用于舷提网的动力浮棒及其动力配置方法
- 国知局
- 2024-07-12 12:59:14
本发明涉及一种舷提网的浮棒设计,尤其涉及一种用于舷提网的动力浮棒及其动力配置方法。
背景技术:
1、秋刀鱼是我国在北太平洋公海重要的商业捕捞种类之一。2015年,秋刀鱼被北太平洋渔业委员会(npfc)列为优先管理鱼种,目前,主要使用舷提网进行秋刀鱼捕捞,所述舷提网上设置有浮棒,该浮棒的作用是,使舷提网的漂浮在水面上,并使舷提网在水面上张开,以便于网罗目标。
2、目前的问题在于:现有的舷提网,其浮棒是不设置动力装置的,所以不能主动驱动舷提网张开,通常来说,需要依靠风力和海流的力量来使得网具展开,这样的作业方式不但作业效率低,而且还容易导致网具附着在船底,从而影响捕捞效率。
技术实现思路
1、本发明的目的之一在于提供一种用于舷提网的动力浮棒,该动力浮棒能够在水面上主动移位,从而便于控制舷提网在水面上的布置;本发明的目的之二在于提供一种动力浮棒的动力配置方法,采用该方法可以便捷地得到动力浮棒在不同工作要求下对应的推进器转速范围。
2、为了实现上述技术目的,本发明采用如下技术方案:
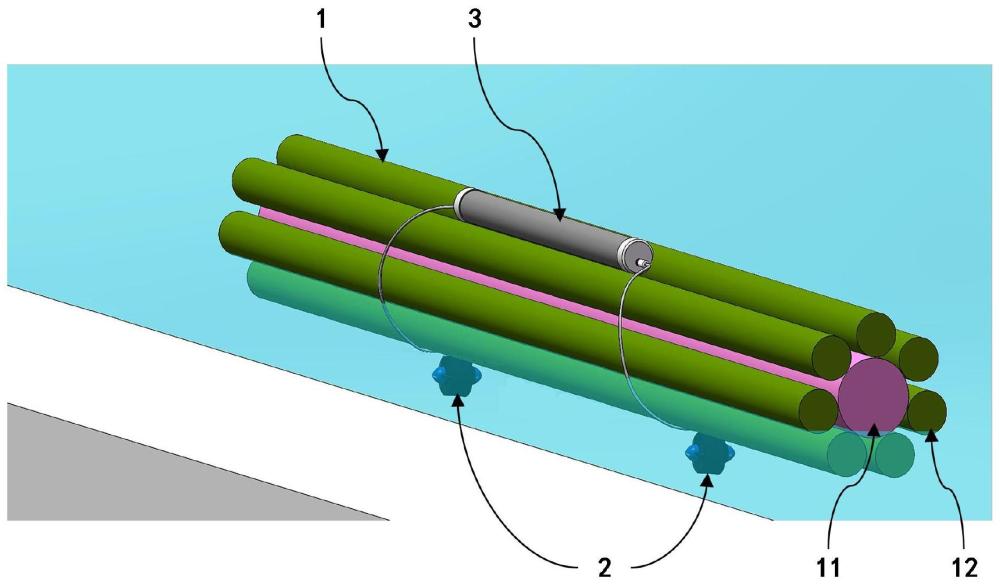
3、一种用于舷提网的动力浮棒,所述动力浮棒包括浮棒基体、推进器和电源;
4、所述推进器和电源均设置在浮棒基体上,当动力浮棒漂浮在水面上时,推进器处于水面以下;
5、所述推进器用于驱动动力浮棒在水面上行动,所述电源用于为推进器提供驱动电力。
6、进一步地,在浮棒基体上设置有遥控信号接收器,推进器的驱动动作受控于遥控信号接收器接收到的遥控信号;
7、针对所述遥控信号接收器配置有遥控器,该遥控器用于向遥控信号接收器发送控制推进器驱动动作的遥控信号。
8、进一步地,在浮棒基体上设置有封闭的容置腔体,所述遥控信号接收器和电源安置在容置腔体中;当动力浮棒漂浮在水面上时,容置腔体处于水面以上。
9、进一步地,所述动力浮棒满足基本作业需求,所述基本作业需求为动力浮棒的工作时长大于350分钟,动力高于20n;
10、在满足基本作业需求的前提下,动力浮棒上推进器的转速范围为1569rpm~1970rpm。
11、一种动力浮棒的动力配置方法,该动力配置方法包括:
12、s1,依照所述动力浮棒,制作动力浮棒样机;
13、s2,对动力浮棒样机进行实际测试,得出推进器动力数据和电源续航时间数据;
14、s3,对动力浮棒进行水动力模拟仿真分析,并对动力浮棒及其推进器进行受力监测,得出动力浮棒在推进器不同转速情况下产生的推进器动力数据;
15、s4,将步骤s2中实测得出的推进器动力数据与步骤s3中模拟分析得出的在推进器不同转速下产生的推进器动力数据进行结合分析,得出满足基本作业需求的转速范围。
16、进一步地,步骤s2包括:
17、预先准备一个拉力计以及一根牵动绳索,
18、所述拉力计固定设置在岸上,
19、所述牵动绳索的一端与拉力计的牵拉端相连,
20、所述牵动绳索的另一端固定连接在动力浮棒样机上水线位置处,
21、控制动力浮棒样机朝向远离岸边的方向行动,直至牵动绳索被拉直,
22、然后将推进器的转速调整至最大并保持,直至电源耗尽为止,
23、在此期间,持续地观测并记录推进器的动力输出状况和续航时间。
24、进一步地,步骤s3包括:
25、s31,使用solidworks软件对动力浮棒建模,并优化动力浮棒模型的特征,保留动力浮棒的主要结构;
26、s32,使用ansys spaceclaim软件对动力浮棒进行流体域建模,划分旋转域、静止域和体积影响范围;
27、s33,使用ansys fluent软件对模型进行网格划分,对模型赋予不同大小的网格尺寸;
28、s34,对动力浮棒进行水动力仿真模拟,包括湍流模型和多相流模型的选择,工作环境和边界条件设置,以及对动力浮棒阻力的监测;
29、s35,对动力浮棒的模拟结果进行进一步的分析,以得到推进器转速与动力浮棒动力的关系,最终得到动力浮棒在推进器不同转速下产生的推进器动力数据。
30、进一步地,步骤s33还包括:划分网格类型为poly-hexcore网格,最小网格尺寸固定为0.1mm,boi尺寸大小为30mm,边界层第一层高度为0.3mm,边界层层数为5。
