1.本发明涉及光信号探测领域,特别是涉及一种增益自适应的激光雷达接收电路及激光雷达。
背景技术:
2.激光雷达系统使用激光信号探测环境中的静止目标或者移动目标,根据目标对激光信号的反射,激光雷达获取回波信号,并根据该回波信号转换成为目标的三维空间信息,进行目标物的测量和识别。
3.由于环境中目标物类型丰富,回波信号的状况波动范围大,对于激光雷达,更广阔的接收信号范围,能够适应复杂多变的外在环境,故而,本领域的技术人员期望增大激光雷达系统的接收信号的动态范围。
4.特别是,期望激光雷达系统既增大其弱光检测能力,同时又维持对近程目标的准确测量。
5.通常,激光雷达采集的远距离目标的回波信号的强度低,近距离目标的回波信号的强度高。接收电路容易出现对远距离目标的微弱信号处理困难,对近距离目标的强烈信号过饱和的问题。
6.故而,本领域的技术人员期待激光雷达能够对近距离目标以及远距离目标的回波信号均可进行接收探测,并输出合理的探测信号。
技术实现要素:
7.本发明公开了一种增益自适应的激光雷达接收电路及激光雷达,基于对远、近距离目标的信号进行动态识别以及自适应的平衡放大的信号,进行三维空间信息的运算。
8.本发明公开了一种增益自适应的激光雷达接收电路,包括光电转换电路,还包括:信号放大电路,该信号放大电路具有n个通道,分别同步输出放大信号,n大于等于2,不同通道具有不同的放大倍数;n个信号采集电路,每个信号采集电路与该信号放大电路的一个通道连接,对该放大信号进行采集;时间转换电路,用于测量该放大信号对应的时间数据;控制运算单元,该控制运算单元根据该时间数据,选择目标放大倍数的信号,进行后续运算。
9.该控制运算单元接收该n个信号采集电路的输出以及该时间转换电路的输出,该控制运算单元根据该时间数据判断目标物为近距离,选择低放大倍数,根据该时间数据判断目标物为远距离,选择高放大倍数。
10.该信号放大电路具有第一通道和第二通道,该第一通道具有第一放大倍数,该第二通道具有第二放大倍数,该第一放大倍数大于该第二放大倍数,该第一通道与第一信号采集电路连接,该第二通道与第二信号采集电路连接;
在该时间数据小于等于一第一阈值时,该控制运算单元选择该第二信号采集电路采集的信号,在该时间数据大于该第一阈值时,该控制运算单元选择该第一信号采集电路采集的信号。
11.该控制运算单元根据该时间数据以及该信号采集电路所采集的信号的强度,选择该目标放大倍数的信号。
12.该信号放大电路具有第一通道、第二通道和第三通道,该第一通道具有第一放大倍数,该第二通道具有第二放大倍数,该第三通道具有第三放大倍数,该第一放大倍数大于该第二放大倍数,该第二放大倍数大于该第三放大倍数,该第一通道与第一信号采集电路连接,该第二通道与第二信号采集电路连接,该第三通道与第三信号采集电路连接;在该时间数据小于等于一第一阈值时,该控制运算单元判断该第三信号采集电路采集的信号是否小于一第二强度阈值,如果否,该控制运算单元选择该第三信号采集电路采集的信号,如果是,该控制运算单元选择该第二信号采集电路采集的信号;在该时间数据大于该第一阈值时,该控制运算单元判断该第一信号采集电路采集的信号是否大于一第一强度阈值,如果否,该控制运算单元选择该第一信号采集电路采集的信号,如果是,该控制运算单元选择该第二信号采集电路采集的信号。
13.所述的接收电路还包括一存储模块,该n个信号采集电路均与该存储模块连接,该控制运算单元从该存储模块中选取该目标放大倍数的信号。
14.该信号放大电路为具有一路输入,n路输出的跨阻放大器。
15.该信号采集电路为adc,采用单片多通道结构。
16.在该n个信号采集电路之间设置同步控制电路。
17.本发明还公开了一种激光雷达,包括:所述的接收电路。
18.本发明基于目标的距离,选择已进行适当倍数的放大的信号进行后续运算,以得到更加精确的目标三维空间信息。本发明的增益自适应的激光雷达接收电路可以对远、近距离目标的信号进行动态识别并自适应的进行平衡放大,选择适当增益的信号。对于远、近目标的极端情况,也可进行平滑处理,避免信号饱和或过于微弱,无法作为有效数据进行后续运算。
