一种工程机器人的制作方法
- 国知局
- 2024-11-21 11:46:10
本发明涉及机器人领域,特别涉及一种工程机器人。
背景技术:
1、在露天矿山的开采现场,电缆的牵引与拖拽工作涉及将电力从矿山上部的变电站传送到断崖下的开采一线,为生产设备提供电力。然而,在传统作业中,电缆需要由工人从崖顶抛下至崖底,崖底的工人再进行电缆拖拽操作。
2、在建筑工地、道路抢险和地震等其他应用场景中,电缆的牵引与拖拽同样是关键环节。在建筑工地,电缆需要从主电源传输到各个施工点,由于施工环境复杂,电缆在运输和布置过程中可能遇到钢筋、土石等障碍物,增加了操作难度和危险性。在道路抢险中,特别是在紧急救援和恢复供电的情况下,电缆的快速布设至关重要,然而抢险现场通常地形复杂,拖拽电缆的工人可能面临滑倒、被重物砸伤等风险。地震等自然灾害发生后,电缆需要迅速布设以恢复电力供应,但余震、塌方等潜在危险,使得人工牵引电缆更加危险。
3、在拖拽电缆的过程中,工人面临着被碎石击中或塌方的危险,频繁发生工伤事故。因此,存在待改进之处。
技术实现思路
1、本发明的目的在于提供一种工程机器人,能够减少安全隐患。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
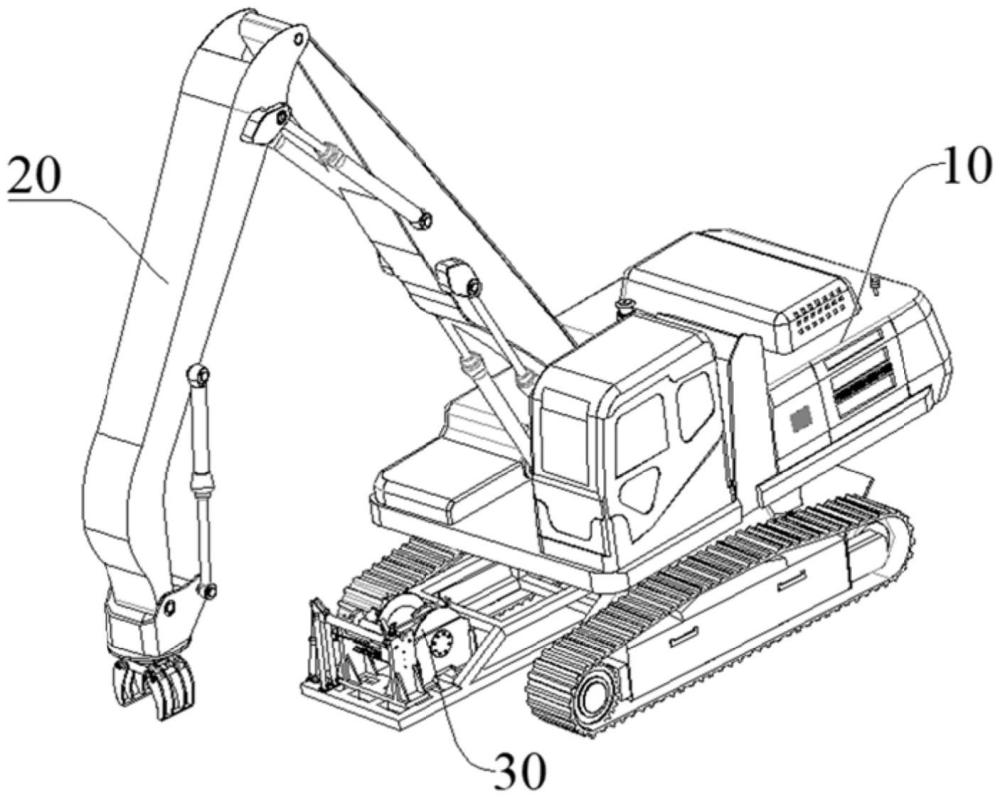
3、本发明提供了一种工程机器人,包括:
4、车体;
5、抓取机构,连接于所述车体上,用于抓取电缆;以及
6、收卷机构,用于收卷所述电缆,所述收卷机构包括:
7、收卷架,连接于所述车体上;
8、收卷动力源,连接于所述收卷架的一侧;
9、收卷滚筒,转动连接于所述收卷架上,且与所述收卷动力源的输出端连接;
10、至少一个夹紧槽,形成于所述收卷滚筒的一端上;
11、锚点结构,可拆卸连接于所述电缆的一端,所述锚点结构与所述夹紧槽的形状相适配。
12、在本发明一实施例中,所述夹紧槽包括卡槽与导向槽,所述卡槽与所述锚点结构的形状相适配,所述导向槽与所述卡槽的一端相连,所述导向槽与所述电缆的形状相适配;
13、所述收卷机构还包括至少一个隔离板,所述隔离板连接于所述收卷滚筒上,且位于所述导向槽的一侧,所述隔离板上形成有至少一个开口,所述开口与所述导向槽连通。
14、在本发明一实施例中,所述锚点结构包括:
15、紧固件,其内贯穿有通孔,所述电缆穿过该通孔;以及
16、锚头,用于固定所述电缆的一端,且与所述紧固件的一侧贴合,所述锚头包括可拆卸连接的锚头公件与锚头母件;
17、其中,在朝向所述锚头的方向上,所述锚头的一侧上形成有下沉区域,所述通孔居中设置于所述下沉区域上;
18、在朝向所述紧固件的方向上,所述锚头的一侧上形成有凸出部;
19、所述凸出部的侧壁与所述下沉区域的侧壁相贴合。
20、在本发明一实施例中,所述紧固件包括:
21、紧固主体,其内贯穿有所述通孔;以及
22、至少一个连接主体,其内贯穿有所述通孔,在背离所述锚头的方向上,所述连接主体固定于所述紧固主体上,所述连接主体的侧壁与通孔之间的间距小于所述紧固主体的侧壁与通孔之间的间距。
23、在本发明一实施例中,还包括排线机构,所述排线机构包括:
24、排线架,连接于所述车体上,且位于所述收卷机构的一侧;
25、至少一个导轨,连接于所述排线架上,所述导轨所在直线与所述收卷滚筒的中心轴所在直线相互平行;
26、排线结构,连接于所述导轨上;以及
27、驱动结构,用于带动所述排线结构在所述导轨上往复运动。
28、在本发明一实施例中,所述排线机构还包括至少一个第一滚筒,所述第一滚筒转动设于所述排线架上,且位于所述排线结构的侧面,所述第二滚筒所在直线与所述收卷滚筒的中心轴所在直线相互平行,所述第二滚筒的最高点的高度与所述收卷滚筒的最高点的高度相同。
29、在本发明一实施例中,所述排线结构包括:
30、底座,移动设于所述导轨上;
31、限位架,固定于所述底座上,在背离所述底座的方向上,所述限位架上设有间隙,所述限位架的间隙的宽度大于所述电缆的直径;以及
