一种智能化蔬菜无土栽培装置
- 国知局
- 2024-07-12 13:07:50
本发明涉及无土栽培,具体地讲,涉及一种智能化蔬菜无土栽培装置。
背景技术:
1、无土栽培初期蔬菜种子发芽前或刚发芽不能阳光直射种子发芽前或刚发芽不能阳光直射的原因主要有以下几点:
2、光照强度过强:对于某些种子来说,阳光直射过于刺激,可能导致种子过度干燥、发芽失败或发芽不良等问题。
3、控制温度:避光有助于控制种子的温度,这是种子萌发所需的重要环境因素。
4、控制水分蒸发:适当的避光可以有效控制种子的水分蒸发,增加种子的水分含量,这对于提高种子发芽率和生长速度非常重要。
5、保护娇嫩的幼苗:刚发芽的幼苗非常娇嫩,阳光直射可能会导致其受到伤害,影响后续的生长。
6、因此,在种子发芽前或刚发芽时,适当的避光是有必要的,这可以为种子创造一个合适的萌发环境,促进种子的正常发育,但是在种子发芽后生长的过程中需要进行适当的接受阳光,这样才能促进蔬菜叶子的生长,因此设计了一种智能化蔬菜无土栽培装置,以便控制作物的生长周期和生长高度,以便于及时采收和提高空间利用率,传统的无土栽培方式,通常需要人工调节作物的生长高度,或者使用固定的支架或绳索来限制作物的生长方向,这些方式不仅费时费力,而且容易造成作物的机械损伤或生理障碍,影响作物的品质和产量。
技术实现思路
1、本发明提供了一种智能化蔬菜无土栽培装置,通过设置转动拨绳组件,可以根据作物的生长情况,自动调节作物的生长高度,使作物的叶片能够充分接受阳光,同时为根部发育提供更大的空间,提高作物的光合效率和生长速度,增加作物的产量和品质。
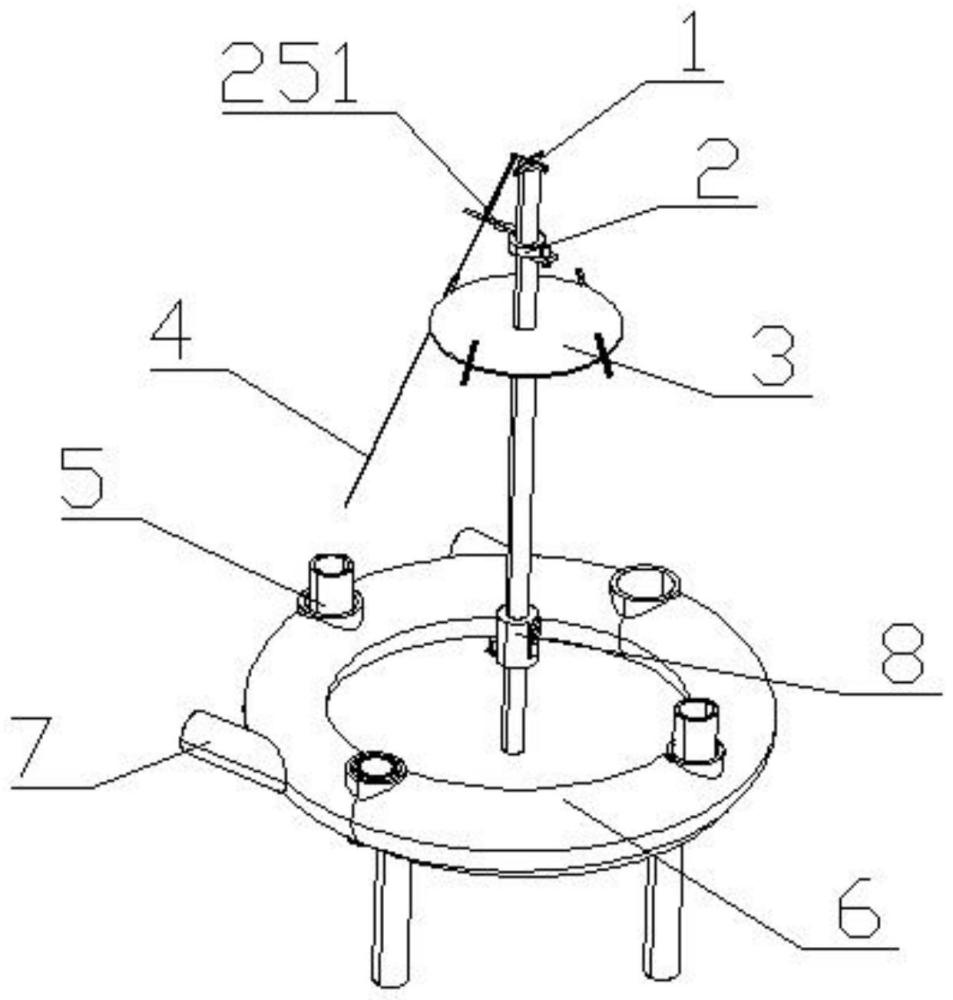
2、一种智能化蔬菜无土栽培装置,包括培养组件,其特征在于:转动拨绳组件,用于转动拨动连接绳,所述转动拨绳组件连接所述培养组件;
3、所述转动拨绳组件通过连接柱连接所述培养组件;
4、所述培养组件包括底座、遮光罩、蔬菜杯和蔬菜杯连接腔,所述遮光罩沿圆周方向固定在所述底座的上侧,所述蔬菜杯连接腔设置在所述遮光罩上,所述蔬菜杯连接腔内能放置所述蔬菜杯,所述连接柱的下端固定所述底座的上侧中心;
5、所述连接柱的中上部通过连接绳限位组件连接所述连接绳;
6、所述转动拨绳组件包括转动环、摩擦轮、连接块、电机一和拨动杆,所述转动环轴承连接所述连接柱的中上部,所述转动环的外周壁面贴合所述摩擦轮的外周面且与所述摩擦轮摩擦配合,所述摩擦轮轴承连接所述连接块,所述连接块固定所述连接柱,所述连接块的下侧固定所述电机一,所述电机一的输出轴固定连接所述摩擦轮,所述拨动杆固定电动推杆的伸缩杆,所述电动推杆的外壳固定连接所述所述转动环的上侧;
