一种气力夹持式末端执行器
- 国知局
- 2024-07-12 13:12:23
本发明涉及农业果蔬采摘机器人末端执行器的开发领域,特别是苹果采摘机器人的末端执行器的。
背景技术:
1、近年来,国内外的农业机器人发展比较迅速,采摘机器人的研究和开发也取得了不少成果。末端执行器作为农业果蔬采摘机器人的重要组成部分,国内外许多研究学者对末端执行器进行大量研究,但是由于果蔬柔嫩,一直无法实现实用化和商品化。在多数果蔬采摘作业中,均需通过末端执行器对果蔬实现摘取,因此避免夹持损伤成为实现末端执行器无损采摘的重点和关键。末端执行器对于农业的现代化发展具有重要意义。
技术实现思路
1、本发明提供一种气力夹持式末端执行器采取柔软膨胀气囊夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,对实现果实采摘机器人的实用化和商品化大有裨益。
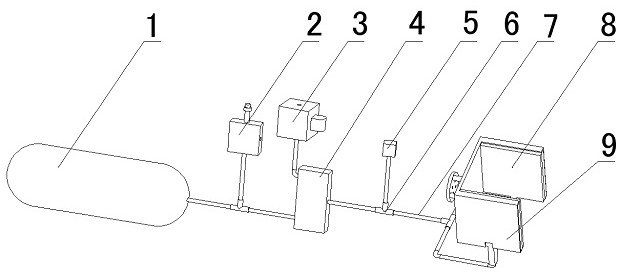
2、为了解决上述技术问题,本发明提供一种气力夹持式末端执行器,包括末端执行器和气动系统。末端执行器主要包括壳体和膨胀气囊,膨胀气囊的工作表面与对应非工作表面中间部位通过限制柱连接;气动系统主要包括气泵、安全阀、真空电磁阀、两位三通电磁阀、气压传感器、三通气动接头和气管,气泵、两位三通电磁阀和膨胀气囊通过气管连接,安全阀和气压传感器通过三通气动接头连接到主路上,真空电磁阀通过气管连接到两位三通电磁阀,气泵提供气动力,安全阀对管路进行压力保护,采用两位三通电磁阀可实现膨胀气囊的进气,完成苹果夹持,采用真空电磁阀实现膨胀气囊的稳压和排气,完成苹果的采摘和松开。
3、作为本发明的一种优选技术方案,所述两位三通电磁阀通过更换不同的控制位置状态,进而实现膨胀气囊的进气,完成对苹果的夹持。
4、作为本发明的一种优选技术方案,所述真空电磁阀通过更换不同的控制状态,实现膨胀气囊的稳压和排气,完成对苹果的采摘和松开。
5、作为本发明的一种优选技术方案,所述壳体的末端连接部位有均匀分布的四个螺栓孔,可以连接到各种中小型球形果实采摘机器人的机械臂上,提高通用性。
6、作为本发明的一种优选技术方案,所述膨胀气囊属于柔性材料,不仅可以膨胀夹持苹果,而且自身柔性可以更好地保护苹果,避免刚性夹持苹果,导致损伤苹果。
7、作为本发明的一种优选技术方案,所述膨胀气囊内部设有限制柱,用于连接膨胀气囊的工作表面与对应非工作表面,可以使膨胀气囊膨胀时中间凹两边凸,使夹持平面在夹持时由点接触变成面接触,增大与苹果表面接触面积,更好地夹持苹果。
8、作为本发明的一种优选技术方案,所述膨胀气囊设计成甲字形,为了增大膨胀气囊与气管的接触面积,并且膨胀气囊的进气孔与气管采用过盈配合,防止膨胀气囊在膨胀时泄气。
9、本发明所达到的有益效果是:该末端执行器采取柔软膨胀气囊夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,对实现果实采摘机器人的实用化和商品化大有裨益。
技术特征:1.一种气力夹持式末端执行器,包括末端执行器和气动系统,末端执行器主要包括壳体(9)和膨胀气囊(8),膨胀气囊(8)的工作表面与对应非工作表面中间部位通过限制柱(10)连接;气动系统主要包括气泵(1)、安全阀(2)、真空电磁阀(3)、两位三通电磁阀(4)、气压传感器(5)、三通气动接头(6)和气管(7),气泵(1)、两位三通电磁阀(4)和膨胀气囊(8)通过气管(7)连接,安全阀(2)和气压传感器(3)通过三通气动接头(6)连接到主路上,真空电磁阀(3)通过气管(7)连接到两位三通电磁阀(4),气泵(1)提供气动力,安全阀(2)对管路进行压力保护,采用两位三通电磁阀(4)可实现膨胀气囊(8)的进气,完成苹果夹持,采用真空电磁阀(3)实现膨胀气囊(8)的稳压和排气,完成苹果的采摘和松开,本末端执行器采取柔软膨胀气囊(8)夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,对实现果实采摘机器人的实用化和商品化大有裨益。
2.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的两位三通电磁阀(4)通过更换不同的控制位置状态,进而实现膨胀气囊(8)的进气。
3.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的真空电磁阀(3)通过更换不同的控制状态,实现膨胀气囊(8)的稳压和排气。
4.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的壳体(9)的末端连接部位有均匀分布的四个螺栓孔,可以连接到各种中小型球形果实采摘机器人的机械臂上,提高通用性。
5.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的膨胀气囊(8)属于柔性材料,不仅可以膨胀夹持苹果,而且自身柔性可以更好地保护苹果,避免刚性夹持苹果,导致损伤苹果。
6.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的膨胀气囊(8)内部设有限制柱(10),用于连接膨胀气囊(8)的工作表面与对应非工作表面,可以使膨胀气囊(8)膨胀时中间凹两边凸,使夹持平面在夹持时由点接触变成面接触,增大与苹果表面接触面积,更好地夹持苹果。
7.根据权利要求1所述的一种气力夹持式末端执行器,其特征在于,所述的膨胀气囊(8)设计成甲字形,为了增大膨胀气囊(8)与气管(7)的接触面积,并且膨胀气囊(8)的进气孔与气管(7)采用过盈配合,防止膨胀气囊(8)在膨胀时泄气。
技术总结本发明公开了一种气力夹持式末端执行器,包括末端执行器和气动系统。末端执行器主要包括壳体和膨胀气囊,膨胀气囊的工作表面与对应非工作表面中间部位通过限制柱连接;气动系统主要包括气泵、安全阀、真空电磁阀、两位三通电磁阀、气压传感器、三通气动接头和气管,气泵、两位三通电磁阀和膨胀气囊通过气管连接,安全阀和气压传感器通过三通气动接头连接到主路上,真空电磁阀通过气管连接到两位三通电磁阀,气泵提供气动力,安全阀对管路进行压力保护,采用两位三通电磁阀可实现膨胀气囊的进气,完成苹果夹持,采用真空电磁阀实现膨胀气囊的稳压和排气,完成苹果的采摘和松开。本末端执行器采取柔软膨胀气囊夹持,可防止采摘时苹果的损伤,采用气动方式,速度快、工作介质无污染,对实现果实采摘机器人的实用化和商品化大有裨益。技术研发人员:陈军,陈超,胡广锐,姜彦武,周建国,骆通运,李浦航,赵开元受保护的技术使用者:西北农林科技大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240614/103595.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表