技术特征:
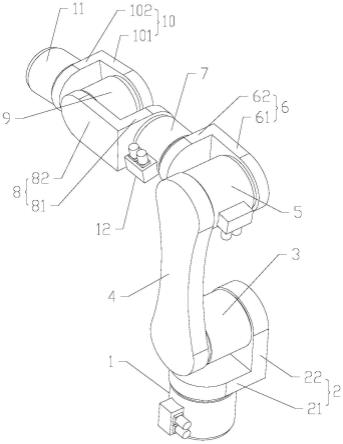
1.一种六轴机器人,其特征在于,包括转座、大臂、肩臂、小臂、腕体;所述六轴机器人还包括:第一电机,与所述转座相连,能驱动所述转座转动;第二电机,设在所述转座上,与所述大臂相连,能驱动所述大臂转动;第三电机,设在所述大臂上,与所述肩臂相连,能驱动所述肩臂转动;第四电机,设在所述肩臂上,与所述小臂相连,能驱动所述小臂转动;第五电机,设在所述小臂上,与所述腕体相连,能驱动所述腕体转动;第六电机,设在所述腕体上;其中,所述第一电机、所述第二电机、所述第三电机、所述第四电机、所述第五电机和所述第六电机中至少一者为直驱电机。2.根据权利要求1所述的六轴机器人,其特征在于,所述转座包括第一座板和第二座板,所述第一座板与所述第二座板连接并合围出第一夹角,所述第一电机位于所述第一座板的一侧,且所述第一电机的输出端与所述第一座板相连,所述第一夹角位于所述第一座板背对所述第一电机的一侧,所述第二电机以凸起于所述第二座板表面的形式设置在所述第二座板上,并且容纳于所述第一夹角中。3.根据权利要求2所述的六轴机器人,其特征在于,所述第二电机远离所述第二座板的一端为所述第二电机的输出端,所述大臂沿长度方向的一端覆盖所述第二电机的输出端,并且与所述第二电机的输出端相连,所述大臂沿长度方向的另一端设有所述第三电机,所述第二电机与所述第三电机位于所述大臂的同一侧,其中,沿所述大臂的长度方向,所述第二电机与所述第三电机之间位置对应并且具有间距;所述第一夹角为直角。4.根据权利要求1至3中任一项所述的六轴机器人,其特征在于,所述肩臂包括第三座板和第四座板,所述第三座板与所述第四座板连接并合围出第二夹角,所述第三电机以凸起于所述大臂表面的形式设置在所述大臂上,并伸入所述第二夹角中,所述第三电机的输出端与所述第三座板连接并被所述第三座板覆盖,所述第四电机位于所述第四座板背对所述第二夹角的一侧。5.根据权利要求4所述的六轴机器人,其特征在于,所述第四电机以凸起于所述第四座板表面的形式设置在所述第四座板上,所述第四电机远离所述第四座板的一端为所述第四电机的输出端,所述小臂与所述第四电机的输出端连接;所述第二夹角为直角。6.根据权利要求1至3中任一项所述的六轴机器人,其特征在于,所述小臂包括相互连接的第五座板与第六座板,所述第五座板覆盖所述第四电机的输出端并且与所述第四电机的输出端相连,所述第五座板背对所述第四电机的一侧与所述第六座板围成第三夹角;所述第五电机位于所述第三夹角中,并以凸起于所述第六座板表面的形式设置在所述第六座板上,所述第五电机远离所述第六座板的一端为所述第五电机的输出端;所述腕体包括第七座板与第八座板,所述第七座板与所述第八座板连接并合围出第四
夹角,所述第五电机伸入所述第四夹角中,所述第五电机的输出端与所述第七座板连接并且被所述第七座板覆盖;所述第八座体背对所述第四夹角的一侧设置有所述第六电机,所述第六电机以凸起于所述第八座板表面的形式设置在所述第八座板上,所述第六电机远离所述第八座板的一端为所述第六电机的输出端。7.根据权利要求6所述的六轴机器人,其特征在于,所述第三夹角为直角;和/或所述第四夹角为直角。8.根据权利要求1至3中任一项所述的六轴机器人,其特征在于,所述第一电机的输出端朝上设置,所述转座位于所述第一电机的上方并且与所述第一电机的输出端相连,所述第一电机位于所述六轴机器人的底部用以支撑所述六轴机器人。9.根据权利要求1至3中任一项所述的六轴机器人,其特征在于,还包括:底座,用于支撑所述六轴机器人,所述第一电机安装在所述底座上,所述转座在所述第一电机的驱动下能相对于所述底座转动。10.根据权利要求1至3中任一项所述的六轴机器人,其特征在于,所述第一电机、所述第二电机、所述第三电机、所述第四电机、所述第五电机和第六电机上分别设置有连接器,所述连接器用于与外部电源或控制器的连接;或所述第一电机、所述第二电机、所述第三电机、所述第四电机、所述第五电机和第六电机分别设置有无线充电接收线圈,所述无线充电接收线圈用于与外部电源的无线充电发射线圈以非接触方式电连接;或所述转座、大臂、肩臂、小臂、腕体的内部分别设有用于供线缆穿过的线槽。
技术总结
本实用新型提供了一种六轴机器人,包括转座、大臂、肩臂、小臂、腕体、第一电机、第二电机、第三电机、第四电机、第五电机和第六电机,第一电机与转座相连;第二电机设在转座上,并与大臂相连;第三电机设在大臂上,并与肩臂相连;第四电机设在肩臂上,并与小臂相连;第五电机设在小臂上,并与腕体相连;第六电机设在腕体上;其中,第一电机、第二电机、第三电机、第四电机、第五电机和第六电机中至少一者为直驱电机,与传统的六轴机器人相比,本申请的六轴机器人的电机直接与相应的转座、大臂、肩臂、小臂或腕体连接,减少了减速器以及机械传动组件,因此结构更加简单,并使得降低自身重量。并使得降低自身重量。并使得降低自身重量。
技术研发人员:王辉 刘斌 李晓博 招绍坤 陈国 胡龙华
受保护的技术使用者:库卡机器人(广东)有限公司
技术研发日:2022.09.19
技术公布日:2022/12/20
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。