一种基于计算机视觉技术的超高层建筑结构动态特性监测方法
1.技术领域
2.本发明涉及一种基于计算机视觉技术的超高层建筑结构动态特性监测方法,属于超高层建筑监测与人工智能交互领域。
背景技术:
3.由于超高层建筑的高度以及复杂的结构型式,超高层建筑在实际的施工过程中,在受到风力、季节温差、施工等外界环境因素的影响下,建筑结构会发生无规则偏移摆动,这种建筑无规则的摆动状态会直接影响施工过程中施工控制网向上传递的精确性,以及建筑摆动的位移幅值若超出规范要求,会严重影响建筑的结构安全。
4.现有的超高层建筑偏移的监测方法主要包括全站仪监测、lvdt位移传感器监测、基于视觉与传感器融合监测等。全站仪监测是对建筑上选取的固定点进行定时监测,获得不同时刻建筑的各向偏移情况,这种人工的监测方法费时费力误差大,且自动化程度低,只能获取分散的个别时刻的位移数据,无法反映超高层建筑结构实时的动态特性。而lvdt位移传感器监测主要是参考不动基准点,测量活动点相对于基准点的位移变化,该监测方法主要适用于小型建筑结构的位移测量。基于视觉与传感器融合监测方法主要针对于建筑后期运营阶段的晃动监测,在建筑施工过程中监测存在装置复杂、移动不方便及稳定性不高等问题。
技术实现要素:
5.为了克服现有技术自动化程度低、装置复杂移动不便及稳定性不高等不足,本发明的目的在于提供一种基于计算机视觉技术的超高层建筑结构动态特性监测方法,通过现场监测装置系统获取激光的实时动态视频图像,实现实时连续监测、且准确度高。
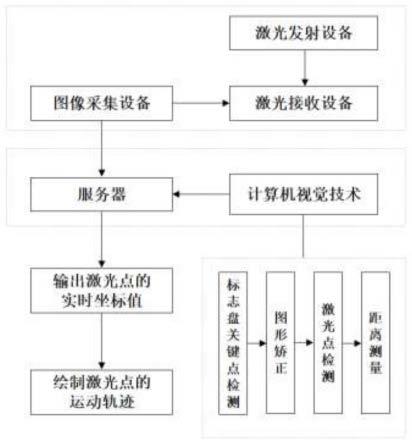
6.为了实现上述目的,本发明采用了以下的技术方案:一种基于计算机视觉技术的超高层建筑结构动态特性监测方法,通过结合计算机视觉技术和现场监测装置系统自动获取激光的实时动态视频图像,对视频图像进行关键点检测、图像矫正、激光点检测及距离测量,自动识别激光点的实时坐标变化,输出激光点的运动轨迹。该发明大大的提高了监测的效率和可靠性。同时本技术达到30fps的处理速度,可以达到实时监测的要求。
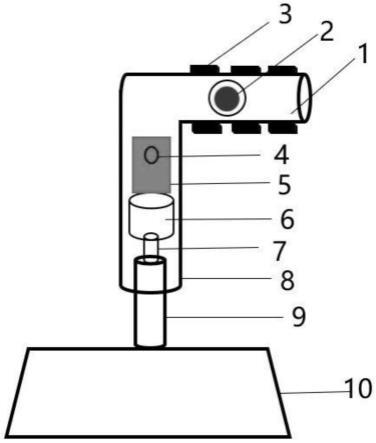
7.具体来说,一种基于计算机视觉技术的超高层建筑结构动态特性监测方法,包括以下步骤:(1)采用现场监测装置系统,利用安装在建筑塔体拟监测起始楼层上的激光发射设备,以塔体的控制点预留孔作为激光向上的传递路径,通过图像采集设备获取激光传递至拟监测终止楼层激光接收设备上的视频图像。
8.所述的监测装置系统包括激光发射设备、激光接收设备、图像采集设备。
9.(2)将步骤(1)的监测装置系统获取的激光实时视频图像无线传输至服务器。
10.所述的视频图像包括激光和带有刻度线标志盘;(3)采用计算机视觉技术系统对视频图像进行预处理、标志盘直线检测以及标志盘关键点检测。
11.所述的图像预处理包括灰度化和自适应阈值二值化;所述的直线检测包括标志盘的横向直线和纵向直线;所述的关键点检测包括四个角点计算和中心点计算;(4)基于透视变换方法,利用步骤(3)检测的标志盘四个角点,对视频图像进行矫正。
12.(5)利用步骤(4)矫正后的图像进行激光点自动检测,对图像进行预处理、形态学操作,自动获取激光点的位置。
13.所述的形态学操作包括腐蚀和膨胀;(6)以步骤(3)获取的标志盘中心点为坐标轴圆心建立坐标轴,计算激光点圆心和标志盘中心点之间的横向像素值和纵向像素值。
14.(7)根据标志盘的距离尺度,对步骤(6)获取的横纵向像素值进行实际距离换算,自动输出激光点的实时坐标值。
15.有益效果:相对于现有技术,本发明具有以下优点:与传统的监测技术相比,本发明高效、可靠性高的特点,相对于传统的人工现场监测方法更具有自动化和实时性的优势。
