技术特征:
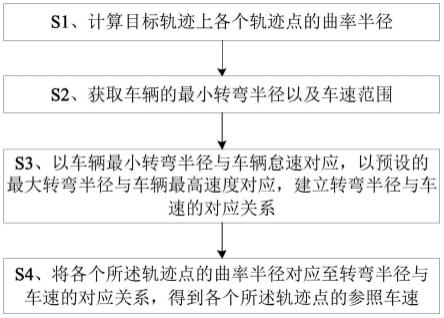
1.一种无人循迹驾驶速度规划的方法,其特征在于,包括步骤:s1、计算目标轨迹上各个轨迹点的曲率半径;s2、获取车辆的最小转弯半径以及车速范围;s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。2.根据权利要求1所述的一种无人循迹驾驶速度规划的方法,其特征在于,所述步骤s1具体为:遍历所述目标轨迹上的各个轨迹点,对于每个遍历到的当前轨迹点,分别获取前后预设距离的另一轨迹点,并连接为三角形,计算三角形的外接圆半径,即所述当前轨迹点的曲率半径。3.根据权利要求2所述的一种无人循迹驾驶速度规划的方法,其特征在于,所述计算三角形的外接圆半径具体为:获取当前轨迹点以及前后预设距离两个轨迹点的坐标pn(x1,y1)、pn 1(x2,y2)和pn-1(x3,y3),根据坐标计算三个坐标两两间的距离d
12
、d
23
和d
13
;计算三个轨迹点组成的三角形的面积s_area:并结合三角形的面积计算外接圆半径r:4.根据权利要求1所述的一种无人循迹驾驶速度规划的方法,其特征在于,所述步骤s3具体为:以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,以线性对应的方式建立转弯半径与车速的对应关系。5.根据权利要求1所述的一种无人循迹驾驶速度规划的方法,其特征在于,所述步骤s4之后还包括步骤:s5、以所述参照速度为速度上限,在车辆循迹驾驶时对车速进行调控。6.一种无人循迹驾驶速度规划的终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现以下步骤:s1、计算目标轨迹上各个轨迹点的曲率半径;s2、获取车辆的最小转弯半径以及车速范围;s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。7.根据权利要求6所述的一种无人循迹驾驶速度规划的终端,其特征在于,所述步骤s1
具体为:遍历所述目标轨迹上的各个轨迹点,对于每个遍历到的当前轨迹点,分别获取前后预设距离的另一轨迹点,并连接为三角形,计算三角形的外接圆半径,即所述当前轨迹点的曲率半径。8.根据权利要求7所述的一种无人循迹驾驶速度规划的终端,其特征在于,所述计算三角形的外接圆半径具体为:获取当前轨迹点以及前后预设距离两个轨迹点的坐标pn(x1,y1)、pn 1(x2,y2)和pn-1(x3,y3),根据坐标计算三个坐标两两间的距离d
12
、d
23
和d
13
;计算三个轨迹点组成的三角形的面积s_area:并结合三角形的面积计算外接圆半径r:9.根据权利要求6所述的一种无人循迹驾驶速度规划的终端,其特征在于,所述步骤s3具体为:以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,以线性对应的方式建立转弯半径与车速的对应关系。10.根据权利要求6所述的一种无人循迹驾驶速度规划的终端,其特征在于,所述步骤s4之后还包括步骤:s5、以所述参照速度为速度上限,在车辆循迹驾驶时对车速进行调控。
技术总结
本发明公开了一种无人循迹驾驶速度规划的方法,计算目标轨迹上各个轨迹点的曲率半径;获取车辆的最小转弯半径以及车速范围;以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速;能够对车速进行限制,简单且较合理地对无人车的行驶速度进行初步规划,能够使车辆在入弯、转弯的情况下进行减速处理,减少无人车弯道速度过快导致翻车的可能性。能性。能性。
技术研发人员:何春洪
受保护的技术使用者:江苏盛海智能科技有限公司
技术研发日:2022.10.12
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。