31、进一步地,步骤s4包括:
32、s41,对动力浮棒的实验和模拟结果进行对比,验证结果的可靠性;
33、s42,对动力浮棒的模拟结果得到的推进器转速与动力关系和推进器转速与电源续航力关系进行进一步的分析,获得满足基本作业需求的转速范围;
34、s43,通过比值法,得到相同转速范围下,动力浮棒可以提供的动力大小以及续航时间。
35、进一步地,步骤s42还包括:对转速和模拟得到对应的动力值进行二次多项次函数拟合,获得动力浮棒动力与转速关系;将实验结果得到推进器转速与电源续航时间进行乘幂函数的拟合,并与模拟得到的转速与动力的关系进行整体分析,得出动力浮棒上推进器的转速范围。
36、本发明的动力浮棒,其具有推进器,该推进器能够驱动动力浮棒在水面上移位,作业人员可通过控制动力浮棒在水面上移动来控制舷提网在水面上的布置,从而大大提升了作业效率,同时也避免了“网具附着在船底,从而影响捕捞效率”的情况发生。
37、本发明的动力配置方法,其通过对实验数据对模拟结果进行验证,并通过cfd模拟进一步探究动力浮棒推进器转速与动力的关系,通过python或excel等软件拟合动力浮棒推进器转速与动力以及转速与电源续航力的关系,从而可以便捷地得到在不同工作要求下的对应转速范围,进而为动力浮棒的稳定应用提供了保障。
技术特征:1.一种用于舷提网的动力浮棒,其特征在于:所述动力浮棒包括浮棒基体(1)、推进器(2)和电源;
2.根据权利要求1所述用于舷提网的动力浮棒,其特征在于:在浮棒基体(1)上设置有遥控信号接收器,推进器(2)的驱动动作受控于遥控信号接收器接收到的遥控信号;
3.根据权利要求2所述用于舷提网的动力浮棒,其特征在于:在浮棒基体(1)上设置有封闭的容置腔体(3),所述遥控信号接收器和电源安置在容置腔体(3)中;当动力浮棒漂浮在水面上时,容置腔体(3)处于水面以上。
4.根据权利要求1所述用于舷提网的动力浮棒,其特征在于:所述动力浮棒满足基本作业需求,所述基本作业需求为动力浮棒的工作时长大于350分钟,动力高于20n;
5.一种动力浮棒的动力配置方法,所述动力浮棒为权利要求1至4中任一项所述的动力浮棒,其特征在于:所述动力配置方法包括:
6.根据权利要求5所述动力浮棒的动力配置方法,其特征在于:步骤s2包括:
7.根据权利要求5所述动力浮棒的动力配置方法,其特征在于:步骤s3包括:
8.根据权利要求7所述动力浮棒的动力配置方法,其特征在于:步骤s33还包括:划分网格类型为poly-hexcore网格,最小网格尺寸固定为0.1mm,boi尺寸大小为30mm,边界层第一层高度为0.3mm,边界层层数为5。
9.根据权利要求5所述动力浮棒的动力配置方法,其特征在于:步骤s4包括:
10.根据权利要求9所述动力浮棒的动力配置方法,其特征在于:步骤s42还包括:对转速和模拟得到对应的动力值进行二次多项次函数拟合,获得动力浮棒动力与转速关系;将实验结果得到推进器(2)转速与电源续航时间进行乘幂函数的拟合,并与模拟得到的转速与动力的关系进行整体分析,得出动力浮棒上推进器(2)的转速范围。
技术总结本发明公开了一种用于舷提网的动力浮棒及其动力配置方法。本发明的动力浮棒包括浮棒基体(1)、推进器(2)和电源;所述推进器用于驱动动力浮棒在水面上行动。本发明的动力配置方法包括:依照所述动力浮棒,制作动力浮棒样机;对动力浮棒样机进行实际测试,得出推进器动力数据和电源续航时间数据;对动力浮棒进行水动力模拟仿真分析;将实测得出的推进器动力数据与模拟分析得出的在推进器不同转速下产生的推进器动力数据进行结合分析,得出满足基本作业需求的转速范围。本发明的动力浮棒能够在水面上主动移位,从而便于控制舷提网在水面上的布置。技术研发人员:花传祥,梁万花,李非,陈雷雷,朱清澄受保护的技术使用者:上海海洋大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240614/102236.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。