32、至少两个第二滚筒,转动设于所述限位架内,且位于所述限位架的间隙与所述底座之间,所述第二滚筒之间设有间隙,所述电缆活动于所述第二滚筒的间隙之间。
33、在本发明一实施例中,所述驱动结构包括:
34、往复丝杠,转动设于所述排线架上,所述往复丝杠与所述底座相配合,在所述往复丝杠转动时,带动所述底座在所述往复丝杠上往复运动;
35、其中,所述往复丝杠通过连接件与收卷动力源相连,所述收卷动力源带动所述往复丝杠转动,或者,所述驱动结构还包括排线动力源,所述排线动力源固定于所述排线架上,所述排线动力源带动所述往复丝杠转动。
36、在本发明一实施例中,还包括导向机构,所述导向机构包括:
37、旋转件,其中心一侧转动设于所述车体上;
38、伸缩推杆,其一端活动连接于所述车体上,另一端活动连接于所述旋转件的一端;以及
39、导向杆,其转动设于所述旋转件的另一端,所述导向杆的中心轴所在直线与所述收卷滚筒的中心轴所在直线相互平行。
40、在本发明一实施例中,所述抓取机构包括:
41、机械臂,其一端连接于所述车体上;
42、抓夹转盘,其包括固定端与转动端,所述固定端固定于所述机械臂的另一端上,所述转动端转动连接于所述固定端上;以及
43、机械抓夹,连接于所述转动端上,用于抓取所述电缆。
44、如上所述,本发明提供一种工程机器人,通过遥控操作或预设程序,帮助机器人完成电缆的抓取、牵引和拖拽作业。该设备可以替代人工进行抓取、牵引和拖拽工作,降低人员伤亡风险。该设备能够穿过或在复杂环境中操作,完成人工无法或不便进行的作业。该设备能够完成抓取、牵引和拖拽等多种作业任务,适应多种类型的目标物体和任务需求,增强了作业设备的灵活性和适应性。通过减少或避免人员进入危险区域,有效改善了工作环境,提升了整体作业的安全性与舒适性。
45、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:1.一种工程机器人,其特征在于,包括:
2.根据权利要求1所述的工程机器人,其特征在于,所述夹紧槽包括卡槽与导向槽,所述卡槽与所述锚点结构的形状相适配,所述导向槽与所述卡槽的一端相连,所述导向槽与所述电缆的形状相适配;
3.根据权利要求1所述的工程机器人,其特征在于,所述锚点结构包括:
4.根据权利要求3所述的工程机器人,其特征在于,所述紧固件包括:
5.根据权利要求1所述的工程机器人,其特征在于,还包括排线机构,所述排线机构包括:
6.根据权利要求5所述的工程机器人,其特征在于,所述排线机构还包括至少一个第一滚筒,所述第一滚筒转动设于所述排线架上,且位于所述排线结构的侧面,所述第二滚筒所在直线与所述收卷滚筒的中心轴所在直线相互平行,所述第二滚筒的最高点的高度与所述收卷滚筒的最高点的高度相同。
7.根据权利要求5所述的工程机器人,其特征在于,所述排线结构包括:
8.根据权利要求5所述的工程机器人,其特征在于,所述驱动结构包括:
9.根据权利要求1所述的工程机器人,其特征在于,还包括导向机构,所述导向机构包括:
10.根据权利要求1所述的工程机器人,其特征在于,所述抓取机构包括:
技术总结本发明提供了一种工程机器人,包括车体;抓取机构,连接于所述车体上,用于抓取电缆;以及收卷机构,用于收卷所述电缆,所述收卷机构包括:收卷架,连接于所述车体上;收卷动力源,连接于所述收卷架的一侧;收卷滚筒,转动连接于所述收卷架上,且与所述收卷动力源的输出端连接;至少一个夹紧槽,形成于所述收卷滚筒的一端上;锚点结构,可拆卸连接于所述电缆的一端,所述锚点结构与所述夹紧槽的形状相适配。通过本发明提供的一种工程机器人,能够减少安全隐患。技术研发人员:宁佳喜,叶华清,俞骥一,赵遵晓,常萧楠,许云鑫受保护的技术使用者:上海机器人产业技术研究院有限公司技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/332763.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表