附图说明
19.图1所示为本发明的增益自适应的激光雷达接收电路的结构示意图;图2所示为本发明的增益自适应的激光雷达接收电路的结构示意图;图3所示为本发明的另一实施例的增益自适应的激光雷达接收电路的结构示意图;图4所示为本发明的另一实施例的增益自适应的激光雷达接收电路的结构示意图。
具体实施方式
20.以下结合具体实施例描述本发明的技术方案的实现过程,不作为对本发明的限制。
21.本发明公开了一种增益自适应的激光雷达接收电路及激光雷达,对远、近距离目
标的信号进行动态识别并自适应的进行平衡放大。
22.该增益自适应的激光雷达接收电路,包括光电转换电路,还包括:信号放大电路,该信号放大电路具有n个通道,分别同步输出放大信号,n大于等于2,不同通道具有不同的放大倍数;n个信号采集电路,每个信号采集电路与该信号放大电路的一个通道连接,对该放大信号进行采集;时间转换电路,该时间转换电路与该信号放大电路连接,以测量该放大信号对应的时间数据;控制运算单元,该控制运算单元根据该时间数据,选择目标放大倍数的信号,进行后续运算。
23.光电转换电路每收到一个激光信号,对应产生一个时间数据,n个放大信号。
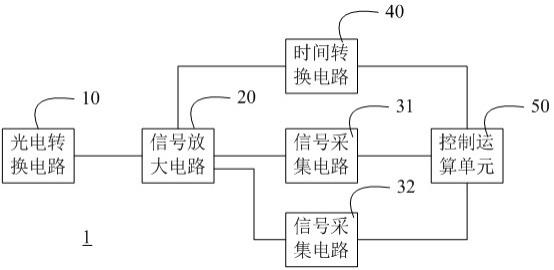
24.如图1所示为本发明的增益自适应的激光雷达接收电路的结构示意图。
25.接收电路1包括光电转换电路10、信号放大电路20、信号采集电路31、32、时间转换电路40以及控制运算单元50。
26.光电转换电路10用于接收激光信号,并将光信号转换为电信号。
27.信号放大电路20与该光电转换电路10连接,该信号放大电路20通常为跨阻放大器,用于对该电信号进行放大。该信号放大电路20具有一路输入以及多路输出,以形成多个通道。图1中以两个通道为例,不以此为限。
28.该信号放大电路20的第一路输出形成第一通道,该第一通道具有第一放大倍数,即,对该电信号进行第一放大倍数的放大,该信号放大电路20的第二路输出形成第二通道,该第二通道具有第二放大倍数,对该电信号进行第二放大倍数的放大。不同通道对应的放大倍数不同。该信号放大电路20的每路输出均与一个信号采集电路连接。该第一通道与信号采集电路31连接,该第二通道与信号采集电路32连接。
29.该信号采集电路可例如为adc,用于同步对每个通道的放大信号进行采集,生成数字信号。adc采用单片多通道结构。或者,adc采用多片单通道,但是,在多个通道之间设置同步控制电路。
30.时间转换电路40与该信号放大电路20连接,以测量该放大信号对应的时间数据。该时间转换电路40可例如为tdc。
31.控制运算单元50分别与该时间转换电路40、信号采集电路31、信号采集电路32连接,该控制运算单元50接收该时间数据,根据该时间数据从不同通道采集的信号中进行选择,并根据该所选择信号以及该时间数据,进行三维空间信息的运算。
32.由于近距离的目标物,其对应反射的激光信号的飞行时间短,故而时间数据较小,且信号衰减较小,其信号强度通常较高。而远距离的目标物,其对应反射的激光信号的飞行时间长,故而时间数据较大,且信号衰减较大,其信号强度通常较低。
33.该控制运算单元50根据该时间数据判断目标物的远近,如果判断为近距离,在两个通道之间选择低放大倍数的通道。即,此时的激光信号已经具备了较高的强度,则选择较低的放大倍数以实现放大后的信号既可以被检测到又不至于饱和,进行适当的信号放大调整。如果判断为远距离,在两个通道之间选择高放大倍数的通道。即,此时的激光信号经历了长时间的飞行以及衰减具有较低的强度,则选择较高的放大倍数以使得放大后的信号可
以被清晰的采集到,便于后续的计算。
