-
一种爬壁机器人及其控制方法与流程
本申请涉及风电塔筒,尤其涉及一种爬壁机器人及其控制方法。背景技术:1、风电塔筒在使用过程中,可能受到腐蚀导致壁厚降低,并且风电塔筒通常由多个板材焊接拼装形成,在焊接处的焊缝质量关系着风机能否安全运行。......
-
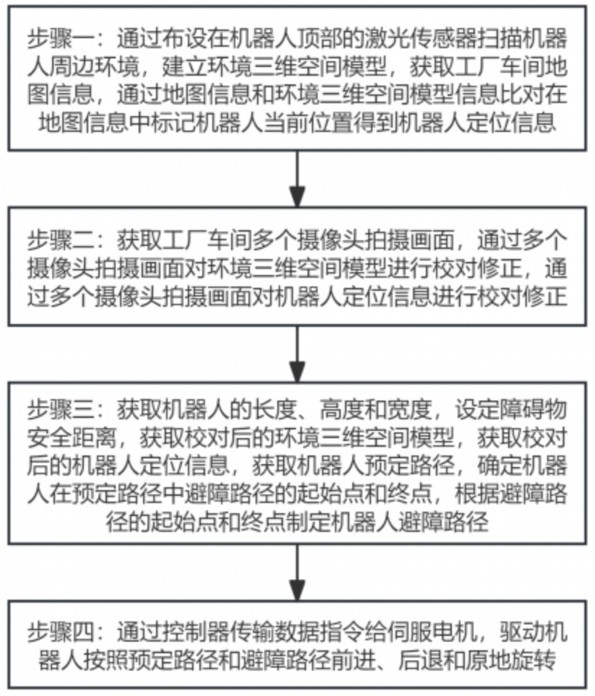
一种基于机器人控制器的控制系统及其控制方法与流程
本发明涉及机器人控制器,具体为一种基于机器人控制器的控制系统及其控制方法。背景技术:1、随着工业自动化的不断推进,大多生产线实现自动化,各式工业机器人被运用到不同的产线以适用不同的应用场景,从而节省了......
-
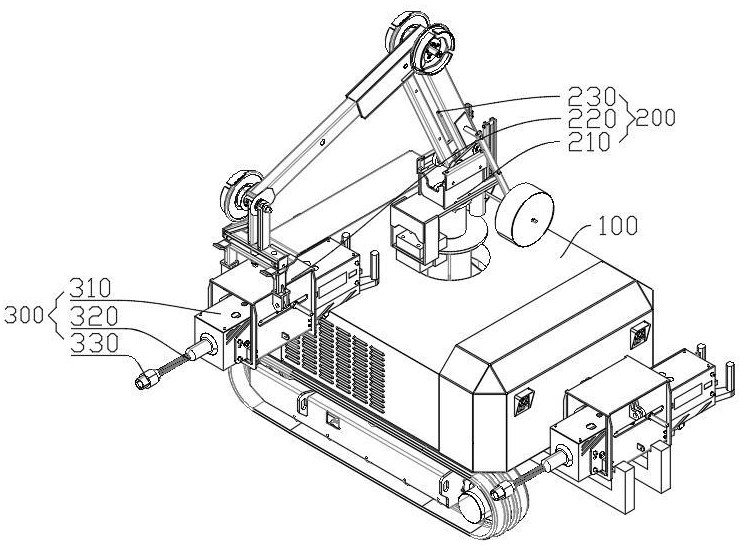
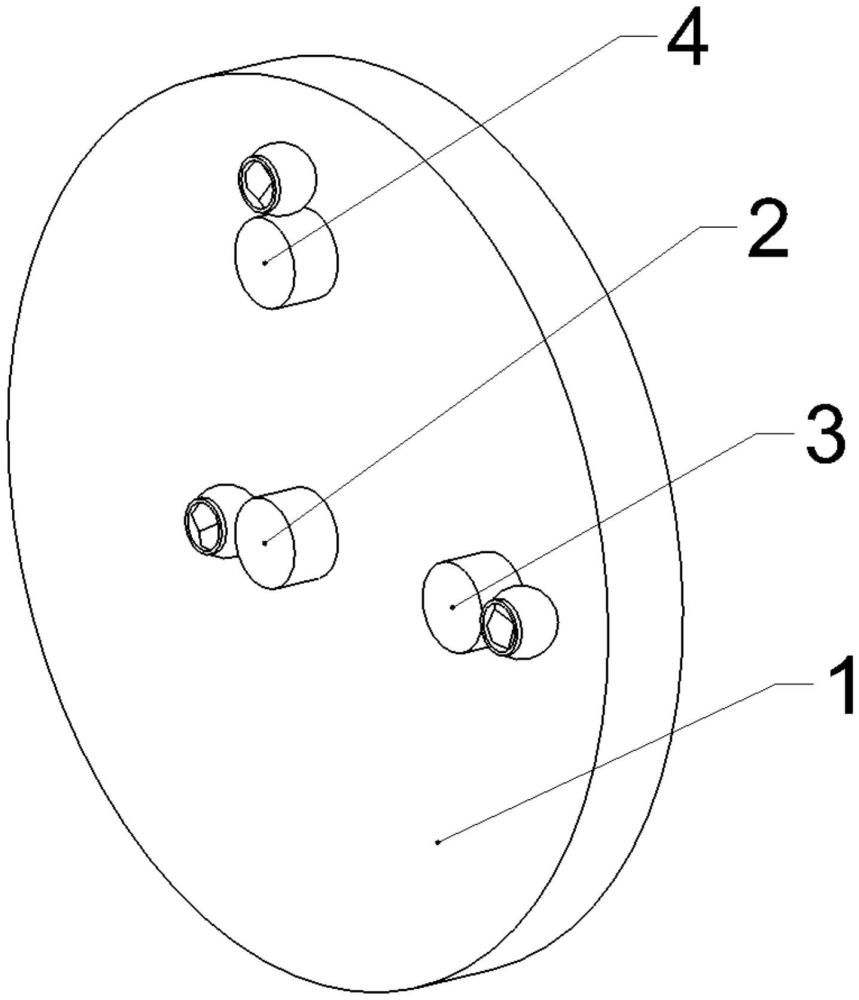
一种自动拆螺栓机器人的制作方法
本发明涉及拆螺栓,尤其涉及一种自动拆螺栓机器人。背景技术:1、衬板能够对球磨机内壁进行保护,降低磨球对球磨机本体的磨损,衬板在工作一定时间后需要拆卸更换,球磨机衬板是通过螺栓安装于球磨机表面的。2、球......
