具有锁定模式的平面运动并联机器人
- 国知局
- 2024-11-21 12:10:03
本发明涉及机器人,具体涉及具有锁定模式的平面运动并联机器人。
背景技术:
1、平面运动并联机器人在对位、分拣、运动仿真装备领域有广泛应用。并联机器人具有刚度高、动态性能好的特点。多模式并联机器人能根据工业生产的具体需求,变换运动模式,扩展机器人的应用范围。
2、平面运动机器人在锁定驱动的情况下,末端执行器处于静止状态,可以保持特定位置和姿态,抵抗外界作用力。现有平面运动并联机器人,均需要通过锁定驱动,来实现末端执行器的锁定,末端执行器在锁定状态下,所能承受的外界作用力,主要通过机器人的驱动器来提供,一定程度上限制了机器人保持特定位置和姿态,抵抗外界作用力的能力。
技术实现思路
1、本发明的目的是提供具有锁定模式的平面运动并联机器人,通过对机器人运动模式的变换,使得其不通过锁定驱动器,实现对末端执行器的锁定,方便平面机器人在运动到特定位置和姿态时,在承受较大的外界作用力的情况下可以保持位置和姿态的稳定,为后续作业流程奠定基础。
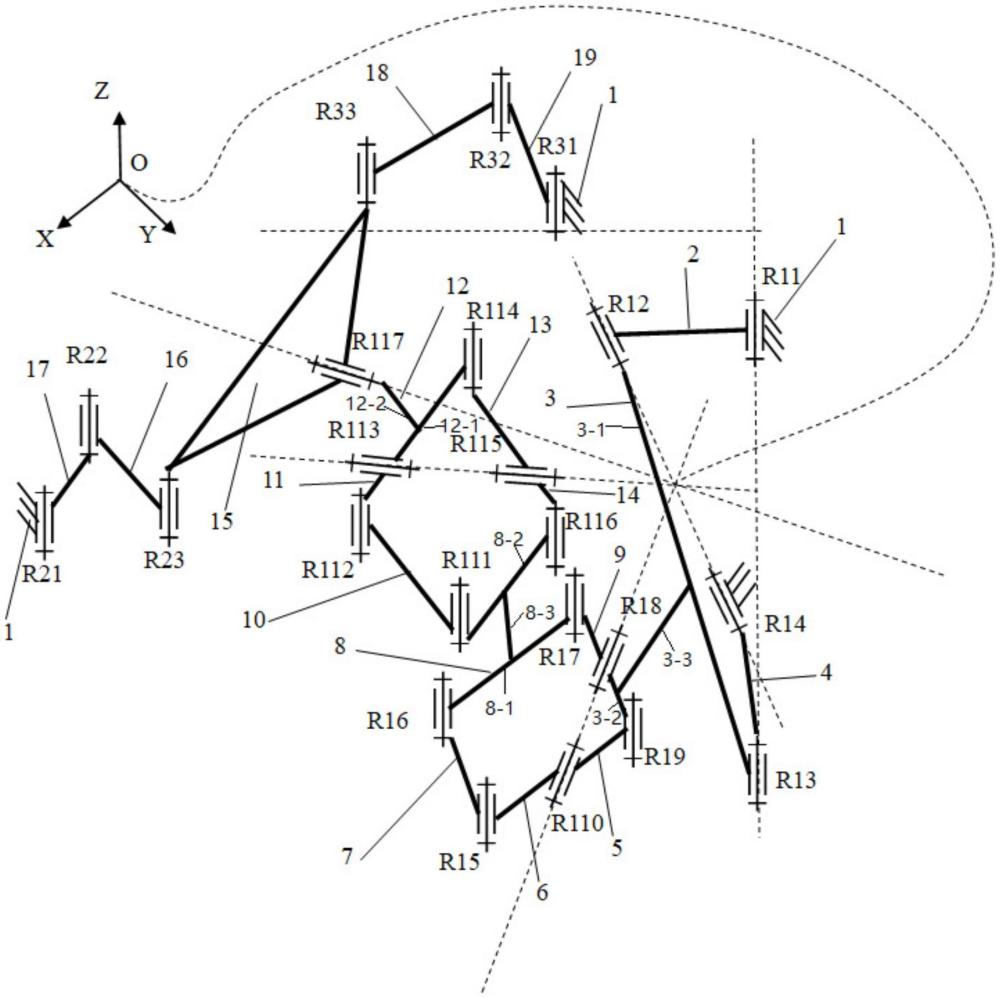
2、本发明所采用的技术方案是,具有锁定模式的平面运动并联机器人,包括有定平台及动平台,定平台与动平台之间设置有第一运动支链、第二运动支链及第三运动支链;
3、第一运动支链包括有依次连接的第一支链组件、第三连杆组件、第二支链组件、第八连杆组件、第三支链组件、第十二连杆组件及第十七转动副r117;第一支链组件还与定平台连接,第十七转动副r117还与动平台连接。
4、本发明的特征还在于:
5、第三连杆组件包括有第一横杆及第二横杆,第一横杆及第二横杆之间设置有第一横杆连接杆;
6、第八连杆组件包括有第三横杆及第四横杆,第三横杆及第四横杆之间设置有第二横杆连接杆;
7、第十二连杆组件包括有第五横杆及竖杆,竖杆的一端与第五横杆连接,竖杆的另一端通过第十七转动副r117与动平台连接;
8、第一支链组件包括有依次连接的第一转动副r11、第二连杆及第二转动副r12;还包括有依次连接的第三转动副r13、第四连杆及第四转动副r14,第四转动副r14及第一转动副r11均与定平台连接;第一横杆的第一端与第二转动副r12连接,第一横杆的第二端与第三转动副r13连接;
9、第二支链组件包括有设置在第三横杆第一端与第二横杆第一端之间依次连接的第七转动副r17、第九连杆及第八转动副r18,第八转动副r18与第二横杆的第一端连接,第七转动副r17与第三横杆的第一端连接;还包括有设置在第三横杆第二端与第二横杆第二端之间依次连接的第六转动副r16、第七连杆、第五转动副r15、第六连杆、第十转动副r110、第五连杆及第九转动副r19,第九转动副r19与第二横杆的第二端连接,第六转动副r16与第三横杆的第二端连接;
10、第三支链组件包括有设置在第五横杆第一端与第四横杆第一端之间依次连接的第十四转动副r114、第十三连杆、第十五转动副r115、第十四连杆及第十六转动副r116,第十六转动副r116与第四横杆的第一端连接,第十四转动副r114与第五横杆的第一端连接;还包括有设置在第五横杆第二端与第四横杆第二端之间依次连接的第十三转动副r113、第十一连杆、第十二转动副r112、第十连杆及第十一转动副r111,第十一转动副r111与第四横杆的第二端连接,第十三转动副r113与第五横杆的第二端连接。
11、第二运动支链包括有依次连接的第二十一转动副r21、第十七连杆、第二十二转动副r22、第十六连杆及第二十三转动副r23,第二十三转动副r23还与动平台连接,第二十一转动副r21还与定平台连接。