7、所述连接绳限位组件包括固定在所述连接柱的中上部的固定盘和若干个限位卡槽,所述限位卡槽沿所述固定盘的圆周方向均匀设置,所述限位卡槽固定所述固定盘,所述固定盘设置在所述转动拨绳组件的下侧,所述连接绳的上端固定连接绳支撑件,所述连接绳支撑件固定在所述连接柱的上端,每个所述连接绳分别卡入对应的所述限位卡槽内;
8、所述限位卡槽为弹性卡扣,所述连接绳在所述限位卡槽内卡紧的力度大于所述蔬菜杯的重力且小于所述转动拨绳组件拨动的力度。
9、作为本技术方案的进一步限定,所述遮光罩上的所述蔬菜杯连接腔和所述限位卡槽一一对应设置,每个所述连接绳的下端分别通过对称的分支连接绳固定连接所述蔬菜杯的上端设置的对称的耳扣。
10、作为本技术方案的进一步限定,所述遮光罩对称连接循环管路,所述循环管路固定连通所述遮光罩。
11、作为本技术方案的进一步限定,所述连接柱还连接有转动识别摄像机构,所述转动识别摄像机构包括图像采集模块、图像预处理模块、目标检测模块和目标处理模块。
12、作为本技术方案的进一步限定,其中,所述图像采集模块包括摄像头、第二转动环、第二摩擦轮、第二连接块和第二电机,所述第二转动环轴承连接所述连接柱的中下部,所述第二转动环的外周壁面贴合下部所述第二摩擦轮的外周面且与所述第二摩擦轮摩擦配合,所述第二摩擦轮轴承连接所述第二连接块,所述第二连接块固定所述连接柱,所述第二连接块的下侧固定所述第二电机,所述第二电机的输出轴固定连接所述第二摩擦轮,所述第二转动环的圆周壁面中上部固定连接所述摄像头。
13、作为本技术方案的进一步限定,所述图像采集模块使用所述摄像头拍摄蔬菜生长的图像,所述图像预处理模块对采集的图像进行预处理,该处理通过去噪和增强对比度的方式提高图像质量,所述目标检测模块采用基于yolo目标检测算法的计算机视觉技术。
14、作为本技术方案的进一步限定,所述yolo目标检测算法,用于从图像中检测出蔬菜的边界框、置信度和类别概率;所述目标处理模块使用非极大值抑制算法,对检测结果进行处理,去除重叠的边界框,保留最优的检测结果,以便于根据检测结果,判断蔬菜生长的最高点。
15、作为本技术方案的进一步限定,所述的yolo目标检测算法包括以下步骤:
16、将输入图像划分为sxs的网格,每个网格负责预测b个边界框、置信度以及类别概率;
17、使用卷积神经网络对输入图像进行特征提取,得到每个网格的特征向量;
18、将每个网格的特征向量输入到全连接层中,得到该网格所负责的b个边界框的位置、置信度和类别概率。
19、作为本技术方案的进一步限定,所述的非极大值抑制算法包括以下步骤:
20、设定边界框的置信度阈值;