-
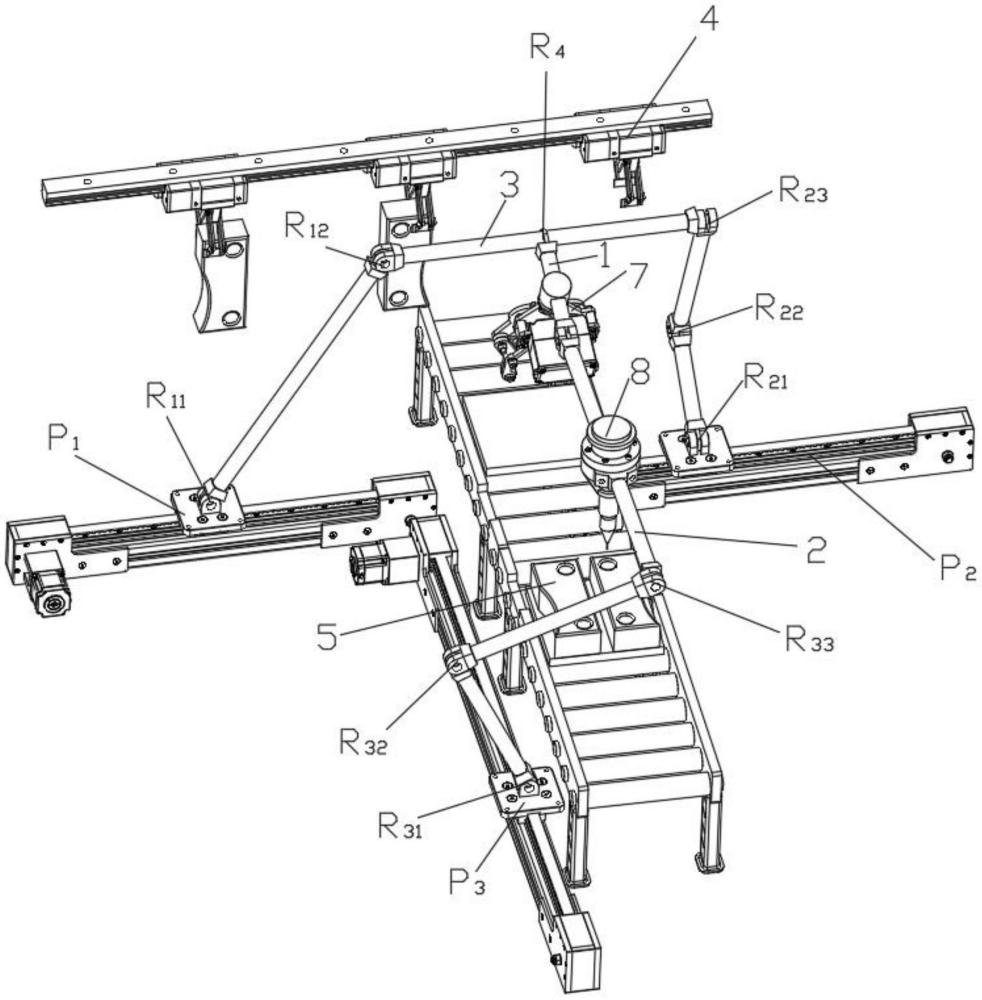
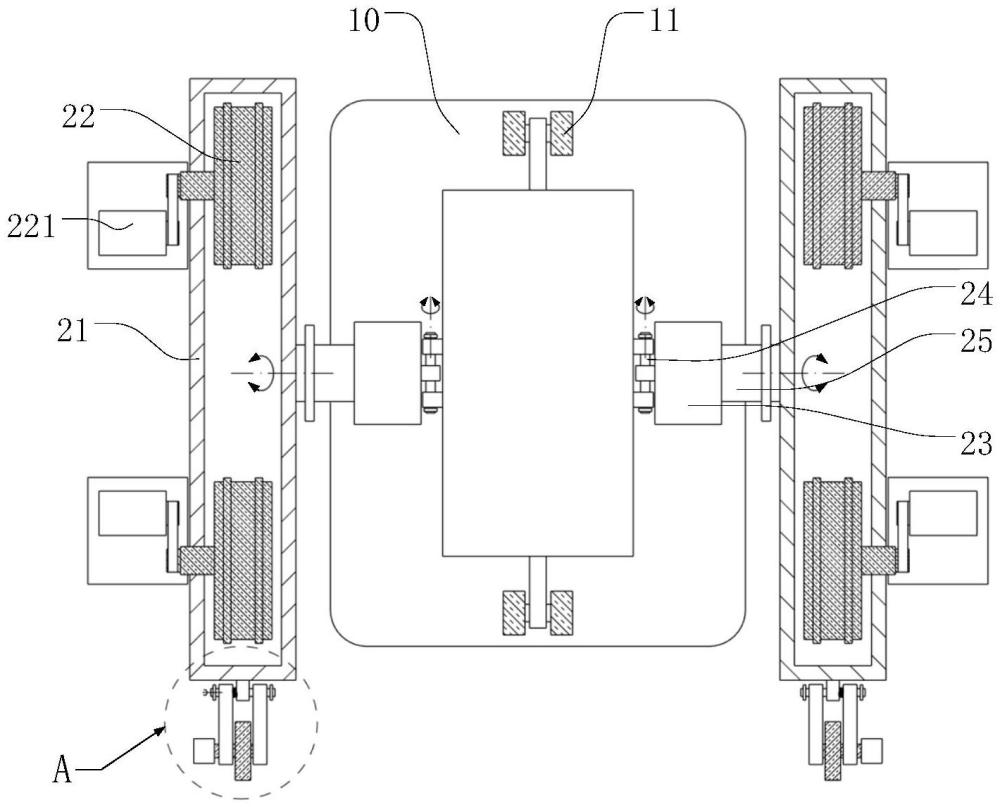
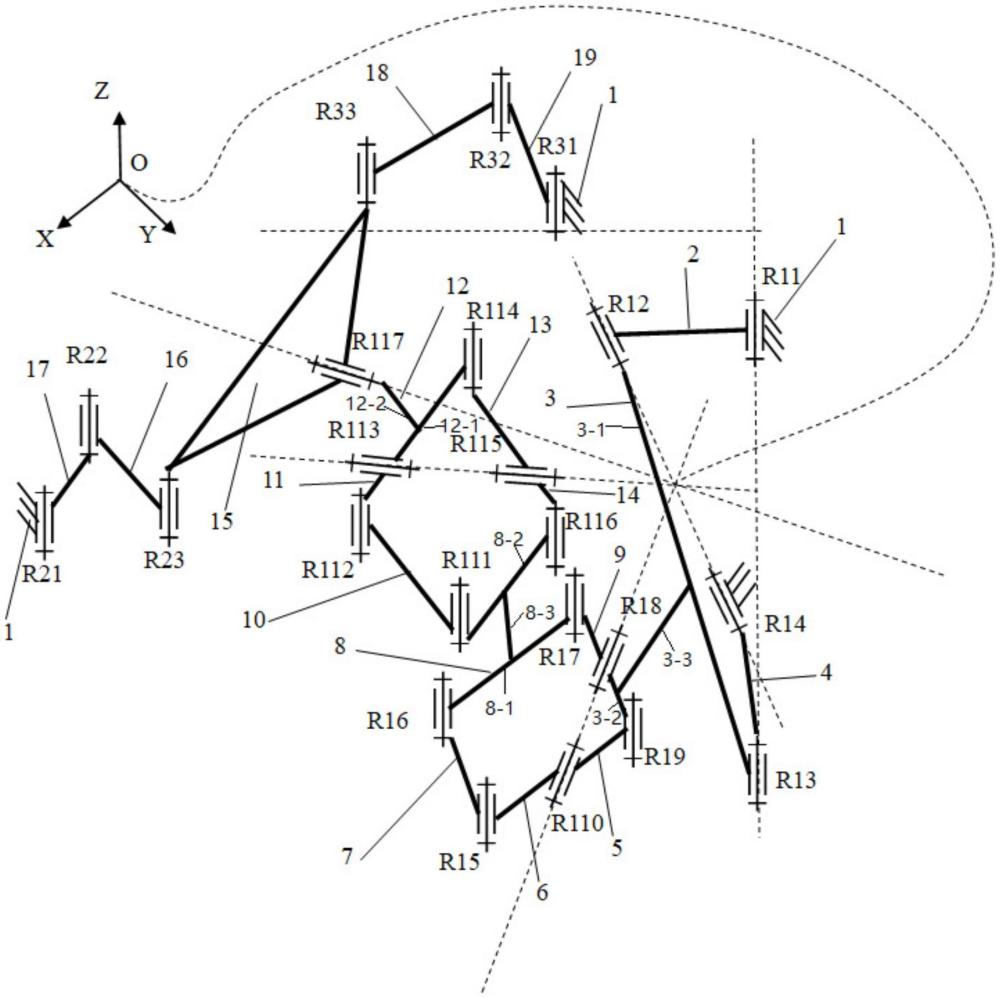
一种三自由度轮换输出模式焊接作业的机器人
本发明涉及并联机器机构,具体涉及一种三自由度轮换输出模式焊接作业的机器人。背景技术:1、在焊接作业生产线上,想要实现对物料的抓取和焊接作业,通常的做法是配备一个抓取机器人和焊接机器人,例如中国发明专利......
