1.本发明涉及船舶建造过程中对轴系分段进行定位,准确快速判断出轴系分段镗孔的偏差方向和趋势,一次性得出轴系分段镗孔相应的精度数据。以提高轴系分段定位精度,方便轴系分段定位施工,减少后续镗孔修正工作,降低施工成本,减少施工周期。
背景技术:
2.轴系分段上方带有艉管,艉管呈柱状,在艉管的中心轴处有一个极细的通孔(基本可忽略不计),船厂建造船舶时,轴系分段定位后,艉管需要被镗,镗后形成镗孔。轴系分段带有的艉管被镗后形成的镗孔要满足较高的公差要求,以保证艉轴可以穿过镗孔,并且在后续的组建过程中保证轴舵系照光数据的匹配达到要求,轴舵系照光数据的匹配要求极其严格,轴系与舵系交叉数据需要控制在2mm的范围内,并且随着规范的深入发展,船东对镗孔数据偏差的要求也更加的严格,而且今后施工趋势是要提前进行镗孔施工。如果轴系分段定位不准确,导致后续艉管无法镗到所需的尺寸,则需要将焊接好的轴系分段与基准分段切割分离,对轴系分段重新定位、焊接,使艉管可被镗至要求尺寸,以保证艉轴可穿过艉管。定位不准确可能会造成多次返工,浪费大量人力物力。
3.因此需要采取必要的措施,在轴系分段定位过程中提高数据精度,从而保证船舶动力装置定位后,艉轴能顺利的穿过轴系分段的艉管轴孔(镗孔)。现在采用的测量装置测量效果不好,测量点精度达不到要求;吊线坠方法落后,对天气的要求比较苛刻,且精度较差,艉管轴孔(镗孔)边缘焊接的简易横向角钢装置,在后续切割横向角钢装置时,容易在破坏母材,增加后期的修改量,且在施工过程需要进行多次反复的搬移仪器,反复查看数据变化,造成不能一次性得出全部的精度数据,提高施工成本,延长建造周期。
技术实现要素:
4.为解决上述问题,本发明提供一种轴系分段定位精度控制方法,旨在达到轴系分段与基准分段对接后,轴系分段带有的艉管可被镗至最大值,避免后续再切开重新对接的目的,其所采用的技术方案是:
5.一种轴系分段定位精度控制方法,基准分段位于坞室内,在坞墙上施画艉基准点,在基准分段上施画艏基准点,艉基准点和艏基准点均位于船体理论纵向中心线上,并且艏基准点的高度=主机坑上板面的高度 主机坑上板面距离艉轴中心点的理论高度;艉基准点的高度=基线高度平均值 船体外底板厚度 理论轴线中心的距船体外底板上板面的高度数值,利用全站仪对艏基准点和艉基准点进行建站,形成三维坐标系,同时得到艏基准点与艉基准点连线数据。
6.将轴系分段与基准分段对接,轴系分段上方带有艉管,在艉管的艏端和艉管的艉端分别设置多个反射光靶,利用全站仪测量得到艉管艏端、艉端中心点的三维坐标,进而得到艉管艏端与艉端的连线数据。
7.计算艏基准点和艉基准点连线数据,与艉管艏端和艉端连线数据的偏差值,判断
偏差值是否在艉管可被镗最大值范围内,如在可被镗最大值范围内,将轴系分段与基准分段进行封固,封固后焊接固定。
8.偏差值如超出可被镗最大值范围,需对轴系分段重新定位,重复上述步骤,直至偏差值在可被镗最大值范围内。
9.上述一种轴系分段定位精度控制方法,更进一步地,多个反射光靶沿艉管艏端周向等间距设置,多个反射光靶沿艉管艉端周向等间距设置。
10.上述一种轴系分段定位精度控制方法,更进一步地,轴系分段被吊运至坞室内,与基准分段对接。
11.上述一种轴系分段定位精度控制方法,更进一步地,轴系分段与基准分段进行封固后,对轴系分段与基准分段进行复检,复检合格后,将轴系分段与基准分段焊接固定。
12.上述一种轴系分段定位精度控制方法,更进一步地,基准分段远离艉管艏端处设置有支架,在支架上施画艏基准点。
13.上述一种轴系分段定位精度控制方法,更进一步地,反射光靶固定在艉管艏端或艉管艉端的内管壁上。
14.本发明所采用的这种方法,可以快速判断出轴系分段在与基准分段固定时轴系分段镗孔的偏差方向和趋势。提高了轴系分段现场的定位精度。减少精度偏差产生的后续修正等工作量,极大的降低了施工成本。
附图说明
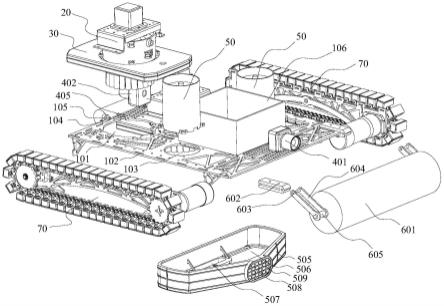