16.1、本发明采用计算机视觉技术,避免人工读取激光点位偏移的观测误差,监测结果更加高效精确。
17.2、本发明采用的计算机视觉技术对视频图像达到30fps的处理速度,实现了实时监测的要求,监测结果更贴合建筑真实动态特性。
18.3、本发明装置拆卸简单、移动便捷,可以实现施工过程中建筑分阶段的连续动态监测,且实施过程中干扰小、稳定性高。
附图说明
19.图1为本发明的流程图;图2为本发明使用的计算机视觉技术中视频图像关键点检测的流程图;图3为实施例1现场监测装置系统示意图;图4为视频图像中的标志盘图;图5为激光点圆心和标志盘中心点之间的横向像素值和纵向像素值示意图;图6为监测轨迹经拟合后的x、y坐标变化曲线图;图7为激光点的运动轨迹图。
20.图中主要附图标记的说明:1-激光发射设备、2-图像采集设备、3-激光接收设备、a-激光点圆心、b标志盘中心点。
具体实施方式
21.以下将结合具体实施例说明本发明的技术方案:实施例1:如图1所示,一种基于计算机视觉技术的超高层建筑结构动态特性监测方法,包括以下步骤:1、采用现场监测装置系统,将激光发射设备安装在建筑塔体拟监测起始楼层(如1楼)相应的预留孔洞位置处,以塔体各楼层的控制点预留孔作为激光向上的传递路径,激光接收设备3安装在拟监测终止楼层(如20楼)接收向上传递的激光,同时将图像采集设备2架设在拟监测终止楼层的上一楼层(如19楼)采集激光接收设备3上的视频图像。现场监测装置系统如图3所示。
22.2、将步骤(1)中图像采集设备2连续采集(如48h)的激光位置变化的视频图像通过无线或5g网络传输至服务器进行图像处理获取激光点位置坐标。
23.3、对服务器中的视频图像采用计算机视觉技术,对步骤(2)采集的视频图像中的标志盘关键点进行检测,视频图像关键点检测流程图如图2所示,对图像进行预处理,包括灰度化和自适应阈值二值化,通过对棋盘格直线进行结构化元素检测以及图像腐蚀和膨胀操作,获取标志盘的直线。对标志盘的横向直线和纵向直线的交点进行判断,获取标志盘的四个角点,进一步地获取标志盘中心点b。具体的标志盘的中心点b如图4所示。
24.4、基于透视变换方法,利用步骤(3)检测的标志盘四个角点,对视频图像进行矫正。
25.5、利用步骤(4)矫正后的图像进行激光点自动检测,自动获取激光点的位置,对图像进行灰度化和自适应阈值二值化处理,对图像进行形态学操作,包括腐蚀和膨胀,对膨胀后的图像进行连通区域标记及属性提取,对连通域进行过滤和拟合,获取光点轮廓,进一步地获取激光点圆心a。
26.6、以步骤(3)检测的标志盘中心点b为坐标轴圆心建立坐标轴,其中标志盘中心点的坐标值为(0.00mm,0.00mm),计算激光点圆心a和标志盘中心点b之间的横向像素值和纵向像素值,如某一时间点15:20的横纵向像素值为(6pixel,9pixel)。激光点圆心和标志盘中心点的横纵向像素值如图5所示。
27.7、根据标志盘的距离尺度,其中图像像素750*750pixel,长度为160mm*160mm,即图像中每毫米的像素值为750/160=4.6875pixel/mm。图像中对步骤(6)获取的横纵向像素值进行实际距离换算,自动输出激光点的实时坐标值,如某一时间点15:20的坐标值为(6/4.6875mm,9/4.6875mm),即(1.28mm,1.92mm),最终通过此计算方法输出连续监测时间段内(如48小时)不同时间点的的激光点的所有坐标值。
28.8、通过对步骤(7)所输出的所有坐标值进行剔除噪声,并采用多项式、傅立叶变换等数学方法进行拟合和分析,获得了x坐标和y坐标变化曲线,如图6所示。从而绘制激光点的运动轨迹,即建筑结构1层~20层的动态特性,如图7所示。
29.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。