用于机器人内窥镜的自对准和调节的系统和方法与流程
- 国知局
- 2024-11-21 11:53:38
背景技术:
1、内窥镜检查程序使用内窥镜检查中空器官或体腔的内部。与许多其他医学成像技术不同的是,内窥镜直接插入器官中。可以递送依靠直觉的操纵和控制的柔性内窥镜用于诊断和治疗通过身体中的任何自然孔口可进入的疾病。依据临床适应症,内窥镜可以被指定为支气管镜、输尿管镜、结肠镜、胃镜、耳鼻喉镜及各种其他的内窥镜。例如,柔性支气管镜可以用于肺癌诊断和/或手术治疗。然而,支气管镜检查的一个难题是在导航通过气道的同时到达肺上叶。在另一示例中,柔性内窥镜检查已被用于检查和治疗胃肠(gi)道紊乱,而无需在患者身上创建开口。内窥镜分别经由口或肛门引入上gi道或下gi道中。远端处的微型相机捕获gi壁的图像,该图像帮助临床医生诊断gi疾病。可以通过经由工作通道引入柔性工具以到达远端处的感兴趣部位来执行简单的外科手术(如息肉切除术和活检)。
2、传统上,内窥镜是可重复使用的,每次手术后可能需要对其进行彻底清洁、消毒和/或灭菌。在大多数情况下,清洁、消毒和灭菌可以是杀死病菌和/或细菌的侵略性过程。这样的程序也可能对内窥镜本身很苛刻。因此,这种可重复使用的内窥镜的设计通常可能很复杂,特别是为了确保内窥镜能够经受住这种苛刻的清洁、消毒和灭菌方案。通常可能需要对这种可重复使用的内窥镜进行定期维护和修理。
3、对于难以正确清洁的器械,指定用于单次使用的低成本一次性医疗设备已经变得很受欢迎。单次使用的一次性设备可以用无菌包装纸包装,以避免诸如hiv、肝炎和其他病原体的疾病的致病性交叉污染风险。医院普遍欣然接受单次使用的一次性产品的便利性,因为他们无须再担心产品的老化、过度使用、破损、故障和灭菌。传统内窥镜通常包括操作员用以操控内窥镜的手柄。对于单次使用的内窥镜,手柄通常在近端包封相机、昂贵的电子器件和机械结构,以便传输视频并允许用户经由用户界面操控内窥镜。这可能导致单次使用的内窥镜的手柄的高成本。
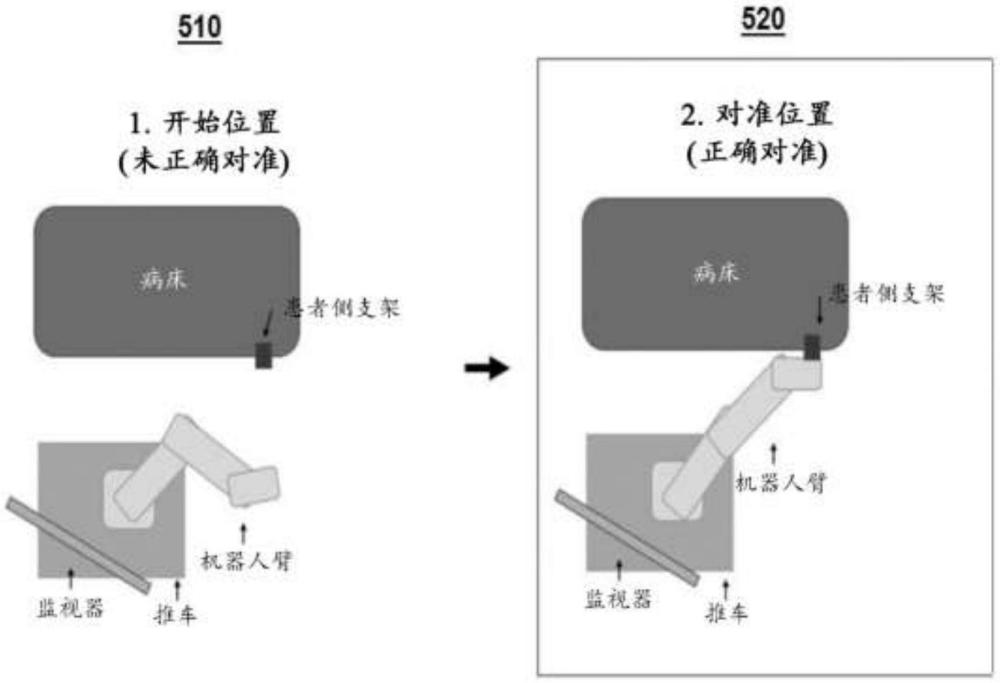
4、由于要设置的配件数量和复杂的工作流程,导致设置医疗机器人的过程可能非常耗时且具有挑战性。设置时间可能导致房间周转时间更长,从而造成手术延迟。当前系统工作流程中具有挑战性的步骤示例是:(1)将机器人系统定位在适合手术的位置和(2)将仪器驱动机构与患者侧对准。这些步骤具有挑战性,是因为用户必须考虑手术所需的房间中其他设备的放置,并在手动执行这些步骤时获得对机器人组件的工作空间的空间理解。在手术期间,如果房间设置存在任何变化,则用户必须手动调节系统以进行适应。
技术实现思路