-
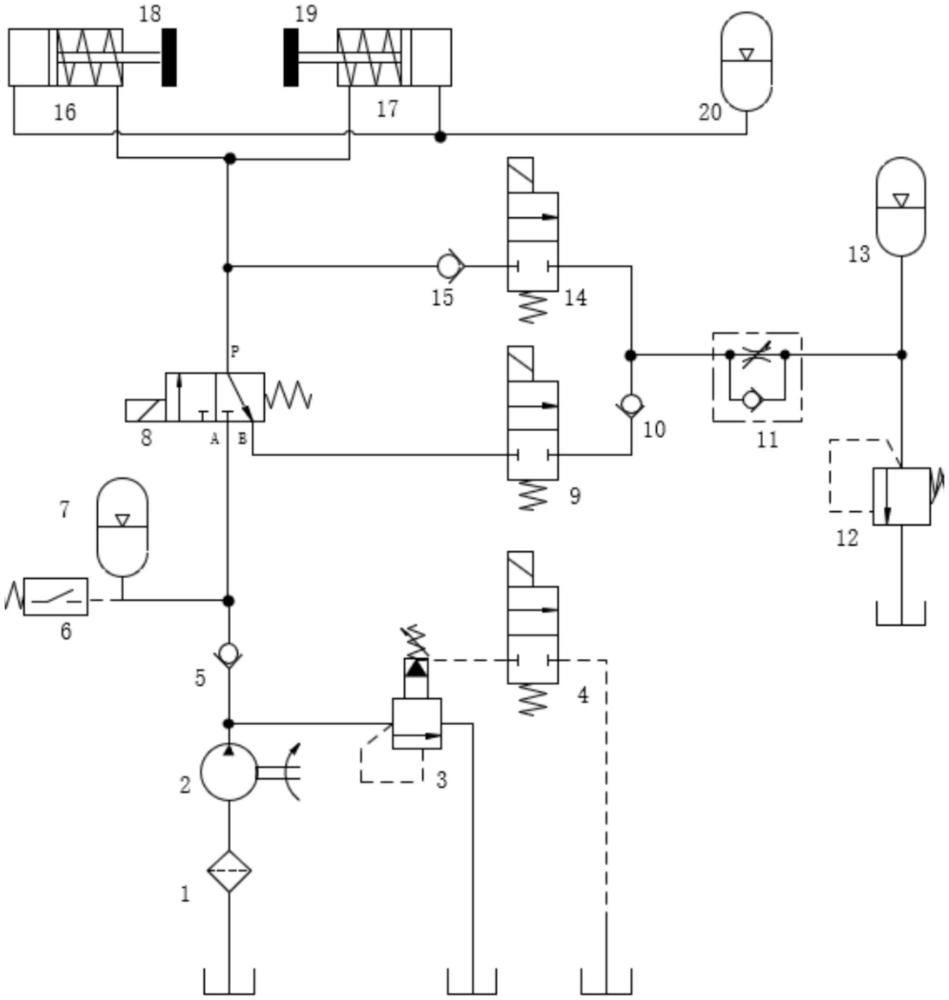
一种煤矿辅助运输转载机器人的制动能量回收液压系统
本发明属于能量回收,尤其涉及一种煤矿辅助运输转载机器人的制动能量回收液压系统。背景技术:1、煤矿运输辅助转载机器人在煤矿运输中有着广泛的应用,为了保证运输过程中人员以及货物的安全性,其在制动时的响应速......
-
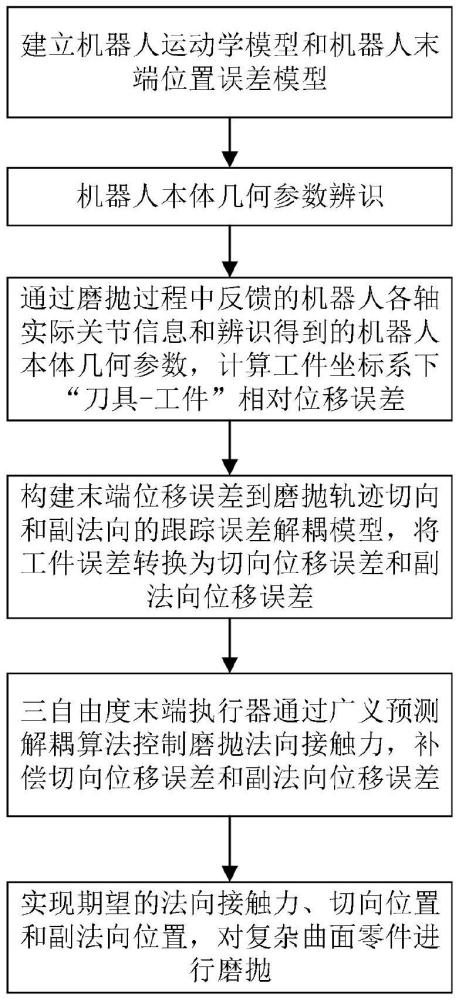
一种“机器人-末端执行器”双级协同的高精度力位控制方法、系统及终端
本发明属于但不限于刨磨加工,尤其涉及一种“机器人-末端执行器”双级协同的高精度力位控制方法、系统及终端。背景技术:1、复杂曲面零件在航空航天、汽车、船舶等领域的应用日益广泛,为保证零件表面的轮廓度和粗......
-
具有锁定模式的平面运动并联机器人
本发明涉及机器人,具体涉及具有锁定模式的平面运动并联机器人。背景技术:1、平面运动并联机器人在对位、分拣、运动仿真装备领域有广泛应用。并联机器人具有刚度高、动态性能好的特点。多模式并联机器人能根据工业......
