围棋机器人交互方法及系统与流程
- 国知局
- 2024-11-21 11:55:14
本发明涉及计算机软件,具体地说,涉及一种围棋机器人交互方法及系统。
背景技术:
1、围棋起源于中国,是一种策略型两人棋类游戏。目前,围棋机器人已经成为一个越来越受欢迎的市场。从围棋大师的水平到初学者,围棋机器人可以满足不同水平的用户需求。现在,市场上已经有许多不同类型的事棋机器人,从小巧便携的智能手机应用到大型工业机器人,从入口级到专业级的产品都有。用户可以与机器人进行对弈,机器人会根据用户的棋力水平提供更加符合用户水平的游戏难度。
2、目前在对围棋机器人的棋盘角点进行坐标定位时,存在采取粘贴四个有颜色的纸条在棋盘边角的方法,这将会影响棋盘的外观。尤其是当用户棋盘较为昂贵时,更加无法接受这一做法。
3、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本申请的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、针对现有技术中的问题,本发明的目的在于提供一种围棋机器人交互方法及系统通过采集用户的交互响应操作数据来确定棋盘的角点坐标,以及交叉点坐标,便于机器人后续进行对棋局的推理,以及改善用户下棋体验。
2、为实现上述目的,本发明提供了一种围棋机器人交互方法,所述机器人具有机械臂,所述方法包括以下步骤:
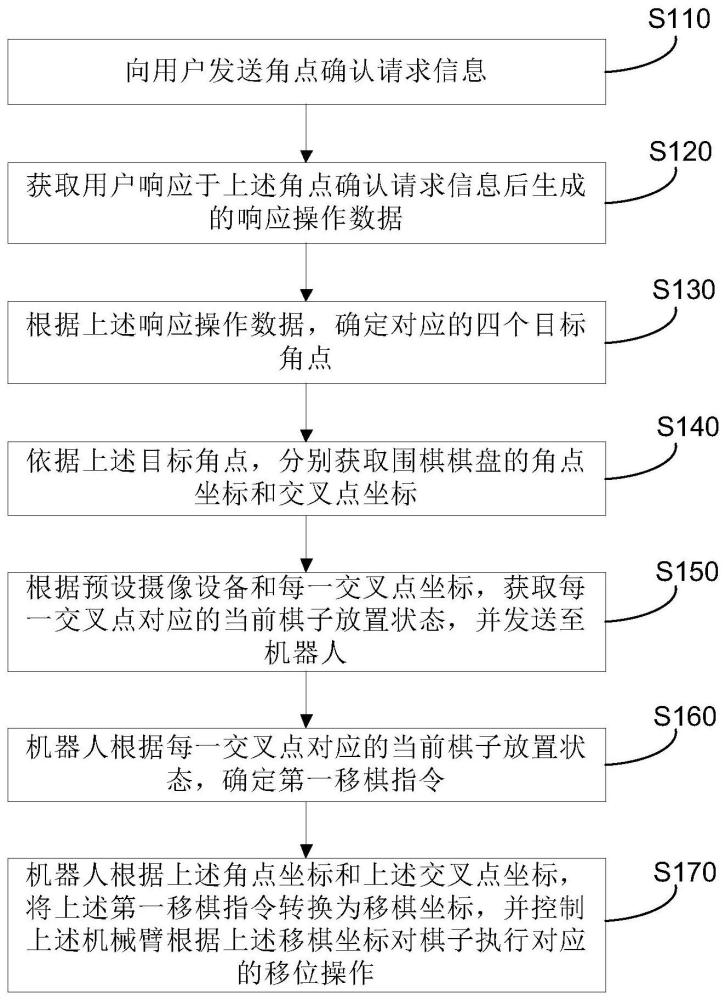
3、s110,向用户发送角点确认请求信息;
4、s120,获取用户响应于所述角点确认请求信息后生成的响应操作数据;
5、s130,根据所述响应操作数据,确定对应的四个目标角点;
6、s140,依据所述目标角点,分别获取围棋棋盘的角点坐标和交叉点坐标;
7、s150,根据预设摄像设备和每一交叉点坐标,获取每一交叉点对应的当前棋子放置状态,并发送至机器人;
8、s160,所述机器人根据每一交叉点对应的当前棋子放置状态,确定第一移棋指令;以及
9、s170,所述机器人根据所述角点坐标和所述交叉点坐标,将所述第一移棋指令转换为移棋坐标,并控制所述机械臂根据所述移棋坐标对棋子执行对应的移位操作。
10、可选地,在步骤s110之前,所述方法还包括步骤:
11、对棋盘和预设摄像设备的相对位置进行固定处理。
12、可选地,步骤s150包括:
13、根据预设摄像设备和每一交叉点坐标,获取每一交叉点的关于棋子放置的位置变化情况,并将所述位置变化情况发送给机器人。
14、可选地,所述机器人包括控制器、电动推杆、真空吸盘和真空泵,所述第一移棋指令包括取子点位信息和落子点位信息;步骤s170包括:
15、所述机器人根据所述移棋坐标,向所述控制器发送指令,使所述机械臂到达所述移棋坐标;
16、所述机器人基于所述电动推杆,使所述真空吸盘下降预设高度,直至所述真空吸盘充分接触围棋棋子的表面;
17、所述机器人控制所述真空泵运转预设时长,以对所述真空吸盘进行抽真空处理,使得所述真空吸盘吸住所述棋子;
18、所述机器人基于所述机械臂,将所述棋子移动至与所述落子点位信息对应的坐标位置,对所述真空吸盘注入空气,释放所述棋子。
19、可选地,所述围棋机器人应用于第一用户和第二用户的远程下棋场景,并执行所述第一用户发送的远程移棋指令;步骤s160包括:
20、所述机器人将每一交叉点对应的当前棋子放置状态发送给所述第一用户;
21、所述机器人接收所述第一用户远程发送的远程移棋指令,并根据所述远程移棋指令确定第一移棋指令。
22、可选地,于所述棋盘的中心交叉点上表面以及四个角点对应的交叉点上表面设有第一凸出部,且其余交叉点上表面不设有所述第一凸出部。
23、可选地,于所述棋盘的每一交叉点对应位置的上表面设有凹槽,所述围棋的棋子一侧表面设有第二凸出部,所述凹槽用于对所述第二凸出部进行限位。
24、可选地,所述方法还包括步骤:
25、当检测到所述围棋的棋子处于所述预设摄像设备的识别区域内时,检测所述棋子对应的颜色类别;所述颜色类别为黑色或白色;
26、向当前用户播放关于所述棋子对应的颜色类别的音频。
