基于地毯检测的机器人脱困方法与流程
- 国知局
- 2024-11-21 12:07:23
本技术涉及地毯识别的,具体涉及基于地毯检测的机器人脱困方法。
背景技术:
1、在家居环境中,除了铺设于客厅的大地毯外,也在入户门的地垫、厨房、浴室门口处设置的防滑地毯。这些防滑地毯通常放在门口,周围竖立起门槛、墙等。清洁机器人在移动到防滑地毯附近清洁时,因超声波传感器的检测范围小,从防滑地毯内退出时因调整空间不足而容易与墙体碰撞。
2、专利申请号为cn202211238871.8的中国发明专利公开基于超声波的地面环境运动规划方法,针对工作于带有地毯的地面环境中的清洁机器人,清洁机器人在遍历完一整块硬地面或沿着地毯的边界线行走过一圈后划分出多个地毯分区,会根据地毯分区的面积与硬地面的面积的比值来决定是否对该地毯分区进行遍历,清洁机器人在地毯分区内完成既定时间的遍历之后,通过提取边缘位置信息来重新定位回清洁机器人的当前位置,然后清洁机器人从该重新定位回的当前位置退出地毯,回到硬地面,由于各个地毯分区的边缘附近的硬地面会竖立起门槛、墙等,所以该重新定位回的当前位置与门槛、墙之间的可活动区域不大,清洁机器人因调整空间不足而无法正常后退规避地毯,即清洁机器人的机体后侧会碰撞墙体的同时,清洁机器人的机体前侧仍留在地毯内。因此清洁机器人从该重新定位回的当前位置退出地毯时会存在被卡困住的风险。
技术实现思路
1、本技术公开基于地毯检测的机器人脱困方法,提出以下技术方案:
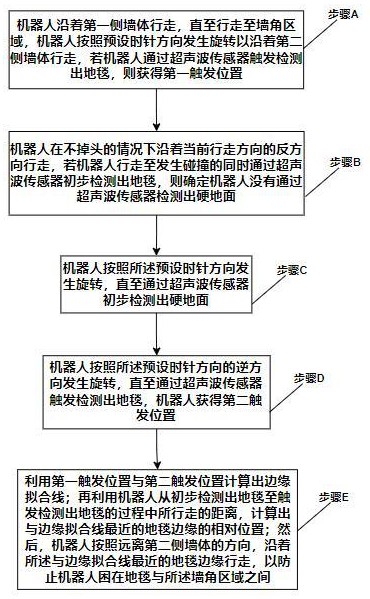
2、基于地毯检测的机器人脱困方法,机器人脱困方法应用于机器人,该机器人的机体一侧安装超声波传感器;所述机器人脱困方法包括:步骤a、机器人沿着第一侧墙体行走,直至行走至墙角区域,机器人按照预设时针方向发生旋转以沿着第二侧墙体行走,若机器人通过超声波传感器触发检测出地毯,则获得第一触发位置,然后执行步骤b;其中,墙角区域是硬地面上的第一侧墙体和第二侧墙体相交形成;步骤b、机器人在不掉头的情况下沿着当前行走方向的反方向行走,若机器人行走至发生碰撞的同时通过超声波传感器初步检测出地毯,则执行步骤c;步骤c、机器人按照所述预设时针方向发生旋转,直至通过超声波传感器初步检测出硬地面,然后执行步骤d;步骤d、机器人按照所述预设时针方向的逆方向发生旋转,直至通过超声波传感器触发检测出地毯,机器人获得第二触发位置,然后执行步骤e;步骤e、利用第一触发位置与第二触发位置计算出边缘拟合线;再利用机器人从初步检测出地毯至触发检测出地毯的过程中所行走的距离,计算出与边缘拟合线最近的地毯边缘的相对位置;然后,机器人按照远离第二侧墙体的方向,沿着所述与边缘拟合线最近的地毯边缘行走,以防止机器人困在地毯与所述墙角区域之间。
3、综上所述,本技术通过步骤a至步骤e来控制机器人旋转进出地毯,在旋转进出地毯的过程中控制超声波传感器先后检测出两个触发位置,推测出地毯边缘相对位置和脱困方向,从而控制机器人按照脱困方向且沿着地毯边缘走出当前被卡困的场景。实现在墙角区域的地毯边缘规划出机器人的脱困轨迹,降低地毯周围环境卡困机器人的风险,提升机器人在规避地毯的场景中的工作性能。
4、进一步地,在步骤a中,机器人沿着第一侧墙体行走时,第一侧墙体是超声波传感器探测到的最近墙体或距离机体一侧最近的墙体,超声波传感器是设置在机体远离地毯的一侧;其中,第一侧墙体和第二侧墙体相交;所述地毯中距离机器人最近的边缘与第一侧墙体之间的距离小于机器人的机体直径;其中,机器人在步骤c中通过预设时针方向的旋转来远离第二侧墙体;机器人在步骤e中设置的远离第二侧墙体的方向是第一触发位置指向第二触发位置的方向。因此,机器人在步骤c中通过预设时针方向的旋转来远离第二侧墙体,从而通过预设时针方向的旋转来控制超声波传感器由探测地毯变化为探测到硬地面,带动机器人的机头行走出地毯边缘,且超声波传感器探测到硬地面时所在位置相对于步骤a公开的第一触发位置远离第二侧墙体;进而机器人在步骤e中设置的远离第二侧墙体的方向是第一触发位置指向第二触发位置的方向,因此,机器人沿着所述与边缘拟合线最近的地毯边缘行走的过程中,既可以防止与第一侧墙体相碰撞,也可以防止与第二侧墙体相碰撞。
5、进一步地,在步骤a中,机器人沿着第一侧墙体行走直至机器人的前侧边缘与第二侧墙体的最小距离等于预设安全距离时,确定机器人已经进入所述墙角区域,并按照预设时针方向发生旋转以启动沿着第二侧墙体行走并初步检测出地毯,直至触发检测出地毯。从而构建出机器人从墙角区域出发检测地毯的环境。