-
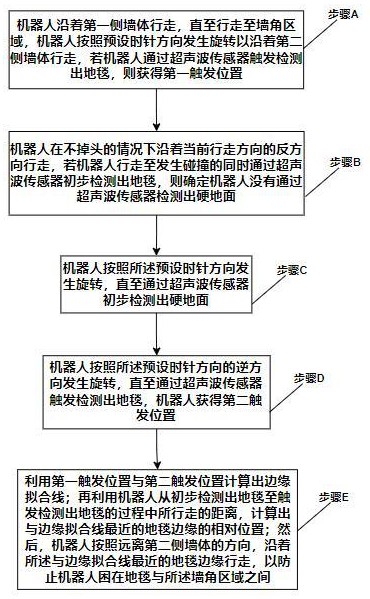
基于地毯检测的机器人脱困方法与流程
本技术涉及地毯识别的,具体涉及基于地毯检测的机器人脱困方法。背景技术:1、在家居环境中,除了铺设于客厅的大地毯外,也在入户门的地垫、厨房、浴室门口处设置的防滑地毯。这些防滑地毯通常放在门口,周围竖立起......
-
连续体柔性机器人的制作方法
本发明涉及机器人,具体涉及一种连续体柔性机器人。背景技术:1、在地震灾后救援中,救援人员需要对可能存在幸存者的区域进行探测,但传统机器设备往往难以对狭小的震后废墟空间进行勘察,传统的刚性连杆机械手往往......
-
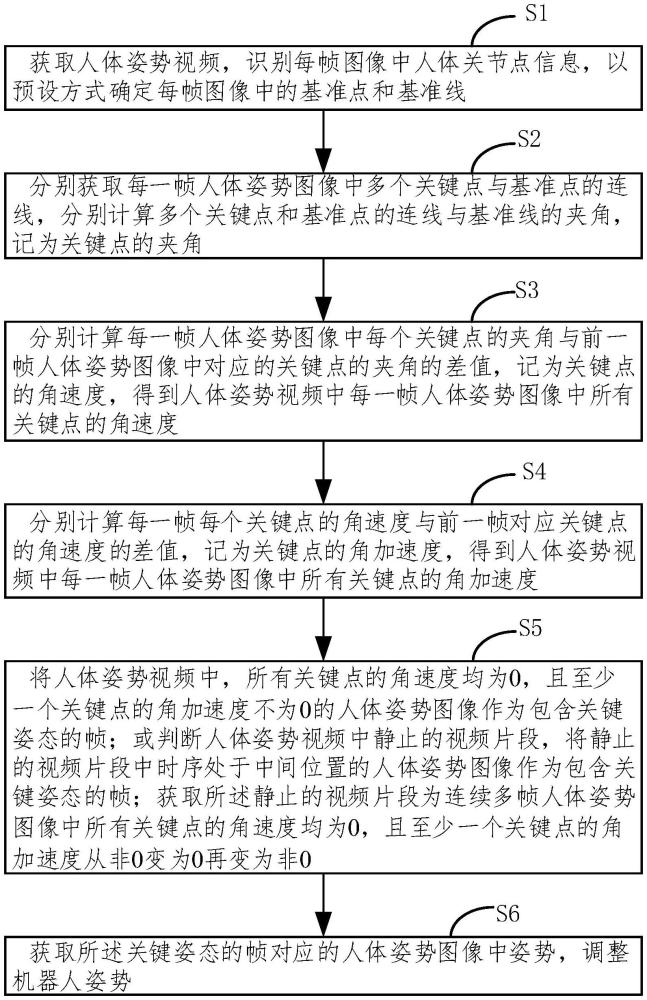
一种低计算量的机器人模拟人体动作的方法和系统与流程
本申请涉及机器人,特别是涉及一种低计算量的机器人模拟人体动作的方法和系统。背景技术:1、动作模仿是机器人一项重要的与人互动的功能。在一些领域中,机器人模仿的是一系列独立的、非连续的姿势或动作,如在博物......
-
一种机器人视觉系统空间位姿导引精度测量装置及方法与流程
本发明涉及机器人导引,具体涉及一种机器人视觉系统空间位姿导引精度测量装置及方法。背景技术:1、机器人是航空、航天、国防、机械制造等工业技术领域必需的基础生产设备。机器人系统的集成与运用迈向了智能化方向......
-
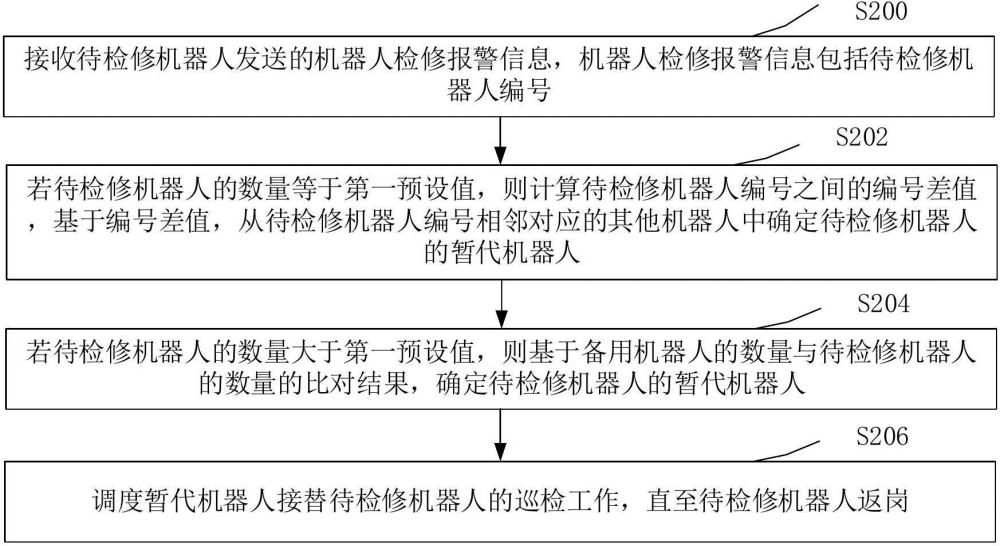
机器人调度方法、装置、计算机设备和可读存储介质与流程
本申请涉及计算机,特别是涉及一种机器人调度方法、装置、计算机设备和可读存储介质。背景技术:1、随着计算机技术的发展,机器人开始应用于越来越多的领域,比如机器人应用于电网巡检领域。当多台机器人在应用场景......
-
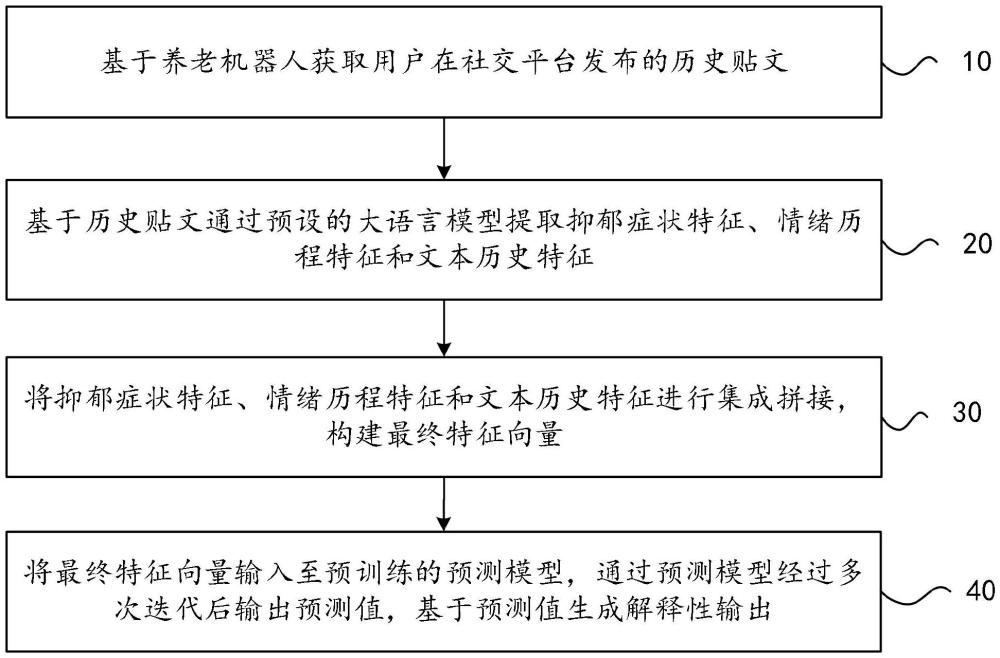
一种基于养老机器人的健康监测方法及其养老机器人与流程
本发明涉人工智能,尤其涉及一种基于养老机器人的健康监测方法及其养老机器人。背景技术:1、随着社会老龄化,老人的数量越来越多,然而年轻人陪伴老人的时间越来越少,因此,随时时间的推移,老年人的心理可能会出......