27、可选地,所述围棋的棋子中,黑色棋子的外表面设有第三凸出部,白色棋子的外表面为光滑结构;或者,
28、白色棋子的外表面设有第三凸出部,黑色棋子的外表面为光滑结构。
29、本发明还提供了一种围棋机器人交互系统,用于实现上述围棋机器人交互方法,所述系统包括:
30、角点确认请求模块,向用户发送角点确认请求信息;
31、响应操作数据获取模块,获取用户响应于所述角点确认请求信息后生成的响应操作数据;
32、目标角点确定模块,根据所述响应操作数据,确定对应的四个目标角点;
33、棋盘关键点坐标获取模块,依据所述目标角点,分别获取围棋棋盘的角点坐标和交叉点坐标;
34、棋子放置状态获取模块,根据预设摄像设备和每一交叉点坐标,获取每一交叉点对应的当前棋子放置状态,并发送至机器人;
35、第一移棋指令确定模块,所述机器人根据每一交叉点对应的当前棋子放置状态,确定第一移棋指令;以及
36、移棋操作模块,所述机器人根据所述角点坐标和所述交叉点坐标,将所述第一移棋指令转换为移棋坐标,并控制机械臂根据所述移棋坐标对棋子执行对应的移位操作。
37、本发明还提供了一种围棋机器人,包括:
38、处理器;
39、存储器,其中存储有所述处理器的可执行程序;
40、其中,所述处理器配置为经由执行所述可执行程序来执行上述任意一项围棋机器人交互方法的步骤。
41、本发明与现有技术相比,具有以下优点及突出性效果:
42、本发明提供的围棋机器人交互方法及系统通过采集用户的交互响应操作数据来确定棋盘的角点坐标以及交叉点坐标,可以避免采用粘贴纸条导致棋盘不美观的问题;另一方面提高了用户对于与机器人对弈的参与感,利于改善用户使用围棋机器人的下棋体验。
技术特征:1.一种围棋机器人交互方法,其特征在于,所述机器人具有机械臂,所述方法包括以下步骤:
2.如权利要求1所述的围棋机器人交互方法,其特征在于,在步骤s110之前,所述方法还包括步骤:
3.如权利要求1所述的围棋机器人交互方法,其特征在于,步骤s150包括:
4.如权利要求2所述的围棋机器人交互方法,其特征在于,所述机器人包括控制器、电动推杆、真空吸盘和真空泵,所述第一移棋指令包括取子点位信息和落子点位信息;步骤s170包括:
5.如权利要求4所述的围棋机器人交互方法,其特征在于,所述围棋机器人应用于第一用户和第二用户的远程下棋场景,并执行所述第一用户发送的远程移棋指令;步骤s160包括:
6.如权利要求1所述的围棋机器人交互方法,其特征在于,于所述棋盘的中心交叉点上表面以及四个角点对应的交叉点上表面设有第一凸出部,且其余交叉点上表面不设有所述第一凸出部。
7.如权利要求6所述的围棋机器人交互方法,其特征在于,于所述棋盘的每一交叉点对应位置的上表面设有凹槽,所述围棋的棋子一侧表面设有第二凸出部,所述凹槽用于对所述第二凸出部进行限位。
8.如权利要求6所述的围棋机器人交互方法,其特征在于,所述方法还包括步骤:
9.如权利要求1所述的围棋机器人交互方法,其特征在于,所述围棋的棋子中,黑色棋子的外表面设有第三凸出部,白色棋子的外表面为光滑结构;或者,
10.一种围棋机器人交互系统,用于实现如权利要求1所述的围棋机器人交互方法,其特征在于,所述系统包括:
技术总结本发明提供了一种围棋机器人交互方法及系统,所述方法包括步骤:向用户发送角点确认请求信息;获取根据用户的响应操作生成的响应操作数据;根据响应操作数据,确定对应的四个目标角点;依据目标角点,分别获取围棋棋盘的角点坐标和交叉点坐标;根据预设摄像设备和每一交叉点坐标,获取每一交叉点对应的当前棋子放置状态,并发送至机器人;机器人根据每一交叉点对应的当前棋子放置状态,确定第一移棋指令;以及机器人将第一移棋指令转换为移棋坐标,并控制机械臂根据移棋坐标对棋子执行对应的移位操作;本发明基于用户交互数据确定棋盘角点坐标,避免现有方法的相关问题,以及改善用户下棋体验。技术研发人员:覃健祥,钟铭,钟远受保护的技术使用者:浙江明仕智能科技有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/333398.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。