mse_f表示物理约束方程的残差函数。
[0061][0062][0063][0064]
mg分别为气相流量预测值与气相流量目标值;m
l
分别为液相流量预测值与液相流量目标值;n为样本数量。表示物理约束方程的预测值。
[0065]
s4:利用所述气液两相流动实验数据训练所述改进的深度神经网络模型,得到气液两相流量测量模型,并利用所述气液两相流量测量模型进行气液两相流量的测量。
[0066]
步骤s4具体包括:
[0067]
s41:将所述气液两相流动实验数据按第一预设比例划分为训练数据集和第一测试数据集。为了测试模型的泛化能力,所述第一测试数据集中包括的工况范围大于所述训练数据集包括的工况范围。
[0068]
s42:将所述训练数据集中的第二预设比例的数据作为第二测试数据集。
[0069]
具体的,在训练过程中可以将训练数据集的20%数据作为第二测试数据集,以防止训练过程中网络过拟合。
[0070]
s43:利用所述训练数据集对所述改进的深度神经网络模型进行训练,并在训练的过程中,利用所述第二测试数据集对训练过程中的深度神经网络模型进行测试,得到训练后的深度神经网络模型;
[0071]
s44:利用所述第二测试数据集验证所述训练后的深度神经网络模型的预测性能,并基于验证结果调整所述训练后的深度神经网络模型的模型参数至最优参数,得到气液两相流量测量模型。
[0072]
模型训练好之后采用第一测试数据集,验证模型的泛化及外推能力。
[0073]
本实施例中,得到气液两相流量测量模型之后还包括:
[0074]
利用均方根误差rmse和平均绝对误差mae评价所述气液两相流量测量模型的测量性能。
[0075][0076][0077]
其中表示预测值,y
targ
表示目标值,n为样本数量,abs()表示取绝对值。
[0078]
为了便于本领域技术人员理解本发明的方案,下面结合示例介绍本实施例中的测量方法:
[0079]
(1)本示例采用五种不同节流比(0.45,0.48,0.55,0.65,0.75)的v锥节流装置进行实验,共采集774组工况数据,将其中v锥节流比为0.48的数据集(327组)作为测试神经网络模型效果的第一测试数据集,其余数据(447组)作为建立神经网络模型的训练数据集。
[0080]
为了测试模型的泛化能力,第一测试数据集的工况范围大于训练数据集的工况范围,其中训练数据集的气相质量流量范围是0-0.14kg
·
s-1
,液相质量流量范围是0-0.6kg
·
s-1
,洛玛参数x
lm
为0-0.3。第一测试数据集的洛玛参数x
lm
为0-0.7,气相质量流量范围是0-0.16kg
·
s-1
,液相质量流量范围是0-1.0kg
·
s-1
。
[0081][0082]
(2)本示例中构造的深度神经网络模型结构含有7个隐层,每层20个神经元,1个输入层,1个输出层。其中输入层含有4个神经元,分别是差压δp
tp
,压损δpm,气液相密度比dr,v锥节流比β。输出层含有2个神经元,为气液质量流量mg,m
l
。
[0083]
[0084][0085]
其中,p0,t0和ρ0是标况下的压力,温度,密度。p0为101.325千帕,t0为0℃。
[0086]
(3)本示例中神经网络激活函数采用双曲正切函数tanh。损失函数定义为:
[0087]
loss=5*mse_mg 5*mse_m
l
0.01*mse_f
[0088]
(4)为了评估本文所提方法的预测性能,训练了融合物理知识的深度神经网络(physics-guided neural network,pgnn)与纯数据驱动的深度神经网络(deep neural network,dnn)进行对比。图5和图6分别为pgnn和dnn在第一测试数据集上对气相和液相的预测效果对比,可以看出,pgnn在更宽范围内的测试数据集上预测效果较好,说明本发明提出的方法有效提高了深度神经网络模型的外推性能,使预测结果能够符合一定的物理规律。除此之外,计算了两种模型预测结果的rmse和mae反映其预测性能。对比结果见表1,结果进一步表明与物理约束相结合的神经网络有更好的泛化性能。
[0089]
表1 pgnn和dnn在第一测试数据集上的预测指标对比
[0090][0091]
本实施例中,针对气液两相流的流动方程进行合理假设简化,并基于神经网络反向传播自动求导的特性提出适用于深度学习的物理约束项,通过自定义神经网络的损失函数表达式,将物理约束项加入损失函数中,使神经网络的训练过程中,不仅有目标值的引导,同时有物理项的约束。对比纯数据驱动模型可发现,与物理相结合的深度学习提高了模型的外推能力,又使神经网络模型具有一定的可解释性。
[0092]
实施例2
[0093]
本实施例提供一种基于机器学习与物理约束的气液两相流量测量系统,包括:
[0094]
实验数据获取模块t1,用于基于v锥节流装置进行气液两相流动实验,得到气液两相流动实验数据;
[0095]
物理约束方程构建模块t2,用于根据气液两相流动基本方程建立物理约束方程;
[0096]
其中,所述物理约束方程构建模块t2中的所述物理约束方程的表达式为:
[0097][0098]
其中,δp
tp
表示v锥节流装置上游取压点和喉部取压点之间的差压;ρg表示气相密度;ρ
l
表示液相密度;mg表示气相质量流量;m
l
表示液相质量流量。
[0099]
深度神经网络模型构建模块t3,用于在深度神经网络模型的损失函数中引入物理约束方程,得到改进的损失函数;基于所述改进的损失函数构建改进的深度神经网络模型;
[0100]
其中,所述深度神经网络模型构建模块t3中的所述改进的损失函数的表达式为:
[0101]
loss=θ1mse_mg θ2mse_m
l
θ3mse_f
[0102]
其中,θ1,θ2,θ3表示权值系数;mse_mg表示气相流量预测值与气相流量目标值之间的均方误差;mse_m
l
表示液相流量预测值与液相流量目标值之间的均方误差;mse_f表示物理约束方程的残差函数。
[0103]
气液两相流量测量模块t4,用于利用所述气液两相流动实验数据训练所述改进的深度神经网络模型,得到气液两相流量测量模型,并利用所述气液两相流量测量模型进行气液两相流量的测量。
[0104]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0105]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。