1.本发明涉及无人循迹驾驶技术领域,特别涉及一种无人循迹驾驶速度规划的方法与终端。
背景技术:
2.无人驾驶是目前的一个技术趋势,特别是一些特种领域,更是只能以无人驾驶才能使用。无人驾驶循迹则是一直有效的自主按预设轨迹进行行驶的方法,预设轨迹通常只提供位置轨迹数据,对于行驶速度,无数据依据,仅通过循迹参数设置目标速度,这种情况下,设置速度无法适应变化路线的要求,会有弯道速度过快等情况发生,无法按照轨迹的最理想速度去行驶。
技术实现要素:
3.本发明所要解决的技术问题是:提供一种无人循迹驾驶速度规划的方法与终端,能够对无人循迹驾驶提供有效的速度控制。
4.为了解决上述技术问题,本发明采用的技术方案为:
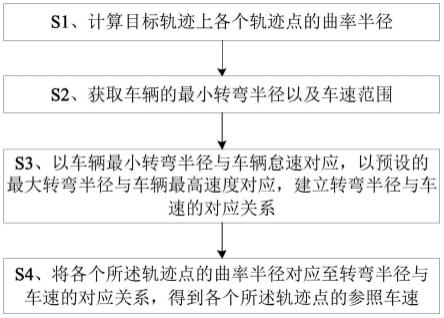
5.一种无人循迹驾驶速度规划的方法,包括步骤:
6.s1、计算目标轨迹上各个轨迹点的曲率半径;
7.s2、获取车辆的最小转弯半径以及车速范围;
8.s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;
9.s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。
10.为了解决上述技术问题,本发明采用的另一种技术方案为:
11.一种无人循迹驾驶速度规划的终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
12.s1、计算目标轨迹上各个轨迹点的曲率半径;
13.s2、获取车辆的最小转弯半径以及车速范围;
14.s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;
15.s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。
16.本发明的有益效果在于:本发明的一种无人循迹驾驶速度规划的方法与终端,通过对车辆转弯半径以及车速范围进行对应,得到一个转弯半径与速度的对应关系,根据循迹驾驶目标轨迹的轨迹点的曲率半径在对应关系中匹配,得到一个参考车速,进而给整个目标轨迹附加速度参数,用以对车速进行限制,简单且较合理地对无人车的行驶速度进行
初步规划,能够使车辆在入弯、转弯的情况下进行减速处理,减少无人车弯道速度过快导致翻车的可能性。
附图说明
17.图1为本发明实施例的一种无人循迹驾驶速度规划的方法的流程图;
18.图2为本发明实施例的一种无人循迹驾驶速度规划的终端的结构图;
19.标号说明:
20.1、一种无人循迹驾驶速度规划的终端;2、处理器;3、存储器。
具体实施方式
21.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
22.请参照图1,一种无人循迹驾驶速度规划的方法,包括步骤:
23.s1、计算目标轨迹上各个轨迹点的曲率半径;
24.s2、获取车辆的最小转弯半径以及车速范围;
25.s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;
26.s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。
27.从上述描述可知,本发明的有益效果在于:本发明的一种无人循迹驾驶速度规划的方法与终端,通过对车辆转弯半径以及车速范围进行对应,得到一个转弯半径与速度的对应关系,根据循迹驾驶目标轨迹的轨迹点的曲率半径在对应关系中匹配,得到一个参考车速,进而给整个目标轨迹附加速度参数,用以对车速上限进行限制,简单且较合理地对无人车的行驶速度进行初步规划,能够使车辆在入弯、转弯的情况下进行减速处理,减少无人车弯道速度过快导致翻车的可能性。
28.进一步地,所述步骤s1具体为:
29.遍历所述目标轨迹上的各个轨迹点,对于每个遍历到的当前轨迹点,分别获取前后预设距离的另一轨迹点,并连接为三角形,计算三角形的外接圆半径,即所述当前轨迹点的曲率半径。
30.由上述描述可知,获取前后预设距离的两点,连接为三角形,通过计算三角形的外接圆半径,实现曲率半径的估算。
31.进一步地,所述计算三角形的外接圆半径具体为:
32.获取当前轨迹点以及前后预设距离两个轨迹点的坐标pn(x1,y1)、pn 1(x2,y2)和pn-1(x3,y3),根据坐标计算三个坐标两两间的距离d
12
、d
23
和d
13
;
33.计算三个轨迹点组成的三角形的面积s_area:
[0034][0035]
并结合三角形的面积计算外接圆半径r:
[0036][0037]
由上述描述可知,通过上述方式计算得到三角形的外接圆半径圆。
[0038]
进一步地,所述步骤s3具体为:
[0039]