6、进一步地,在步骤b中,机器人在不掉头的情况下,超声波传感器从第一触发位置开始沿着当前行走方向的反方向行走,直至机器人与第一侧墙体相碰撞,通过超声波传感器初步检测出地毯,确定超声波传感器的探测位置仍处于地毯内,进而确定机器人未完全退出地毯。
7、进一步地,在步骤c中,机器人通过超声波传感器没有初步检测出地毯,且通过超声波传感器没有触发检测出地毯时,确定机器人通过超声波传感器检测出硬地面;其中,机器人初步检测出地毯是通过对超声波传感器的探测数据进行阈值比较来完成。从而将不能检测出地毯的情形统一归类为检测出硬地面的情况。
8、进一步地,在步骤d中,所述机器人按照所述预设时针方向的逆方向发生旋转,直至通过超声波传感器触发检测出地毯,机器人获得第二触发位置的方法包括:机器人从步骤c检测出硬地面的位置开始,按照所述预设时针方向的逆方向发生旋转,当机器人通过超声波传感器初步检测出地毯时,确定超声波传感器的探测位置已经从其它地面介质变化为地毯,机器人继续按照所述预设时针方向的逆方向旋转于地毯,启动计数一个检测周期,并在该检测周期内依次采样多帧超声波数据,并对采样到的所有帧超声波数据进行滤波处理,再根据滤波处理的结果与滤波阈值大小关系确定机器人是否触发检测出地毯;若机器人触发检测出地毯,则将超声波传感器的安装位置标记为所述第二触发位置。
9、进一步地,在步骤a中,所述若机器人通过超声波传感器触发检测出地毯,则获得第一触发位置的方法包括:机器人按照预设时针方向发生旋转的过程中,机器人通过超声波传感器初步检测出地毯时,确定超声波传感器的探测位置已经从其它地面介质进入地毯,然后,机器人继续按照预设时针方向旋转于地毯,同时启动计数一个检测周期来采样多帧超声波数据,并对采样到的所有帧超声波数据进行滤波处理,再根据滤波结果与滤波阈值大小关系确定机器人是否触发检测出地毯;若机器人触发检测出地毯,则将超声波传感器的安装位置标记为所述第一触发位置。
10、综上,机器人从初步检测出地毯至触发检测出地毯需要机器人在跨越地毯边缘的基础上行走过一段距离,以预留时间进行采样和滤波处理,提高地毯的识别精度。
11、进一步地,在所述步骤e中,利用第一触发位置与第二触发位置计算出边缘拟合线的方法包括:在机器人构建的地图内,由第一触发位置的地图坐标和第二触发位置的地图坐标,构造直线方程,获得边缘拟合线,其中,边缘拟合线是所构造的直线方程在地图内表征的直线;第一触发位置指向第二触发位置的方向是边缘拟合线的延伸方向,以表示机器人沿着与所述边缘拟合线平行的地毯边缘行走的方向。
12、进一步地,在所述步骤e中,利用机器人从初步检测出地毯至触发检测出地毯的过程中行走的距离计算与边缘拟合线最近的地毯边缘的相对位置的方法包括:从初步检测出地毯至触发检测出地毯所耗费的时间是一个所述检测周期的情况下,超声波传感器从初步检测出地毯时所在的位置偏移至触发位置的过程中,按照既定的速度计算出机器人在边缘拟合线的垂直方向上所行走过的距离,再将计算出的距离标记为预脱困距离,以表示所述边缘拟合线与其最近的地毯边缘之间的距离;其中,触发位置是第一触发位置或第二触发位置;当所述边缘拟合线平行于与其最近的地毯边缘时,控制所述边缘拟合线在其垂直方向上的坐标减去预脱困距离,得到与边缘拟合线最近的地毯边缘的相对位置;其中,所述与边缘拟合线最近的地毯边缘是,机器人从硬地面行走至初步检测出地毯的过程中,所跨越的地毯边缘。从而通过计数和滤波,提高地毯边缘的相对位置的定位精度。
13、进一步地,在步骤e中,所述机器人按照远离第二侧墙体的方向,沿着所述与边缘拟合线最近的地毯边缘行走的方法包括:在计算出所述与边缘拟合线最近的地毯边缘的相对位置后,机器人朝着所述与边缘拟合线最近的地毯边缘的相对位置行走,直至超声波传感器的安装位置或机器人的机体中心处于所述与边缘拟合线最近的地毯边缘的相对位置上,再通过旋转将机器人的当前行走方向调整为所述边缘拟合线的延伸方向,然后沿着所述边缘拟合线的延伸方向行走,使机器人沿着所述与边缘拟合线最近的地毯边缘行走出所述墙角区域。则当机器人离开所述墙角区域时,机器人完成脱困,以便于机器人在空旷区域内规划后续的工作轨迹。防止机器人困在地毯与所述墙角区域之间。
本文地址:https://www.jishuxx.com/zhuanli/20241120/334444.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表