1.本发明属于水下滑翔机的参数辨识方法,涉及一种基于支持向量机的水下滑翔机参数辨识方法。
背景技术:
2.水下滑翔机是替代人类在水下进行资源勘探、环境检测、安全监控、救援搜救等工作的有效工具,为了有效完成任务,需要实现对水下滑翔机的精确控制。目前,水下滑翔机控制器设计大都采用以牛顿定理和拉格朗日方程为基础的6自由度方程。由于水下滑翔机与流体间的相互作用难以用传感器直接测量,该模型中引入了大量以水动力系数为表现形式的水动力/力矩项。这些系数取决于滑翔机外形、运动状况、环境因素等,增加了模型的不确定性,因此确定水动力系数是建立水下滑翔机控制模型需要解决的首要问题和关键所在。
3.在工程应用中,获得水动力系数的方法主要有数值计算法、水池平面机构测试法和参数辨识法。数值计算法通常采用流体计算(cfd)软件分析,计算量较大,网格划分方法和边界条件对结果有影响;水池平面机构实验中传感器及操作误差等使得结果可信度不高,且计算周期较长;参数辨识是近年来在水动力系数求取中应用较多的一种的方法,成本低,能较好地反映实际运动中的流体作用,且参数辨识与智能算法结合后可增强辨识结果对环境的适应性。
4.支持向量机回归(support vector regression,svr)作为一种新兴的方法应用于参数辨识,支持向量机与神经网络相比有更严格的数学理论支持,可解释性强,不依靠统计方法,简化了通常的分类和回归问题,主要用于处理小样本问题,在解决分类和回归问题方面具有良好性能。支持向量机是针对有限样本的,不需要对参数进行初始估计,具有良好的泛化性能,其求解转化为凸函数求解,具有全局最优性。在辨识水下滑翔机水动力系数问题上,通常选择ε-svr方法,核函数选择线性核函数。
技术实现要素:
5.要解决的技术问题
6.为了避免现有技术的不足之处,本发明提出一种基于支持向量机的水下滑翔机参数辨识方法。
7.技术方案
8.一种基于支持向量机的水下滑翔机参数辨识方法,其特征在于步骤如下:
9.步骤1:给定水下滑翔机系统输入10
°
/10
°
差动舵信号,使得水下滑翔机在横平面内做z字形运动,获得水下滑翔机机在10
°
/10
°
差动舵信号下的输出数据,包括输入的水下滑翔机状态数据x,水下滑翔机的力或力矩y;
10.步骤2:根据水下滑翔机做z字形运动,水下滑翔机动力学方程动力学方程y=w
t
x b,其中偏置常数b为零,改为y=w
t
x,w为需要辨识的水动力参数;
11.步骤3:确定支持向量机回归的核函数和超参数取值;
12.确定支持向量机回归算法为ε-svr,核函数选择线性核函数k(xi,xj)=《xi,xj》,超参数ε=0.1,损失函数权重c=1.414;
13.由支持向量机回归算法得到水动力参数:
14.αi和α
i*
为模型常数;
15.步骤4:采集n个步骤1所输出的数据,采用序列最小优化法计算αi、以已知xi计算得到水下滑翔机的水动力参数w。
16.所述水下滑翔机动力学方程动力学方程的侧向速度vz动力学方程为:
[0017][0018]
其中:
[0019][0020]cz
(v)=m[vyw
x-v
x
wy xcwzw
x
ycwyw
z-zc(w
x2
w
y2
)]
[0021][0022]
其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,vy,vz为水下滑翔机三个方向的线速度,w
x
,wy,wz为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。
[0023]
所述水下滑翔机动力学方程动力学方程的横滚角速度w
x
动力学方程为:
[0024][0025]
其中:
[0026][0027]ck
(v)=[myc(vyw
x-v
x
wy) mzc(vzw
x-v
x
wz) (j
zz-j
yy
)wywz]
[0028][0029]
其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,vy,vz为水下滑翔机三个方向的线速度,w
x
,wy,wz为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。
[0030]
所述水下滑翔机动力学方程动力学方程的航向角速度wy动力学方程为:
[0031][0032]
其中:
[0033]
[0034]cm
(v)=[mzc(vzw
y-vywz) mxc(v
xwy-vywz) (j
xx-j
zz
)wzw
x
]
[0035][0036]
其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,vy,vz为水下滑翔机三个方向的线速度,w
x
,wy,wz为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度。
[0037]
所述三个线速度的合速度v表达式如下:
[0038][0039][0040][0041]
λ
33
,λ
35
,λ
44
,λ
55
为滑翔机的惯性水动力系数;选择滑翔机的浮心为坐标原点,xc,yc,zc为滑翔机的质心到浮心的距离;j
xx
,j
yy
,j
zz
为转动惯量;c
zβ
,,m
xβ
,m
yβ
,为水动力系数,即要辨识的参数。
[0042]
所述步骤4的n为200个。
[0043]
有益效果
[0044]
本发明提出的一种基于支持向量机的水下滑翔机参数辨识方法,采用线性核函数,得到复杂度较低的模型,易从训练的模型中推导出系统的参数,且求解的参数为全局最优解,具有较强的泛化能力,避免了局部极值现象,较适用于工程实践;其次,与神经网络相比,在相对较少的数据量和计算量情况下,得到了较好的辨识效果,辨识相对误差低于0.023。