-
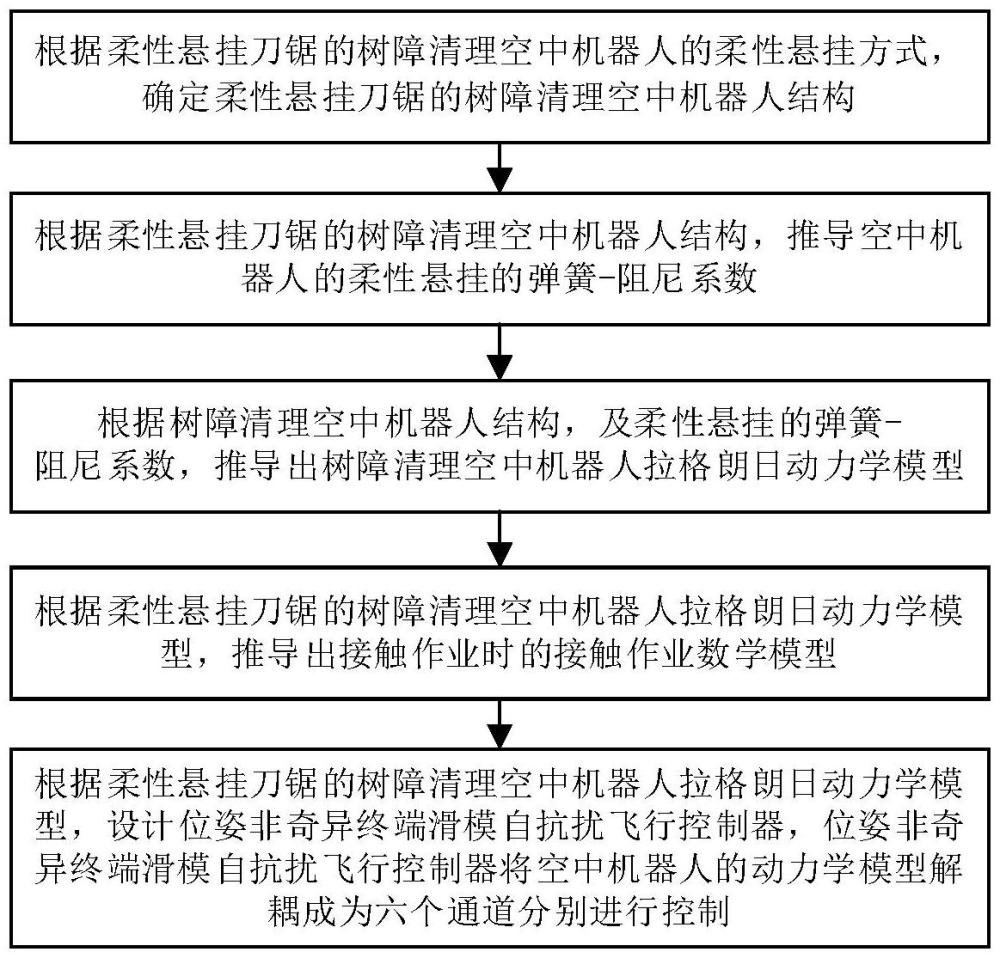
一种柔性悬挂刀锯的树障清理空中机器人飞行控制方法及装置
本发明涉及航空飞行器与机器人控制方法及装置,特别是涉及柔性悬挂刀锯的树障清理空中机器人飞行控制方法及装置。背景技术:1、输电线路是电力网络的重要组成部分,常常受到天气、植物、动物和人为等因素影响。其中......
-
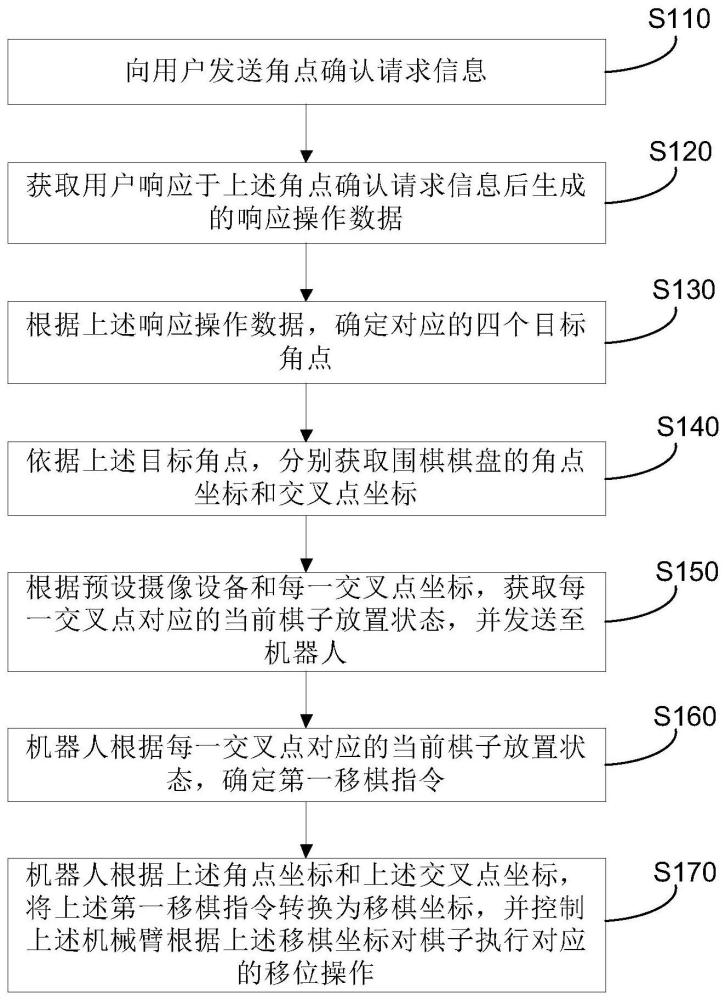
围棋机器人交互方法及系统与流程
本发明涉及计算机软件,具体地说,涉及一种围棋机器人交互方法及系统。背景技术:1、围棋起源于中国,是一种策略型两人棋类游戏。目前,围棋机器人已经成为一个越来越受欢迎的市场。从围棋大师的水平到初学者,围棋......