以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,以线性对应的方式建立转弯半径与车速的对应关系。
[0040]
由上述描述可知,以线性对应的方式建立转弯半径与车速的对应关系,在接近直线行驶时,对应的车速越接近车辆最高车速,而在转弯半径越小,即弯道越曲时,车速越接近怠速。
[0041]
进一步地,所述步骤s4之后还包括步骤:
[0042]
s5、以所述参照速度为速度上限,在车辆循迹驾驶时对车速进行调控。
[0043]
由上述描述可知,以通过匹配关系得到的速度作为速度上限,对车速进行限制,从而减少车速过快产生危险的可能性。
[0044]
请参照图2,一种无人循迹驾驶速度规划的终端,包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0045]
s1、计算目标轨迹上各个轨迹点的曲率半径;
[0046]
s2、获取车辆的最小转弯半径以及车速范围;
[0047]
s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;
[0048]
s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。
[0049]
从上述描述可知,本发明的有益效果在于:本发明的一种无人循迹驾驶速度规划的方法与终端,通过对车辆转弯半径以及车速范围进行对应,得到一个转弯半径与速度的对应关系,根据循迹驾驶目标轨迹的轨迹点的曲率半径在对应关系中匹配,得到一个参考车速,进而给整个目标轨迹附加速度参数,用以对车速上限进行限制,简单且较合理地对无人车的行驶速度进行初步规划,能够使车辆在入弯、转弯的情况下进行减速处理,减少无人车弯道速度过快导致翻车的可能性。
[0050]
进一步地,所述步骤s1具体为:
[0051]
遍历所述目标轨迹上的各个轨迹点,对于每个遍历到的当前轨迹点,分别获取前后预设距离的另一轨迹点,并连接为三角形,计算三角形的外接圆半径,即所述当前轨迹点的曲率半径。
[0052]
由上述描述可知,获取前后预设距离的两点,连接为三角形,通过计算三角形的外接圆半径,实现曲率半径的估算。
[0053]
进一步地,所述计算三角形的外接圆半径具体为:
[0054]
获取当前轨迹点以及前后预设距离两个轨迹点的坐标pn(x1,y1)、pn 1(x2,y2)和pn-1(x3,y3),根据坐标计算三个坐标两两间的距离d
12
、d
23
和d
13
;
[0055]
计算三个轨迹点组成的三角形的面积s_area:
[0056][0057]
并结合三角形的面积计算外接圆半径r:
[0058][0059]
由上述描述可知,通过上述方式计算得到三角形的外接圆半径圆。
[0060]
进一步地,所述步骤s3具体为:
[0061]
以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,以线性对应的方式建立转弯半径与车速的对应关系。
[0062]
由上述描述可知,以线性对应的方式建立转弯半径与车速的对应关系,在接近直线行驶时,对应的车速越接近车辆最高车速,而在转弯半径越小,即弯道越曲时,车速越接近怠速。
[0063]
进一步地,所述步骤s4之后还包括步骤:
[0064]
s5、以所述参照速度为速度上限,在车辆循迹驾驶时对车速进行调控。
[0065]
由上述描述可知,以通过匹配关系得到的速度作为速度上限,对车速进行限制,从而减少车速过快产生危险的可能性。
[0066]
本发明的一种无人循迹驾驶速度规划的方法与终端,适用于无人循迹驾驶车辆执行无人循迹驾驶任务的速度规划控制。
[0067]
请参照图1,本发明的实施例一为:
[0068]
一种无人循迹驾驶速度规划的方法,包括步骤:
[0069]
s1、计算目标轨迹上各个轨迹点的曲率半径;
[0070]
所述步骤s1具体为:
[0071]
遍历所述目标轨迹上的各个轨迹点,对于每个遍历到的当前轨迹点,分别获取前后预设距离的另一轨迹点,并连接为三角形,计算三角形的外接圆半径,即所述当前轨迹点的曲率半径;
[0072]
所述计算三角形的外接圆半径具体为:
[0073]
获取当前轨迹点以及前后预设距离两个轨迹点的坐标pn(x1,y1)、pn 1(x2,y2)和pn-1(x3,y3),根据坐标计算三个坐标两两间的距离d
12
、d
23
和d
13
;
[0074]
计算三个轨迹点组成的三角形的面积s_area:
[0075][0076]
并结合三角形的面积计算外接圆半径r:
[0077][0078]