[0045]
通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点如下:
[0046]
1、本发明首次提出采用支持向量机的方法解决水下滑翔机参数辨识问题;
[0047]
2、基于线性核的支持向量机参数辨识方法与其他的智能辨识方法相比,比如神经网络,得到的模型结构相对简单,容易从训练得到的模型中推导出系统的参数,且求解的参数为全局最优解,具有较强的泛化能力,避免了局部极值现象,较适用于工程实践;
[0048]
3、与神经网络相比,在相对较少的数据量和计算量情况下,得到了较好的辨识效果,辨识相对误差低于0.023。
附图说明
[0049]
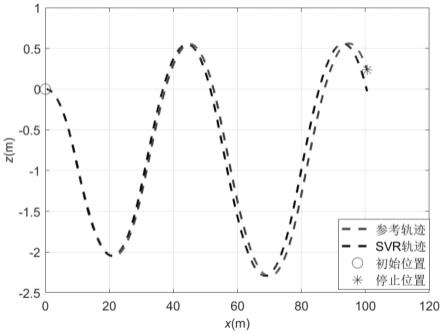
图1:svr辨识参数水平面轨迹
具体实施方式
[0050]
现结合实施例、附图对本发明作进一步描述:
[0051]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合表格和仿真结果,
对本发明进行进一步详细说明。应当理解,此处所描述的具体实例仅用以解释本发明,并不限定用于本发明。
[0052]
步骤1中,获取水下滑翔机机动性比较好的数据,系统输入10
°
/10
°
差动舵角信号,使得水下滑翔机在横平面内做z字形运动。
[0053]
步骤2中,基于支持向量机回归的方法辨识参数要求输入输出数据满足关系为:
[0054]
y=w
t
x b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0055]
其中,w为参数,x为输入数据,为未知函数,b为偏置常数,y为输出数据。
[0056]
考虑到滑翔机做z字形运动时,水平面运动模态得以充分激励,故仅辨识水平面vz,w
x
,wy的相关系数,为了简化辨识的过程,参数辨识中不涉及惯性水动力系数,改写动力学方程为y=w
t
x形式。
[0057]
1)水下滑翔机侧向速度vz动力学方程为:
[0058][0059]
其中:
[0060][0061]cz
(v)=m[vyw
x-v
x
wy xcwzw
x
ycwyw
z-zc(w
x2
w
y2
)]
[0062][0063]
2)水下滑翔机横滚角速度w
x
动力学方程为:
[0064][0065]
其中:
[0066][0067]ck
(v)=[myc(vyw
x-v
x
wy) mzc(vzw
x-v
x
wz) (j
zz-j
yy
)wywz]
[0068][0069]
3)水下滑翔机航向角速度wy动力学方程为:
[0070][0071]
其中:
[0072][0073]cm
(v)=[mzc(vzw
y-vywz) mxc(v
xwy-vywz) (j
xx-j
zz
)wzw
x
]
[0074][0075]
其中,m为水下滑翔机的质量,g为水下滑翔机的重力,s为水下滑翔机横截面积,l为水下滑翔机长度,ρ为水的密度。v
x
,vy,vz为水下滑翔机三个方向的线速度,w
x
,wy,wz为水下滑翔机三个方向的角速度;ψ为航向角,θ为俯仰角,为横滚角,α为攻角,β为侧滑角,为滑翔机的线加速度和角加速度,v为三个线速度的合速度,表达式如下:
[0076][0077][0078][0079]
λ
33
,λ
35
,λ
44
,λ
55
为滑翔机的惯性水动力系数;选择滑翔机的浮心为坐标原点,xc,yc,zc为滑翔机的质心到浮心的距离;j
xx
,j
yy
,j
zz
为转动惯量;c
zβ
,,m
xβ
,m
yβ
,为水动力系数,即要辨识的参数。
[0080]
步骤3中确定支持向量机回归算法为ε-svr,核函数选择线性核函数k(xi,xj)=《xi,xj》,超参数ε=0.1,损失函数权重c=1.414,进入到步骤4中,支持向量机回归目标函数为:
[0081][0082]
约束条件
[0083]
其中w为待求解参数,c为损失函数权重,f为未知函数,xi为输入样本数据,yi为测试样本数据,ξi和ξ
i*
为松弛变量,ε为超参数。
[0084]
将方程引入拉格朗日乘子转化成无约束问题得到等式:
[0085]
其中,αi,μi,为引入的拉格朗日乘子。原问题转化为:
[0086][0087]
最小化l(w,b,ξ,ξ
*
),对w,b,ξ,ξ
*
求偏导并令其为0可得:
[0088][0089][0090]
c=αi ui[0091]
c=α
i*
u
i*
[0092]
αi和α
i*
采用序列最小优化法(sequential minimal optimization,smo)进行求解,选择线性核函数,从而得到参数w:
[0093]
[0094]
结合水下滑翔机模型,(8)式中w为待辨识的水动力系数,m为该系统样本总量,本发明中n=200,αi和α
i*
为模型常数,为未知函数,xi为系统输入样本数据。
[0095]
本发明中,选取线性核函数,即则有:
[0096][0097]
1)本发明中,辨识vz相关参数,
[0098]
2)本发明中,辨识w
x
相关参数,
[0099]
3)本发明中,辨识wy相关参数,
[0100]
辨识三次,即得到辨识的水动力系数c
zβ
,m
xβ
,m
yβ
和
[0101]
表1 svr辨识参数结果
[0102]
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。