-
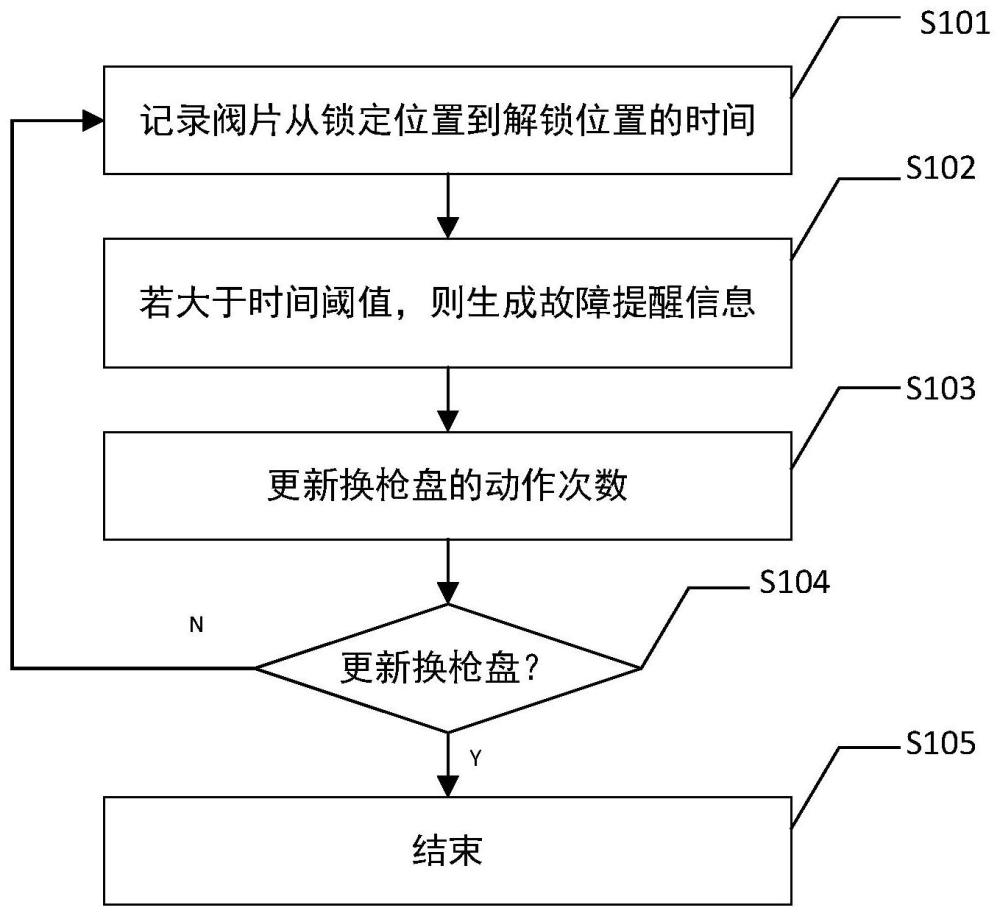
机器人工具切换系统及自检方法与流程
本发明涉及自动化领域,更具体地,涉及一种用于机器人工具切换系统的自检方法以及相应的系统。背景技术:1、在当前的汽车生产过程中,焊接是一个重要的步骤。在自动化的焊装车间中,如果使用到两把焊枪,焊接机器人......
-
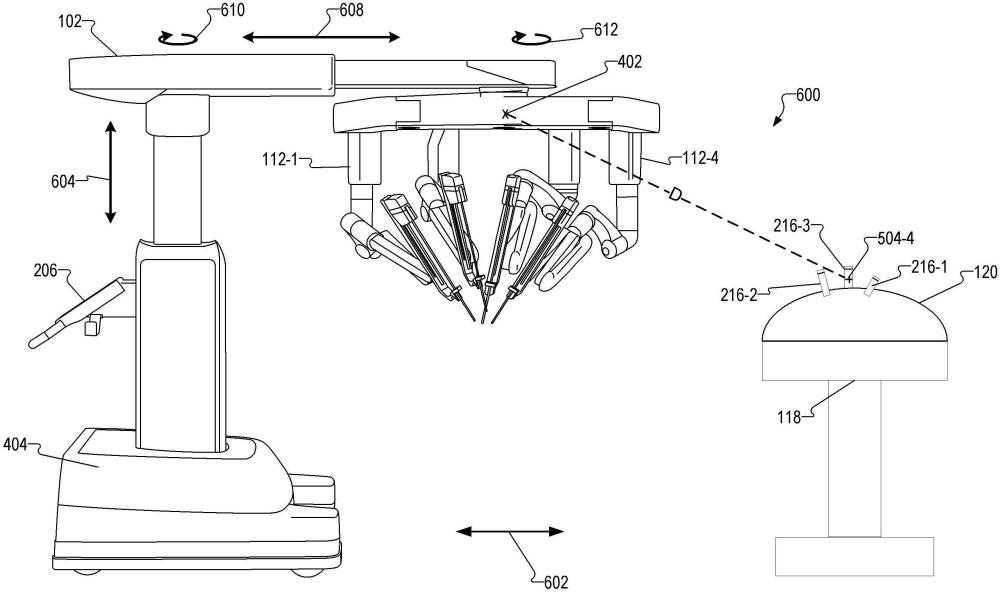
基于外科手术附件元件的机器人系统设置的制作方法
背景技术:1、机器人系统可以用于执行各种类型的医疗程序。机器人系统通常可以相对于患者进行设置(例如,导航和/或对接),从而为要执行的医疗程序做准备。机器人系统相对于患者进行的设置可能取决于许多因素,例......
-
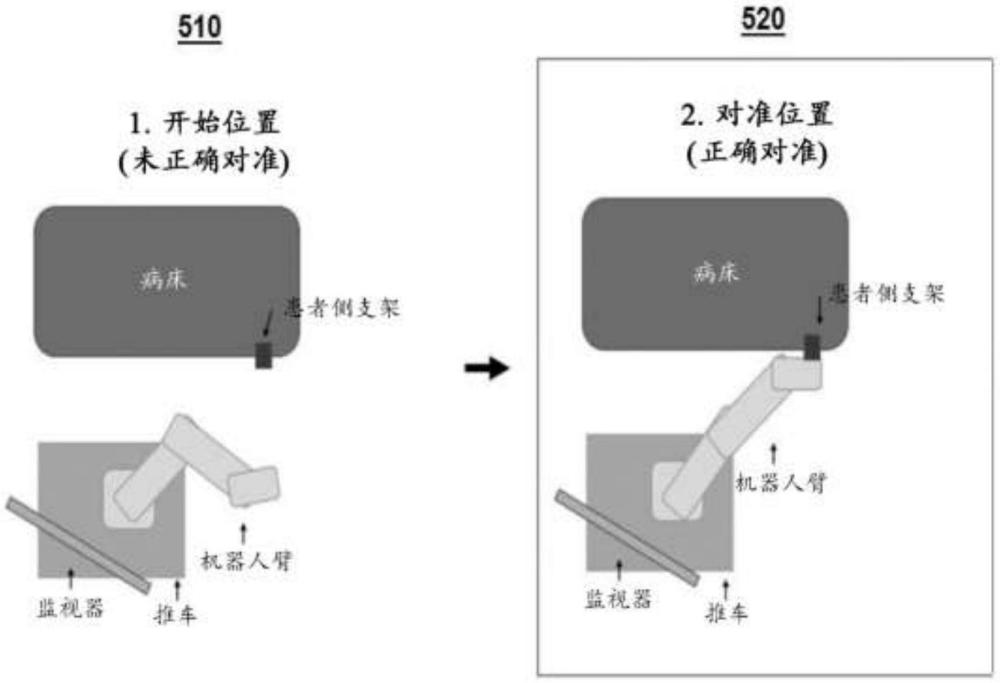
用于机器人内窥镜的自对准和调节的系统和方法与流程
背景技术:1、内窥镜检查程序使用内窥镜检查中空器官或体腔的内部。与许多其他医学成像技术不同的是,内窥镜直接插入器官中。可以递送依靠直觉的操纵和控制的柔性内窥镜用于诊断和治疗通过身体中的任何自然孔口可进......