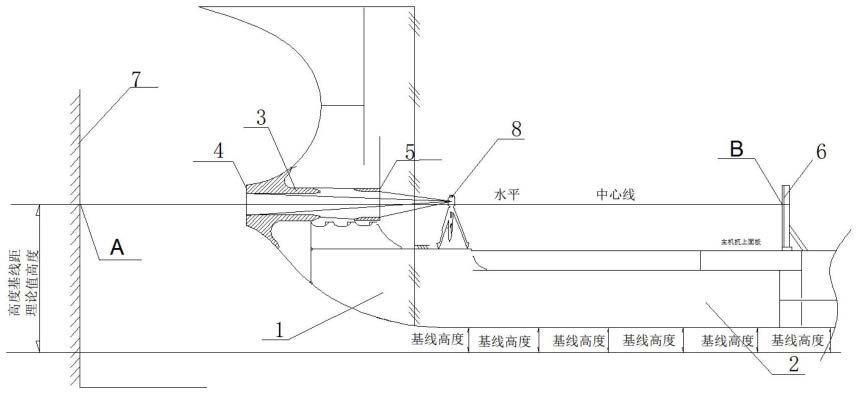
15.图1是本发明的结构示意图;
16.图2是带有反射光靶的艉管艏端或艉管艉端结构示意图;
17.其中:1-轴系分段、2-基准分段、3-艉管、4-艉管艏端、5-艉管艉端、6-支架、7-坞墙、8-全站仪、9-反射光靶、a-艉基准点、b-艏基准点。
具体实施方式
18.实施例1
19.结合附图对本发明作进一步说明。
20.如图1所示,一种轴系分段定位精度控制方法,基准分段位于坞室内,基准分段上设置有主机坑(未在图中标示),将轴系分段定位施工前,先要设置艏基准点和艉基准点,艏基准点和艉基准点均位于船体中心线上,仅确定艏基准点和艉基准点位于船体中心线上还不行,需要进一步确定艏基准点和艉基准点所处于的高度位置,以保证方便后续对艉管进行定位。艏基准点高度值=主机坑上板面的高度 主机坑上板面距离艉轴中心点的理论高度,艉基准点高度值=基线高度平均值 船体外底板厚度 理论轴线中心的距船体外底板上板面的高度数值,同时得到艏基准点与艉基准点的连线数据。理论轴线中心的距船体外底板上板面的高度数值,是图纸上标注的一个尺寸,安装轴系的图纸不会标注距离基线多高,只标注距离船体外底板上板面多高。
21.利用水平仪对船体外底基线进行水平数据的测量,将所测全部数据进行平均值计算,根据计算的基线平均值数据,利用激光全站仪将艉基准点施画在坞墙上。
22.利用全站仪测量已设置好的艏基准点和艉基准点的水平度,查看两个点的水平高
度数据是否一致,当两个点的水平高度数据测量数据出现偏差时,要以艏基准点为主要依据进行艉基准点高度方向的调整,同时考虑外底基线平均值的实际偏差数据,在调整过程中,艉基准点的高度数据调整范围不超过2-4mm。艉基准点需与艏基准点的高度应该是一致的,如不一致,说明可能艏基准点或艉基准点的高度测量错误,则需要对艏基准点和艉基准点进行重新测量。在测量艉基准点的过程中,基线平均值数据只需测量轴系分段区域的船体外底基准水平数据。因此,采用两个不同的计算公式来计算得到艏基准点和艉基准点,可以起到对二者高度数据进行校验的作用。
23.艏基准点与艉基准点施画好后,将轴系分段吊运至坞室内,与基准分段定位对接,全站仪架设在基准分段主机坑艉部的平台处(基准分段靠近轴系分段的一端为艉部),利用全站仪将艏基准点和艉基准点建立三维坐标,并在轴系分段带有的艉管艏端、艉管艉端等间距设置多个反射标靶,如图2所示,多个反射标靶是三个以上的反射标靶,只有采用三个以上的反射标靶才能测量得到艉管艏端、艉管艉端中心点(即端部圆心)处三维坐标数据,并得到艉管艏端中心点与艉管艉端中心点的连线数据。将艉管艏端中心点和艉管艉端中心点连接数据,与艏基准点和艉基准点连线数据进行偏差比对,得到偏差值,判断偏差值是否在艉管可被镗的最大数值范围内(y值和z值),即此偏差值是否对艉管被镗到最大值产生影响,如产生影响,根据数据偏差值对轴系分段状态进行修正,直到数据满足艉管可被镗到最大值的要求为止,最终确定轴系分段的定位数据,然后进行该轴系分段的定位封固施工。
24.轴系分段合拢定位封固后进行轴系分段艏艉镗孔数据与艏基准点、艉基准点连线数据复检时,即判断艏基准点、艉基准点连线,和艉管艏端、艉管艉端连接是否重合。如前所述对艏基准点和艉基准点连线进行测量、对艉管艏端和艉管艉端连线进行测量,并得到二者之间的偏差值,如果两者偏差值符合要求,则轴系分段定位结束,将轴系分段与基准分段焊接。如果两者数据偏差超过要求,则需要将轴系分段与基准分段的封固打开,重新进行测量、调整,直至封固后两者数据偏差满足要求。
25.本发明所采用的这种方法,可以快速判断出轴系分段在与基准分段固定时轴系分段镗孔的偏差方向和趋势。提高了轴系分段现场的定位精度。减少精度偏差产生的后续修正等工作量,极大的降低了施工成本。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。