1、本文认识到需要一种机器人内窥镜平台或系统,其允许机器人内窥镜系统响应于实时操作环境自主调节。本公开内容通过提供能够检测和跟踪系统的操作环境(例如,系统周围的外部环境)并自动调节系统的方法和系统来解决上述需求,从而(1)简化操作员在系统设置期间和/或手术期间的工作流程,以及(2)使系统配置比手动完成的放置更优化,手动完成的放置可能被视为可接受但不是最佳的。在一些实施例中,系统的自主处理和/或移动可以包括将机器人内窥镜设备的仪器驱动机构(idm)与患者侧支架对准、将机器人基站(例如,机器人推车)相对于患者或医院套件设备对准、识别其他技术/设备并自动配置兼容性、避免系统与患者和/或操作环境中的其他物体之间的碰撞、基于实时仪器屈曲检测和对患者呼吸/生命体的监测来自调节机器人臂或idm等。
2、本公开的一个方面中,提供了一种用于机器人内窥镜系统的方法。该方法包括:生成机器人内窥镜系统周围环境的3d深度图;基于3d深度图将机器人支撑系统的自推进基座自主地致动到相对于病床的期望位置,其中机器人支撑系统包括机器人臂,该机器人臂在近端耦合到自推进基座,在远端经由仪器驱动机构(idm)耦合到柔性内窥镜装置;自主地致动臂以避免碰撞;以及致动机器人臂,以将idm与耦合到病床或作为病床一部分的组件对准。在给定3d深度图输入的情况下,为启用系统组件的自主重新定位实现的方法需要用于处理和滤波图像数据的算法、将图像数据映射到机器人控制算法的输入以及用于避障的算法。
3、本文认识到需要一种机器人内窥镜,该内窥镜允许以改进的性能和成本效率执行外科手术或诊断操作。本文还认识到包括内窥镜的设备和系统,该内窥镜可以是一次性的并且可以不需要大量的清洁程序。本公开提供了低成本、单次使用的可铰接内窥镜,用于在各种应用(诸如支气管镜检查、泌尿外科、妇科、关节镜检查、矫形外科、耳鼻喉科、胃肠内窥镜检查、神经外科和各种其他应用)中进行诊断和治疗。在一些实施方式中,本公开提供了单次使用、机器人控制的一次性支气管镜,用于与机器人系统一起使用,以实现对肺部解剖结构中任何位置的损伤的诊断评估。应当注意,所提供的内窥镜系统可以在各种微创外科手术、涉及包括心脏、膀胱和肺组织等各种类型的组织的治疗性或诊断性手术中使用,并可以在患者身体的其他解剖结构区域(诸如包括但不限于食道、肝脏、胃、结肠、尿道的消化系统或包括但不限于支气管、肺的呼吸系统以及各种其他区域)中使用。
4、应当注意的是,所提供的自主配置、对准和碰撞避免方法、内窥镜组件和设备的各种组件可以在各种微创外科手术、涉及包括心脏、膀胱和肺组织等各种类型的组织的治疗性或诊断性手术中使用,并可以在患者身体的其他解剖结构区域(诸如包括但不限于食道、肝脏、胃、结肠、尿道的消化系统或包括但不限于支气管、肺的呼吸系统以及各种其他区域)中使用。
5、在一个方面,提供了一种用于在环境中控制机器人内窥镜系统移动和操作的方法。该方法包括:生成机器人内窥镜系统周围环境的3d深度图;基于3d深度图,将机器人支撑系统的自推进基座自主地致动到相对于病床的期望位置,其中机器人支撑系统包括在近端耦合到自推进基座和在远端耦合到仪器驱动机构(idm)的机器人臂;以及致动机器人臂以将idm自主地与耦合到病床或作为病床的一部分的组件对准。