-
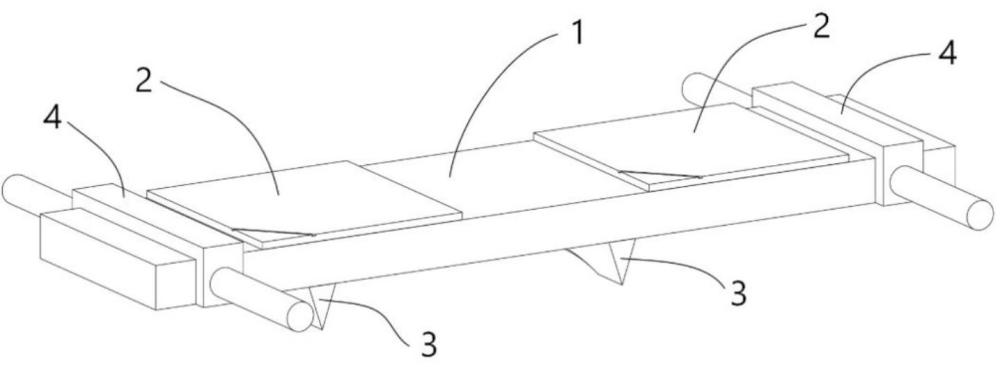
一种压电驱动的外管道攀爬机器人及其驱动方法
本发明涉及管道机器人,尤其涉及一种压电驱动的外管道攀爬机器人及其驱动方法。背景技术:1、小直径金属或pe管材因其轻质、耐腐蚀、耐高压等特性,在现代工业和城市建设中得到了广泛的应用。这些管材通常用于供水......
-
一种下水道清淤机器人的制作方法
本发明涉及下水道清淤,具体地说,涉及一种下水道清淤机器人。背景技术:1、下水道作为城市重要的基础设施,其规模随着城市人口的扩张不断壮大管网规模,每天排入下水道的污水与生活垃圾(含有油脂、结垢物、缠绕物......
-
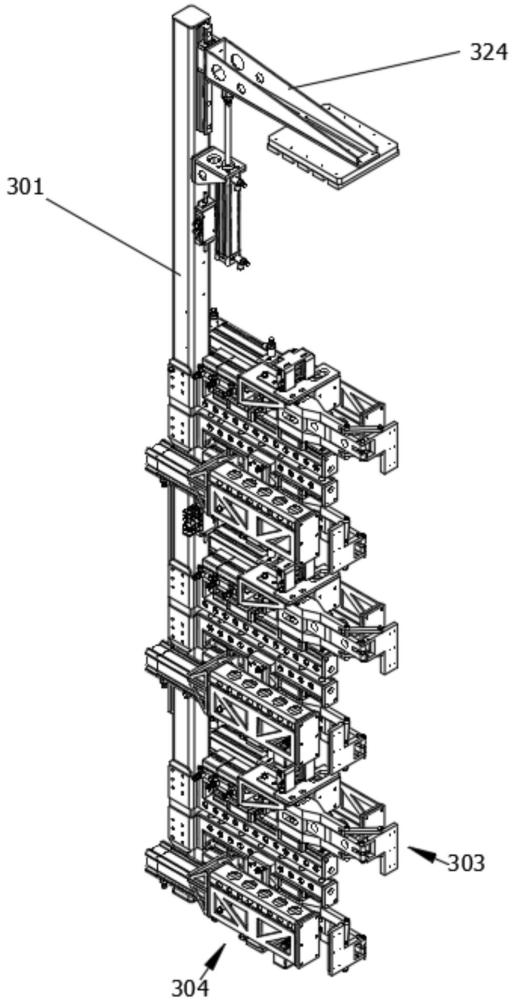
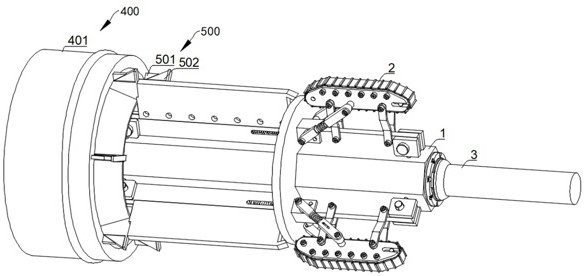
多晶硅硅棒自动拆炉的取棒夹具及机器人的制作方法
本发明涉及还原炉辅助设备,具体是涉及一种多晶硅硅棒自动拆炉的取棒夹具及机器人。背景技术:1、在多晶硅生产的还原炉中,完成沉积过程后的多晶硅硅棒(简称硅棒)需要经过专业的拆卸程序。早期多晶硅行业在国内刚......
-
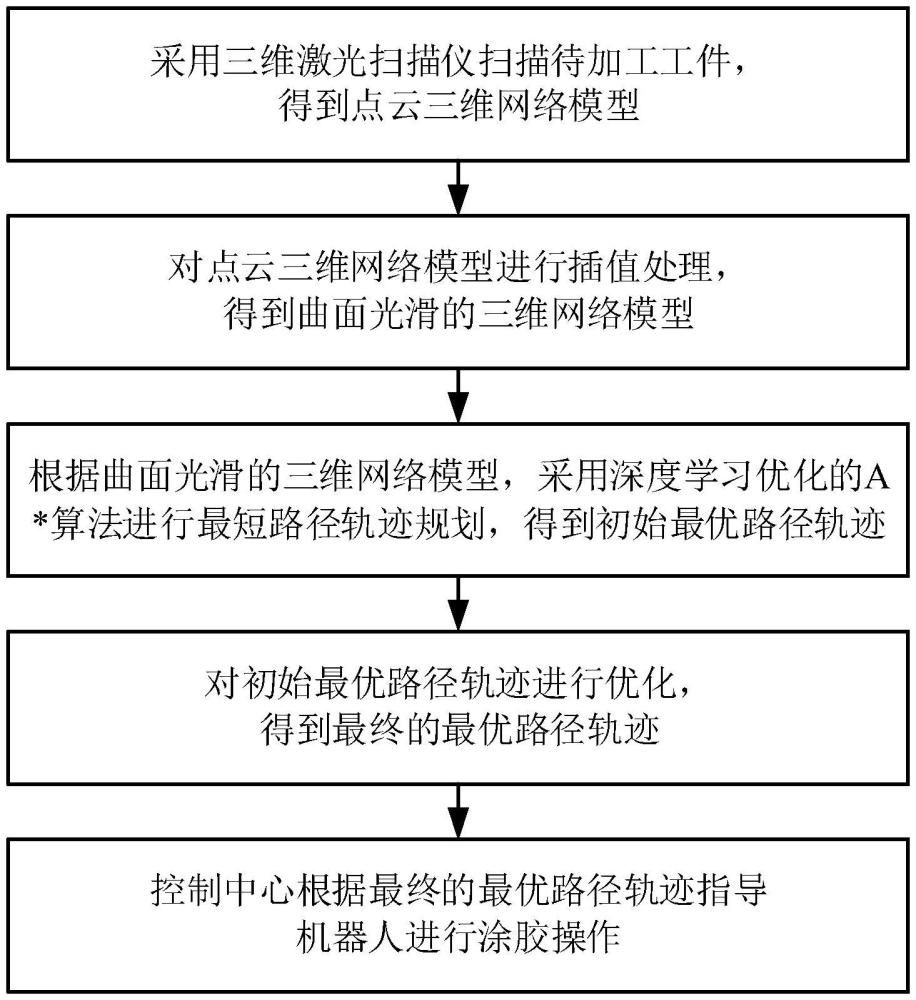
一种非规则曲面自动涂胶机器人轨迹规划方法及系统
本发明属于工业机器人领域,具体涉及一种非规则曲面自动涂胶机器人轨迹规划方法及系统。背景技术:1、在众多产品的制造过程中,涂胶是一道常见的重要步骤,涂胶的质量直接影响最终产品的整体质量。随着对产品要求的......