21、根据置信度降序排列边界框列表;
22、选取置信度最高的边界框添加到输出列表,并将其从候选框列表中移除;
23、计算这个边界框与边界框列表中的所有其他边界框的iou值;
24、如果某个边界框与当前选出的边界框的iou值大于设定的阈值,则删除这个边界框;
25、重复上述过程,直到候边界列表为空。
26、作为本技术方案的进一步限定,所述置信度表示该边界框是否包含物体以及包含物体的准确性,置信度的计算公式如下: confidence=p(object)×iou,其中p(object)表示该候选框内存在物体的概率,iou表示该候选框与真实物体的边界框的交集与并集的比值, iou的计算公式如下:其中,areaofoverlap表示两个边界框的交集部分的面积,areaofunion表示两个边界框的并集部分的面积,所述类别概率表示该边界框内物体属于各个类别的概率,类别概率的计算公式如下:其中,p(classi|object)表示该候选框内物体属于第i个类别的概率,xi表示该候选框内物体属于第i个类别的得分, c表示总的类别数。 xi的值由yolo目标检测算法的全连接层输出得到,为了将xi的值转换为概率,使用了softmax函数,使得所有类别的概率之和为1。
27、与现有技术相比,本发明的优点和积极效果是:
28、本发明通过设置转动拨绳组件, 可以根据作物的生长情况, 自动调节作物的生长高度, 使作物的叶片能够充分接受阳光, 同时为根部发育提供更大的空间, 提高作物的光合效率和生长速度, 增加作物的产量和品质, 巧妙的设计了转动拨绳组件、连接绳限位组件等, 能够控制一个组件带动每个需要提升的蔬菜杯升高, 能够根据需要根据监控针对性的根据植物发育的程度进行调控。
29、本发明通过设置遮光罩,可以避免作物的根部受到光照的影响,防止根部的光合作用和呼吸作用,在植物培育初期可以实现完全遮光,减少营养液的消耗,延长营养液的使用寿命,节约水肥资源。
30、本发明通过设置转动识别摄像机构,可以利用计算机视觉技术,对作物的生长情况进行实时监测和分析,判断作物的生长高度和最高点,以便于控制转动拨绳组件的工作,实现作物的智能化控制,减少人工干预,提高管理效率。
31、本发明的结构简单,操作方便,适用于各种无土栽培的蔬菜,如番茄、黄瓜、辣椒、生菜等,可以在温室、植物工厂、屋顶等空间进行无土栽培,拓展了无土栽培的应用范围,促进了无土栽培技术的发展。
本文地址:https://www.jishuxx.com/zhuanli/20240614/102966.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表