34.具体而言,该控制运算单元50基于该时间数据进行放大倍数的选择。该第一放大倍数大于该第二放大倍数,在该时间数据小于等于一第一阈值时,该控制运算单元选择该第二信号采集电路采集的信号,在该时间数据大于该第一阈值时,该控制运算单元选择该第一信号采集电路采集的信号。从而使得对于放大倍数的选择与激光信号的强度情况进行关联,实现动态平衡放大,过大与过小的信号均可进行合理的调整。该第一阈值用于划分目标物的远近。
35.如图2所示,该激光雷达接收电路还包括一存储模块60,该信号采集电路31、32均与该存储模块60连接,也就是说,两个通道的数据,特别是数字信号对应的数据均存储在该存储模块60中。所有数据先存储,以备该控制运算单元50从该存储模块60中选取特定通道对应的数据,即,目标放大倍数的信号。如此,所有放大倍数的信号均被留存,便于后续数据选择的完整性与便利性。
36.在一实施例中,该时间转换电路40也可与该存储模块60连接,以备该控制运算单元50从该存储模块60中选取时间数据作为判断依据,以选择特定通道对应的数据。
37.如图3所示为本发明的另一实施例的结构示意图。在图1的基础上,该信号放大电路20进一步具有第三路输出形成第三通道,该第三通道具有第三放大倍数。该第二放大倍数大于该第三放大倍数,该信号放大电路20的第三通道与信号采集电路33连接。
38.在通道更多,放大倍数更加细分时,该控制运算单元50可以更加精细的从不同通道中选择适当的放大倍数,使得对信号的放大处理更加平滑,避免剧烈震荡,更加符合实际情况。
39.此时,可将时间数据以及信号强度共同作为通道选择的依据,提升选择策略的全面性。预设有第一强度阈值与第二强度阈值。
40.该第一强度阈值用于划分对于远距离的目标,是否信号强度过高,如果虽然是远距离的信号,但信号强度很高,说明来自高反射物的反射,此时可以采用中等放大倍数的通道所采集的数据,进行后续运算。避免直接采用最高放大倍数,造成饱和。
41.该第二强度阈值用于划分对于近距离的目标,是否信号强度过低,如果虽然是近距离的信号,但信号强度很低,说明来自低反射物的反射,例如黑布,此时可以采用中等放大倍数的通道所采集的数据,进行后续运算。避免直接采用最低放大倍数,造成信号过于微弱,无法被识别,处理困难。该第一强度阈值与该第二强度阈值之间各自独立,没有必然的关联关系。
42.具体来说,在该时间数据小于等于一第一阈值时,该控制运算单元判断该第三信号采集电路采集的信号是否小于一第二强度阈值,如果否,该控制运算单元选择该第三信号采集电路采集的信号,如果是,该控制运算单元选择该第二信号采集电路采集的信号;在该时间数据大于该第一阈值时,该控制运算单元判断该第一信号采集电路采集的信号是否大于一第一强度阈值,如果否,该控制运算单元选择该第一信号采集电路采集的信号,如果是,该控制运算单元选择该第二信号采集电路采集的信号。
43.如图4所示,为在图3基础上进一步设置该存储模块60。该信号采集电路31、32、33均与该存储模块60连接,也就是说,三个通道的数据,特别是数字信号对应的数据均存储在该存储模块60中。时间转换电路40也连接至该存储模块60,时间数据存储至该存储模块60。
该控制运算单元50从该存储模块60中选取特定通道对应的数据,即,目标放大倍数的信号。如此,所有放大倍数的信号均被预先全部留存,便于后续数据选择的完整性与便利性。经过该控制运算单元50选择后的数据,仍可进行存储,不丢弃,以便于后续对数据的再次修正。
44.本发明基于目标的距离,选择已进行适当倍数的放大的信号进行后续运算,以得到更加精确的目标三维空间信息。本发明的增益自适应的激光雷达接收电路可以对远、近距离目标的信号进行动态识别并自适应的进行平衡放大,选择适当增益的信号。对于远、近目标的极端情况,也可进行平滑处理,避免信号饱和或过于微弱,无法作为有效数据进行后续运算。
45.上述实施例仅用于描述本发明的技术方案,不视为对本发明的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。