6、在相关但独立的方面,提供了一种用于控制机器人内窥镜系统的系统,该系统包括:存储计算机可执行指令的存储器;一个或多个处理器,其与机器人内窥镜系统通信并且被配置为执行计算机可执行指令以:生成机器人内窥镜系统周围环境的3d深度图;基于3d深度图,将机器人支撑系统的自推进基座自主地致动到相对于病床的期望位置,其中机器人支撑系统包括在近端耦合到自推进基座和在远端耦合到仪器驱动机构(idm)的机器人臂;并且致动机器人臂以将idm自主地与耦合到病床或作为病床的一部分的组件对准。
7、在一些实施例中,至少部分基于3d点云数据生成3d深度图。在一些情况下,该方法还包括处理3d深度图以检测病床并计算机器人支撑系统相对于病床的位置和方向。在一些实施例中,在idm与耦合到病床或作为病床的一部分的组件对准之后,柔性内窥镜装置可释放地耦合到idm。
8、在一些实施例中,该方法还包括控制机器人臂的移动,以将idm移动到距耦合到所述病床或作为所述病床的一部分的组件的预定距离。在一些情况下,该方法还包括加载柔性内窥镜装置,以在近端耦合到idm并在远端耦合到组件。在一些情况下,该方法还包括在检测到屈曲事件时自动调节idm相对于组件的位置。
9、在一些实施例中,该方法还包括检测和识别环境中的物体,并重新配置机器人臂以避免与物体碰撞,同时保持idm的位置和方向。在一些情况下,该方法还包括在将耦合到idm的柔性导管插入患者体内时检测该柔性导管的屈曲。在一些情况下,该方法还包括执行响应速度控制算法以控制柔性导管的尖端的速度,同时重新配置机器人臂以避免与物体碰撞。
10、在一些实施例中,至少部分基于传感器数据,idm自主地与组件对准。在一些情况下,传感器数据由电磁传感器捕获。在一些情况下,传感器数据由包括放置在组件上的基准标记的相机捕获,并且3d深度图至少包括基准标记的3d位置。
11、根据以下详细描述,本公开的附加方面和优点将对本领域技术人员而言变得容易理解,其中仅示出并描述了本公开的说明性实施方式。如将被认识到的,本公开能够具有其他和不同的实施方式,并且其若干细节能够在各种明显方面进行修改,所有这些都是在不背离本公开的情况下。因此,附图和描述本质上被视为是说明性的,而不是限制性的。
12、援引并入
13、本说明书中提及的所有出版物、专利和专利申请均通过引用并入本文,其程度如同具体地和单独地指出通过引用而并入每个单独的出版物、专利或专利申请。在通过引用而并入的出版物和专利或专利申请与说明书中包含的公开内容相矛盾的情况下,说明书旨在取代和/或优先于任何此类矛盾的材料。
本文地址:https://www.jishuxx.com/zhuanli/20241120/333243.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
水性组合物的制作方法
下一篇
返回列表