一种智能高效设施番茄采摘机器人
- 国知局
- 2024-07-12 13:13:10
本申请涉及现代农业装备,尤其涉及一种智能高效设施番茄采摘机器人。
背景技术:
1、番茄的种植生产具有劳动密集的特点,从播种到定植、生长管理再到采摘收获时期都需要投入大量劳动力,采摘所需成本占总成本的 30%以上。由于番茄开花结果的时间不一致,且同一时间果实成熟度相差较大,一次性的机械收获较难使番茄的收获品质达到上市标准。因而,在绝大多数规模化种植中,机械化作业水平较低,无现有适用的机械可用,这导致依然需要依赖人力劳动来完成番茄的采摘和分装,需要投入大量成本。
2、本发明能够将农业采摘机器人进一步推广应用,推动采摘机器人在蔬菜、无人导航、智能农业装备等应用场景广泛应用。
技术实现思路
1、本申请的目的在于提供一种智能高效设施番茄采摘机器人,可以实现多臂协同的高效运动和高效低损的机械采收,以解决现有技术中番茄机械化采摘的作业强度大、收获作业耗时长等缺陷。
2、为解决上述技术问题,本申请是采用下述技术方案实现的:
3、一种智能高效设施番茄采摘机器人,包括安装架,所述安装架上固定有同步带滑动模组,所述同步带滑动模组上连接有末端采摘机构,同步带滑动模组驱动所述末端采摘机构在空间内移动,所述末端采摘机构用于对采摘物进行吸附固定并旋转。
4、本申请进一步的方案,还包括底盘连接板,所述安装架固定于所述底盘连接板,所述安装架两侧的底盘连接板上分别固定有电气柜、气泵,所述电气柜信号连接所述同步带滑动模组和末端采摘机构,所述气泵管路连接所述末端采摘机构的吸附能源。
5、本申请进一步的方案,所述同步带滑动模组包括十字连接的x轴滑动模组和y轴滑动模组;
6、所述x轴滑动模组转动连接于所述安装架上,且所述安装架一侧固定有第一电机,第一电机输出轴穿过所述安装架连接所述x轴滑动模组,所述末端采摘机构转动安装在所述y轴滑动模组上,所述y轴滑动模组上设有第二电机,第二电机输出轴连接所述末端采摘机构。
7、更进一步的方案,所述x轴滑动模组包括两个相对的x轴主动轮组件,所述x轴主动轮组件转动连接所述安装架,两个x轴主动轮组件之间对称安装有x轴滑轨,所述x轴滑轨上滑动安装有x轴滑台,两个所述x轴主动轮组件之间传送连接有同步齿轮带,同步齿轮带与所述x轴滑台固接,任意一个所述x轴主动轮组件上安装有x轴电机,x轴电机驱动所述同步齿轮带传动,所述y轴滑动模组固接所述x轴滑台上。
8、更进一步的方案,所述x轴滑轨底部设有地脚,x轴主动轮组件之间固定有滑动模组架,所述地脚和滑动模组架固定,所述滑动模组架两端的法兰转动连接有h形连接件,h形连接件固接所述安装架。
9、更进一步的方案,所述x轴滑动模组和所述y轴滑动模组结构相同,所述y轴滑动模组的y轴滑台通过t形滑台连接板固定在所述x轴滑台上。
10、更进一步的方案,所述末端采摘机构包括采摘末端壳体、真空发生器、气动马达、末端输出轴、多层吸盘和真空吸盘支架;
11、所述采摘末端壳体固接所述第二电机,所述末端齿轮输出轴外轴承嵌于所述采摘末端壳体侧壁上,所述末端输出轴套装在所述末端齿轮输出轴外轴承,所述多层吸盘置于所述采摘末端壳体外并通过真空吸盘支架连接所述末端齿轮输出轴外轴承,所述真空发生器固定在采摘末端壳体内并管路连接末端齿轮输出轴内轴承,所述采摘末端壳体外还固定有深度相机,所述采摘末端壳体内还安装有驱动体,所述驱动体工作,以使所述多层吸盘转动。
12、更进一步的方案,所述驱动体包括固定于所述采摘末端壳体内的气动马达,气动马达输出端固定有主动齿轮,所述末端输出轴外固定有从动齿轮,从动齿轮与主动齿轮啮合。
13、本申请进一步的方案,所述同步带滑动模组为多个,且多个所述同步带滑动模组同平面设置于所述安装架。
14、本申请进一步的方案,还包括移动设备,所述安装架固定在所述移动设备上。
15、与现有技术相比,本申请所达到的有益效果:
16、本申请中设计将末端采摘机构安装在同步带滑动模组上,同步带滑动模组带动末端采摘机构在空间中自由移动,可满足方位番茄的采摘工作,且末端采摘机构使用吸附采摘可以最大程度的保证番茄的表皮完整度,实现高效低损的机械采收,且解决现有吸附式采摘末端旋转扭断果梗采摘果实气管缠绕问题,装置相对于现有六自由度采摘机械臂或其他冗余机械臂相比成本低,容易控制,采摘效率更高。
17、此外同步带滑动模组使用十字布置的x轴滑动模组和y轴滑动模组组装,配合第一电机和第二电机,使得装置具有较高的移动精度,解决了直角坐标机械臂要体积较大,动作范围有限和灵活性有限缺点,但具有直角坐标机械臂位置精度高、控制简单、无耦合限制等特点。