-
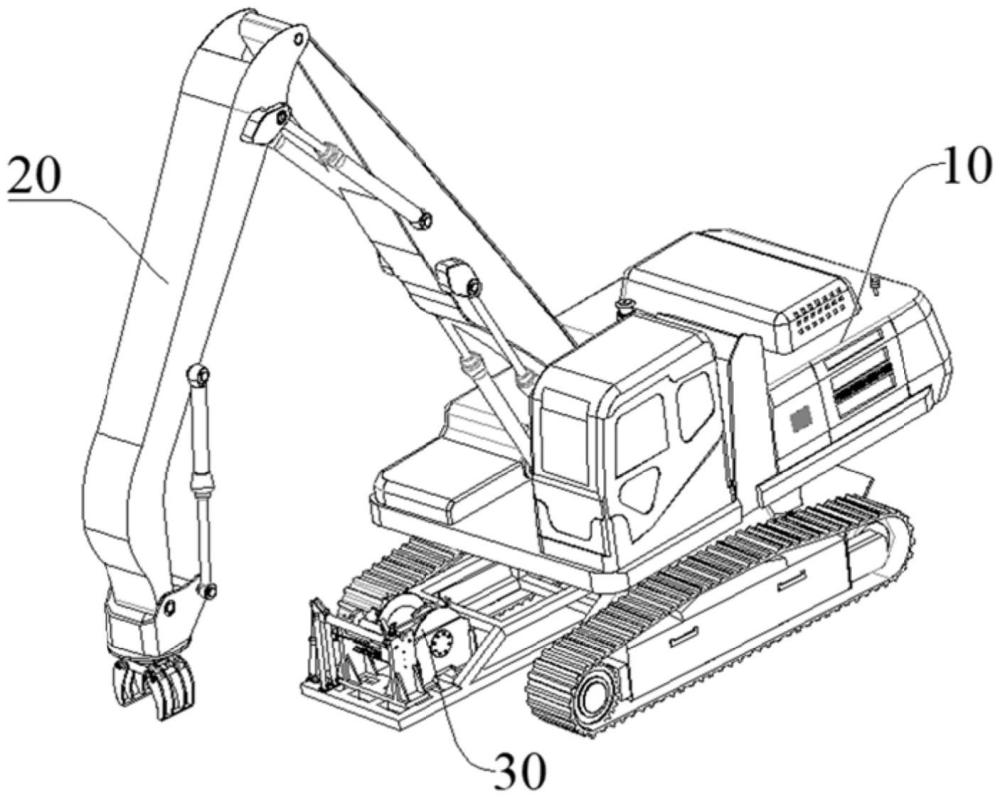
一种工程机器人的制作方法
本发明涉及机器人领域,特别涉及一种工程机器人。背景技术:1、在露天矿山的开采现场,电缆的牵引与拖拽工作涉及将电力从矿山上部的变电站传送到断崖下的开采一线,为生产设备提供电力。然而,在传统作业中,电缆需......
-
一种机器人运输设备及方法与流程
本发明涉及一种物体运输,具体涉及一种机器人运输设备及方法。背景技术:1、机器人运输是现代物流和制造业中不可或缺的一部分,它通过结合先进的机器人技术、自主导航系统和物品识别技术,实现了高效、智能的物品运......
-
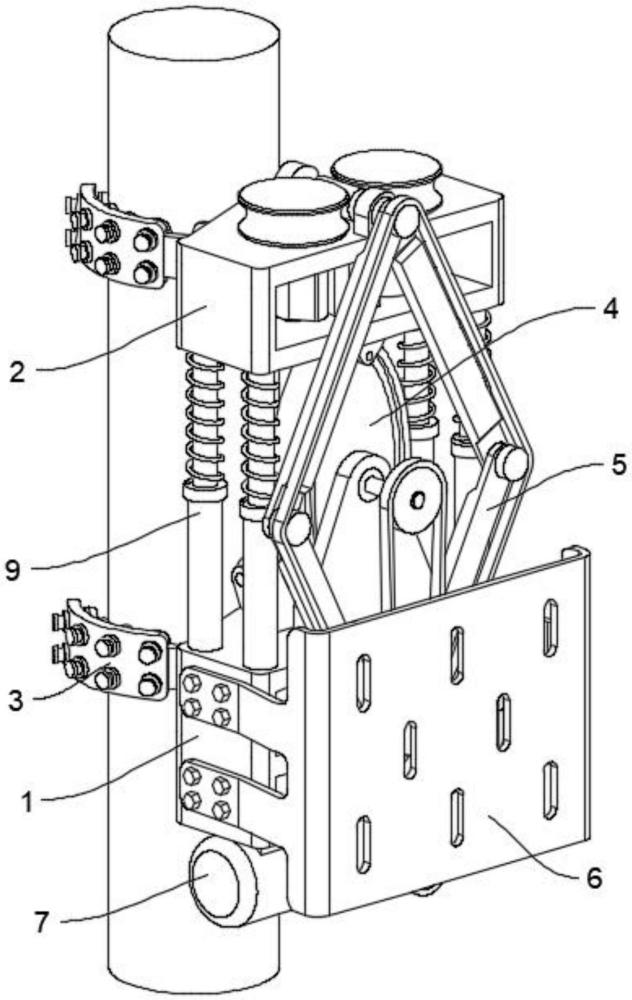
一种仿生爬杆机器人
本发明涉及仿生机器人领域,尤其涉及一种仿生爬杆机器人。背景技术:1、爬杆机器人用于替代人工实施高空爬杆作业,广泛应用于通讯、电力等领域,便捷的实现对高空设施监测、维修、清洁等工作;2、仿生式爬杆机器人......
 2024-11-21 27 #机器人
2024-11-21 27 #机器人
技术新讯 > 机器人 > 列表
精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01