本实施例中,轨迹为一系列有序定位点,即坐标点,坐标系为地理坐标系,每个定位点为经纬度,由于车辆行驶范围不大,忽略高度对定位点的影响。由于轨迹点为离散点,采用三角形计算方法得出每个点(pn)和前后预设距离点(pn-1及pn 1)所组成的三角形的面积。本实施例中,预设距离为5m,在其他等同实施例中,预设距离可以根据实际需求调整。再由三角形面积和三边长度关系得到三角形外接圆半径,以此半径作为pn点的曲率半径。
轨迹点组成三角形有3类特殊的点,一类是起始附近点,回推找到的第一个点边长太短,计算得到三角形面积过小,从而计算三角形高误差大,第二类是结束附近点,前推找到的第3个点边长太短,同样三角形面积小,第三类点为接近直线点,同样三角形面积小,无法计算从而得出每个点的曲率半径。对于接近起点和结束点的轨迹点,由于无法构成边长够长的三角形,因此标记为车辆的最小转弯半径。对于直线点标记为直线,标记转弯半径为预设的最大转弯半径。从而得到一条轨迹的每个点的曲率半径rn。本实施例中,预设的最大转弯半rn_max=200米,200米为经验值,大于200米可认为近似直线,在其他等同实施例中,可根据实际需求调整。
[0079]
s2、获取车辆的最小转弯半径以及车速范围。
[0080]
本实施例中,根据车辆类型,获取车辆的最小转弯半径(r_min)和车速范围(v_min怠速,v_max最高车速),例如差速转向系统可原地转向r_min=0米,而阿克曼转向系统只能按车辆设计最小转弯半径转向。
[0081]
s3、以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,建立转弯半径与车速的对应关系;
[0082]
所述步骤s3具体为:
[0083]
以车辆最小转弯半径与车辆怠速对应,以预设的最大转弯半径与车辆最高速度对应,以线性对应的方式建立转弯半径与车速的对应关系。
[0084]
本实施例中,将r_min和v_min对应,r_max和v_max进行对应,本专利采用最简单的线性对应,从而形成转弯半径与速度的对应关系。在相同车辆状态情况下,相同的转弯半径下,车速越大,越容易打滑,反过来,车速不变,转弯半径越小,越容易打滑,每个车速下的打滑最小半径是可以实验得到的,从而根据轨迹上的转弯半径,去限制车辆能达到的速度,使车辆在轨迹的转弯半径下,速度低于侧滑速度。
[0085]
本实施例中,对应的方式采用线性对应的方式,在其他等同实施例中,出于其他方面考虑,可以调整为使用非线性对应的方式,一种示例如下:
[0086]
r_min和v_min对应,
[0087]
r_mid和v_max对应,
[0088]
大于r_mid都以v_max速度。
[0089]
其中,r_mid表示曲率半径的某个中间值,当v_max最大速度不大时,在r_mid曲率半径时也能安全稳定行驶,则不需按r_max进行对应。中间段线性对应,头尾端为固定值,对应曲线为上升后平的过程。
[0090]
本发明并未给出具体数值,不同车型数值只给出一个关系,转弯半径和速度的关系,轨迹确定,从而得到速度上限,从而知道车辆速度低于上限,从而避免侧滑,达到安全循迹目的。
[0091]
s4、将各个所述轨迹点的曲率半径对应至转弯半径与车速的对应关系,得到各个所述轨迹点的参照车速。
[0092]
由对应关系,可以得出每个rn对应的速度vn,从而给目标轨迹的各个轨迹点附加一个速度参数,即参照车速。
[0093]
所述步骤s4之后还包括步骤:
[0094]
s5、以所述参照速度为速度上限,在车辆循迹驾驶时对车速进行调控。
[0095]
本实施例中,将这个速度参数为车辆安全行驶的指导速度,高于此速度则有超速风险,从而给循迹一个速度指标参考。无人驾驶循迹需要对速度进行控制,对于不同道路形有不同安全通过速度,并不能一成不变按一个速度去跑各种路形,本发明提供一个安全速度参数供循迹参考,循迹速度控制时,参考此参数,可对速度进行限制控制,避免弯道速度过快,翻车危险。
[0096]
请参照图2,本发明的实施例二为:
[0097]
一种无人循迹驾驶速度规划的终端1,包括处理器2、存储器3以及存储在所述存储器3中并可在所述处理器2上运行的计算机程序,所述处理器2执行所述计算机程序时实现以上实施例一中的一种无人循迹驾驶速度规划的方法的步骤。
[0098]
综上所述,本发明提供的一种无人循迹驾驶速度规划的方法与终端,通过对车辆转弯半径以及车速范围进行对应,得到一个转弯半径与速度的对应关系,根据循迹驾驶目标轨迹的轨迹点的曲率半径在对应关系中匹配,得到一个参考车速,进而给整个目标轨迹附加速度参数,用以对车速进行限制,简单且较合理地对无人车的行驶速度进行初步规划,能够使车辆在入弯、转弯的情况下进行减速处理,减少无人车弯道速度过快导致翻车的可能性。
[0099]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
