技术特征:
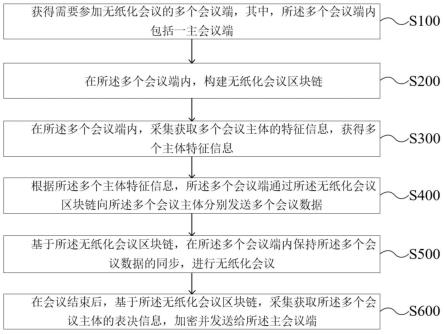
1.一种基于支持向量机的水下滑翔机参数辨识方法,其特征在于步骤如下:步骤1:给定水下滑翔机系统输入10
°
/10
°
差动舵信号,使得水下滑翔机在横平面内做z字形运动,获得水下滑翔机机在10
°
/10
°
差动舵信号下的输出数据,包括输入的水下滑翔机状态数据x,水下滑翔机的力或力矩y;步骤2:根据水下滑翔机做z字形运动,水下滑翔机动力学方程动力学方程y=w
t
x b,其中偏置常数b为零,改为y=w
t
x,w为需要辨识的水动力参数;步骤3:确定支持向量机回归的核函数和超参数取值;确定支持向量机回归算法为ε-svr,核函数选择线性核函数k(x
i
,x
j
)=<x
i
,x
j
>,超参数ε=0.1,损失函数权重c=1.414;由支持向量机回归算法得到水动力参数:α
i
和α
i*
为模型常数;步骤4:采集n个步骤1所输出的数据,采用序列最小优化法计算α
i
、以已知x
i
计算得到水下滑翔机的水动力参数w。2.根据权利要求1所述基于支持向量机的水下滑翔机参数辨识方法,其特征在于:所述水下滑翔机动力学方程动力学方程的侧向速度v
z
动力学方程为:其中:其中:c
z
(v)=m[v
y
w
x-v
x
w
y
x
c
w
z
w
x
y
c
w
y
w
z-z
c
(w
x2
w
y2
)]其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,v
y
,v
z
为水下滑翔机三个方向的线速度,w
x
,w
y
,w
z
为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。3.根据权利要求1所述基于支持向量机的水下滑翔机参数辨识方法,其特征在于:所述水下滑翔机动力学方程动力学方程的横滚角速度w
x
动力学方程为:其中:其中:c
k
(v)=[my
c
(v
y
w
x-v
x
w
y
) mz
c
(v
z
w
x-v
x
w
z
) (j
zz-j
yy
)w
y
w
z
]其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,v
y
,v
z
为水下滑翔机三个方向的线速度,w
x
,w
y
,w
z
为水下滑
翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。4.根据权利要求1所述基于支持向量机的水下滑翔机参数辨识方法,其特征在于:所述水下滑翔机动力学方程动力学方程的航向角速度w
y
动力学方程为:其中:其中:c
m
(v)=[mz
c
(v
z
w
y-v
y
w
z
) mx
c
(v
x
w
y-v
y
w
z
) (j
xx-j
zz
)w
z
w
x
]其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,v
y
,v
z
为水下滑翔机三个方向的线速度,w
x
,w
y
,w
z
为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。5.根据权利要求2或3或4所述基于支持向量机的水下滑翔机参数辨识方法,其特征在于:所述三个线速度的合速度v表达式如下:于:所述三个线速度的合速度v表达式如下:于:所述三个线速度的合速度v表达式如下:λ
33
,λ
35
,λ
44
,λ
55
为滑翔机的惯性水动力系数;选择滑翔机的浮心为坐标原点,x
c
,y
c
,z
c
为滑翔机的质心到浮心的距离;j
xx
,j
yy
,j
zz
为转动惯量;c
zβ
,,m
xβ
,m
yβ
,为水动力系数,即要辨识的参数。6.根据权利要求1所述基于支持向量机的水下滑翔机参数辨识方法,其特征在于:所述步骤4的n为200个。
技术总结
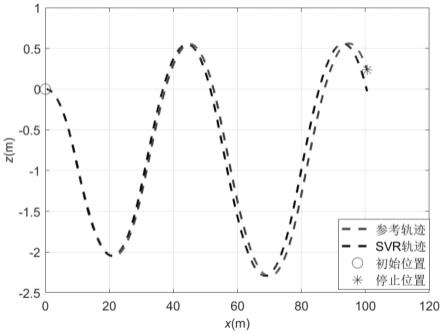
本发明涉及一种基于支持向量机的水下滑翔机参数辨识方法,采用线性核函数,得到复杂度较低的模型,易从训练的模型中推导出系统的参数,且求解的参数为全局最优解,具有较强的泛化能力,避免了局部极值现象,较适用于工程实践;其次,与神经网络相比,在相对较少的数据量和计算量情况下,得到了较好的辨识效果,辨识相对误差低于0.023。基于线性核的支持向量机参数辨识方法与其他的智能辨识方法相比,比如神经网络,得到的模型结构相对简单,容易从训练得到的模型中推导出系统的参数,且求解的参数为全局最优解,具有较强的泛化能力,避免了局部极值现象,较适用于工程实践。较适用于工程实践。较适用于工程实践。
技术研发人员:高剑 陈依民 张福斌 潘光 宋保维 彭星光
受保护的技术使用者:西北工业大学
技术研发日:2022.08.12
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。