18、装置的机械臂协作规划,采摘效率更高,由末端增设旋转自由度解决番茄果实不规则位姿造成的采摘困难问题,本发明采摘范围更大,适应多种吊蔓式番茄的采摘作业。
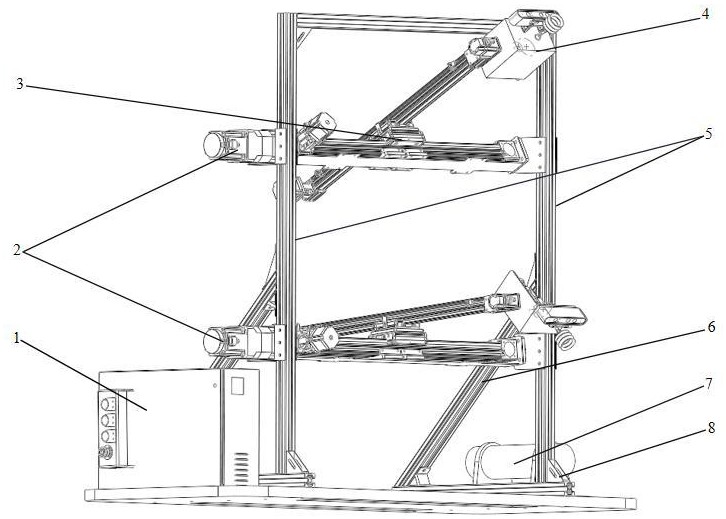
技术特征:1.一种智能高效设施番茄采摘机器人,其特征在于,包括安装架(5),所述安装架(5)上固定有同步带滑动模组(3),所述同步带滑动模组(3)上连接有末端采摘机构(4),同步带滑动模组(3)驱动所述末端采摘机构(4)在空间内移动,所述末端采摘机构(4)用于对采摘物进行吸附固定并旋转。
2.根据权利要求1所述的智能高效设施番茄采摘机器人,其特征在于,还包括底盘连接板(9),所述安装架(5)固定于所述底盘连接板(9),所述安装架(5)两侧的底盘连接板(9)上分别固定有电气柜(1)、气泵(7),所述电气柜(1)信号连接所述同步带滑动模组(3)和末端采摘机构(4),所述气泵(7)管路连接末端采摘机构(4)。
3.根据权利要求1所述的智能高效设施番茄采摘机器人,其特征在于,所述同步带滑动模组(3)包括十字连接的x轴滑动模组和y轴滑动模组;
4.根据权利要求3所述的智能高效设施番茄采摘机器人,其特征在于,所述x轴滑动模组包括两个相对设置的x轴主动轮组件(309),所述x轴主动轮组件(309)转动连接所述安装架(1),两个x轴主动轮组件(309)之间对称安装有x轴滑轨(306),所述x轴滑轨(306)上滑动安装有x轴滑台(302),两个所述x轴主动轮组件(309)之间传送连接有同步齿轮带(301),同步齿轮带(301)所述x轴滑台(302)固接,任意一个所述x轴主动轮组件(309)上安装有x轴电机(307),x轴电机(307)驱动所述同步齿轮带(301)传动,所述y轴滑动模组固接所述x轴滑台(302)上。
5.根据权利要求4所述的智能高效设施番茄采摘机器人,其特征在于,所述x轴滑轨(306)底部设有地脚(15),x轴主动轮组件(309)之间固定有滑动模组架(19),所述地脚(15)和滑动模组架(19)固定,所述滑动模组架(19)两端的法兰(14)转动连接有h形连接件(18),h形连接件(18)固接所述安装架(1)。
6.根据权利要求4所述的智能高效设施番茄采摘机器人,其特征在于,所述x轴滑动模组和所述y轴滑动模组结构相同,所述y轴滑动模组的y轴滑台(304)通过t形滑台连接板(303)固定在所述x轴滑台(302)上。
7.根据权利要求3所述的智能高效设施番茄采摘机器人,其特征在于,所述末端采摘机构(4)包括采摘末端壳体(409)、真空发生器(401)、末端输出轴(405)、多层吸盘(414)、端齿轮输出轴外轴承(412)和真空吸盘支架(413);
8.根据权利要求7所述的智能高效设施番茄采摘机器人,其特征在于,所述驱动体包括固定于所述采摘末端壳体(409)内的气动马达(407),气动马达(407)输出端固定有主动齿轮(406),所述末端输出轴(405)外固定有从动齿轮(402),从动齿轮(402)与主动齿轮(406)啮合。
9.根据权利要求1所述的智能高效设施番茄采摘机器人,其特征在于,所述同步带滑动模组(3)为多个,且多个所述同步带滑动模组(3)同平面设置于所述安装架(5)。
10.根据权利要求1至9任一项所述的智能高效设施番茄采摘机器人,其特征在于,还包括移动设备,所述安装架(5)固定在所述移动设备上。
技术总结本申请公开了现代农业装备领域中的一种智能高效设施番茄采摘机器人,包括安装架,所述安装架上固定有同步带滑动模组,所述同步带滑动模组上连接有末端采摘机构,同步带滑动模组驱动所述末端采摘机构在空间内移动,所述末端采摘机构用于对采摘物进行吸附固定并旋转;本申请中设计将末端采摘机构安装在同步带滑动模组上,同步带滑动模组带动末端采摘机构在空间中自由移动,可满足方位番茄的采摘工作,且末端采摘机构使用吸附采摘最大程度的保证番茄的表皮完整度,实现高效低损的机械采收,装置相对于现有六自由度采摘机械臂或其他冗余机械臂相比成本低,容易控制,采摘效率更高。技术研发人员:章永年,赵杰,施印炎,汪小旵,郑恩来,肖茂华受保护的技术使用者:南京农业大学技术研发日:技术公布日:2024/6/11本文地址:https://www.jishuxx.com/zhuanli/20240614/103688.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表