12、第三运动支链包括有依次连接的第三十一转动副r31、第一连杆、第三十二转动副r32、第十八连杆及第三十三转动副r33,第三十三转动副r33还与动平台连接,第三十一转动副r31还与定平台连接。
13、第一转动副r11连接有转动电机。
14、第二十一转动副r21连接有转动电机。
15、第四转动副r14连接有辅助转动电机。
16、本发明的有益效果是:
17、(1)本发明具有锁定模式的平面运动并联机器人不需要锁定驱动,即可使得末端执行器在特定工作位形下,处于锁定状态,可以使得末端执行器在运动和锁定两种模式间进行快速变换,通过对机器人运动模式的变换,使得其不通过锁定驱动器,实现对末端执行器的锁定,方便平面机器人在运动到特定位置和姿态时,在承受较大的外界作用力的情况下可以保持位置和姿态的稳定,为后续作业流程奠定基础。
18、(2)本发明具有锁定模式的平面运动并联机器人末端执行器在锁定位形下,所能承受的外界作用力的能力,与驱动功率无关,是由机器人处于锁定状态下整个结构的刚度和材料的强度所确定。
技术特征:1.具有锁定模式的平面运动并联机器人,其特征在于,包括有定平台(1)及动平台(15),定平台(1)与动平台(15)之间设置有第一运动支链、第二运动支链及第三运动支链;
2.根据权利要求1所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第三连杆组件(3)包括有第一横杆(3-1)及第二横杆(3-2),第一横杆(3-1)及第二横杆(3-2)之间设置有第一横杆连接杆(3-3);
3.根据权利要求1所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第二运动支链包括有依次连接的第二十一转动副r21、第十七连杆(17)、第二十二转动副r22、第十六连杆(16)及第二十三转动副r23,第二十三转动副r23还与动平台(15)连接,第二十一转动副r21还与定平台(1)连接。
4.根据权利要求1所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第三运动支链包括有依次连接的第三十一转动副r31、第一连杆(19)、第三十二转动副r32、第十八连杆(18)及第三十三转动副r33,第三十三转动副r33还与动平台(15)连接,第三十一转动副r31还与定平台(1)连接。
5.根据权利要求2所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第一转动副r11连接有转动电机。
6.根据权利要求3所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第二十一转动副r21连接有转动电机。
7.根据权利要求2所述的具有锁定模式的平面运动并联机器人,其特征在于,所述第四转动副r14连接有辅助转动电机。
技术总结本发明公开具有锁定模式的平面运动并联机器人,包括有定平台及动平台,定平台与动平台之间设置有第一运动支链、第二运动支链及第三运动支链;第一运动支链包括有依次连接的第一支链组件、第三连杆组件、第二支链组件、第八连杆组件、第三支链组件、第十二连杆组件及第十七转动副R117;第一支链组件还与定平台连接,第十七转动副R117还与动平台连接。该机器人的动平台的运动模式能够变为锁定模式,在锁定模式下具有较强的承载能力和静态刚度从而提升动平台的静态承载能力和刚度。技术研发人员:刘伟,刘鹏,封磊受保护的技术使用者:西安工程大学技术研发日:技术公布日:2024/11/18本文地址:https://www.jishuxx.com/zhuanli/20241120/334649.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表