技术特征:
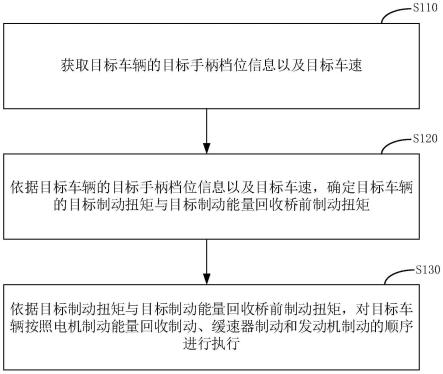
1.一种混合动力系统多制动协同控制方法,其特征在于,包括:获取目标车辆的目标手柄档位信息以及目标车速;依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩;依据所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩,对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行。2.根据权利要求1所述的方法,其特征在于,在依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩之前,所述方法还包括:获取目标车辆的电池状态信息、电机状态信息、发动机转速信息、缓速器信息以及变速箱传动信息;依据所述电池状态信息和电机状态信息确定电机制动扭矩信息表;依据所述发动机转速信息和所述变速箱传动信息确定发动机制动扭矩信息表;依据所述电机制动扭矩信息表以及所述变速箱传动信息确定所述制动能量回收桥前制动扭矩信息表;其中,制动能量回收桥前制动扭矩信息表中包括基于车辆速度信息确定的手柄档位信息和制动能量回收桥前制动扭矩之间的映射关系;依据所述制动能量回收桥前制动扭矩信息表、所述发动机制动扭矩信息表和所述缓速器信息确定所述目标制动扭矩信息表;其中,目标制动扭矩信息表中包括基于车辆速度信息确定的手柄档位信息和目标制动扭矩之间的映射关系。3.根据权利要求2所述的方法,其特征在于,所述依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩,包括:基于所述目标制动扭矩信息表和所述制动能量回收桥前制动扭矩信息表中的映射关系,依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,分别确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩。4.根据权利要求1所述的方法,其特征在于,在依据所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩,对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行之前,所述方法还包括:确定所述目标车辆所配置的缓速器、发动机制动以及电机制动能量回收是否处于正常开启状态;若否,则上报故障信息。5.根据权利要求4所述的方法,其特征在于,依据所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩,对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行,包括:确定所述目标车辆所配置的缓速器、发动机制动以及电机制动能量回收处于正常开启状态之后,判断所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩是否满足第一预设条件;其中,第一预设条件为所述目标制动扭矩小于或等于所述目标制动能量回收桥前制动扭矩;若满足,则对目标车辆按照电机制动能量回收制动进行执行;
若不满足,则对目标车辆按照电机制动能量回收制动为目标车辆提供产生的最大制动扭矩后,按照缓速器制动进行执行。6.根据权利要求5所述的方法,其特征在于,按照缓速器制动进行执行,包括:判断所述目标车辆是否匹配缓速器;若目标车辆未匹配缓速器,则确定所述发动机转速是否满足第二预设条件;其中,第二预设条件为所述发动机转速大于标定阈值;若目标车辆匹配缓速器,则调用所述缓速器以补充剩余制动扭矩,其中,所述剩余制动扭矩根据所述目标制动扭矩和所述最大制动扭矩进行确定。7.根据权利要求6所述的方法,其特征在于,所述调用所述缓速器以补充剩余制动扭矩之后,所述方法包括:判断调用所述缓速器后是否能使所述目标车辆达到目标制动扭矩;若否,则确定所述发动机转速是否满足第二预设条件。8.根据权利要求6或7所述的方法,其特征在于,确定所述发动机转速是否满足第二预设条件,包括:若满足,则将离合器闭合,调用发动机进行发动机制动以使目标车辆达到目标制动扭矩;若不满足,则将离合器闭合并降低变速箱档位后,调用发动机进行发动机制动以使目标车辆达到目标制动扭矩。9.根据权利要求8所述的方法,其特征在于,在所述调用发动机进行发动机制动以使目标车辆达到目标制动扭矩之后,所述方法还包括:判断所述目标车辆能否达到目标制动扭矩;若否,则发出警示信息;其中,所述警示信息包括制动扭矩受限信息和故障信息;制动扭矩受限信息包括电机制动扭矩受限信息、缓速器制动受限信息以及发动机制动受限信息。10.根据权利要求1所述的方法,其特征在于,在对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行之前,所述方法还包括:获取制动踏板信息和油门踏板信息;若所述目标车辆未响应制动踏板信息和油门踏板信息,则对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行。11.一种混合动力系统多制动协同控制装置,其特征在于,包括:信息获取模块,获取目标车辆的目标手柄档位信息以及目标车速;扭矩确定模块,依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩;制动模块,依据所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩,对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行。12.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所
述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-10中任一项所述的混合动力系统多制动协同控制方法。13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-10中任一项所述的混合动力系统多制动协同控制方法。
技术总结
本发明公开了一种混合动力系统多制动协同控制方法、装置、设备和介质。该方法包括:获取目标车辆的目标手柄档位信息以及目标车速;依据所述目标车辆的所述目标手柄档位信息以及所述目标车速,确定目标车辆的目标制动扭矩与目标制动能量回收桥前制动扭矩;依据所述目标制动扭矩与所述目标制动能量回收桥前制动扭矩,对目标车辆按照电机制动能量回收制动、缓速器制动和发动机制动的顺序进行执行。本申请技术方案采用不同目标手柄档位信息,协调控制目标车辆执行电机制动能量回收制动、缓速器制动和发动机制动,以实现制动能量回收最大化,保证各个目标手柄档位信息的制动力矩一致,减少能量损失和制动部件机械磨损。减少能量损失和制动部件机械磨损。减少能量损失和制动部件机械磨损。
技术研发人员:吴延寿 袁岳超 姜世腾 赵云 刘锦涛 杨天昊 陈衍伟
受保护的技术使用者:一汽解放汽车有限公司
技术研发日:2022.09.19
技术公布日:2022/11/18
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。