-
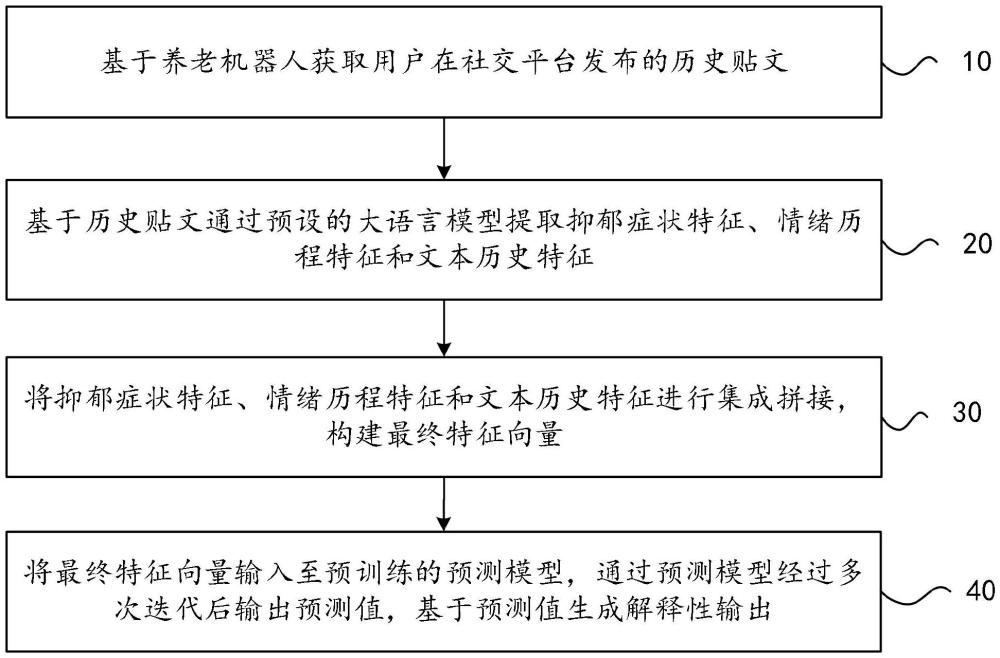
一种基于养老机器人的健康监测方法及其养老机器人与流程
本发明涉人工智能,尤其涉及一种基于养老机器人的健康监测方法及其养老机器人。背景技术:1、随着社会老龄化,老人的数量越来越多,然而年轻人陪伴老人的时间越来越少,因此,随时时间的推移,老年人的心理可能会出......
-
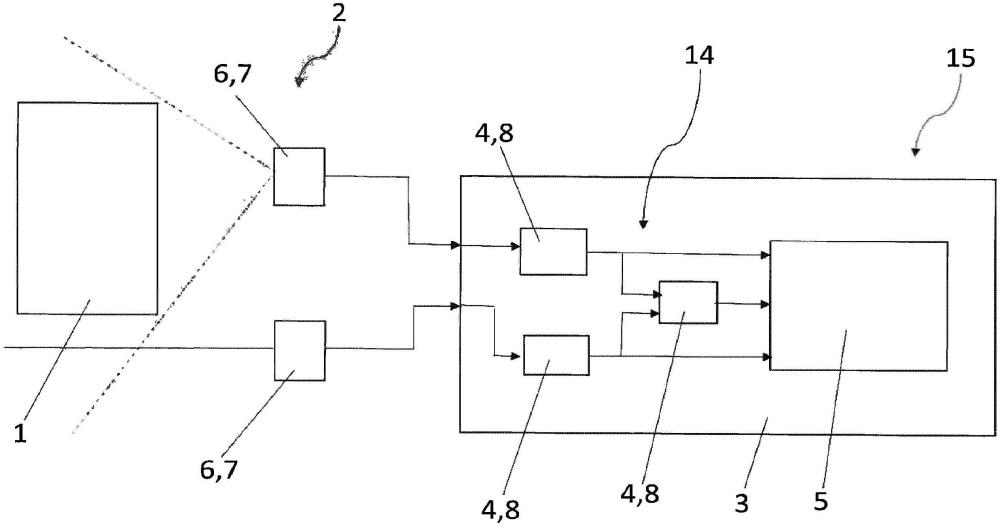
脊椎椎板切割路径的规划装置、方法及手术机器人与流程
本发明涉及医疗,尤其涉及一种脊椎椎板切割路径的规划装置、方法及手术机器人。背景技术:1、随着医疗器械技术的发展和革新,手术机器人等辅助工具逐渐被应用到外科手术(例如椎弓根钉的导航定位、骨关节切割)中,......
-

移动机器人与基站对接方法、移动机器人以及存储介质与流程
本说明书涉及移动机器人,尤其涉及一种移动机器人与基站对接方法、移动机器人以及存储介质。背景技术:1、随着科学技术的发展,目前,移动机器人已被广泛应用在社会生活中,为人们的生活带来便利。例如,最常见的移......
-
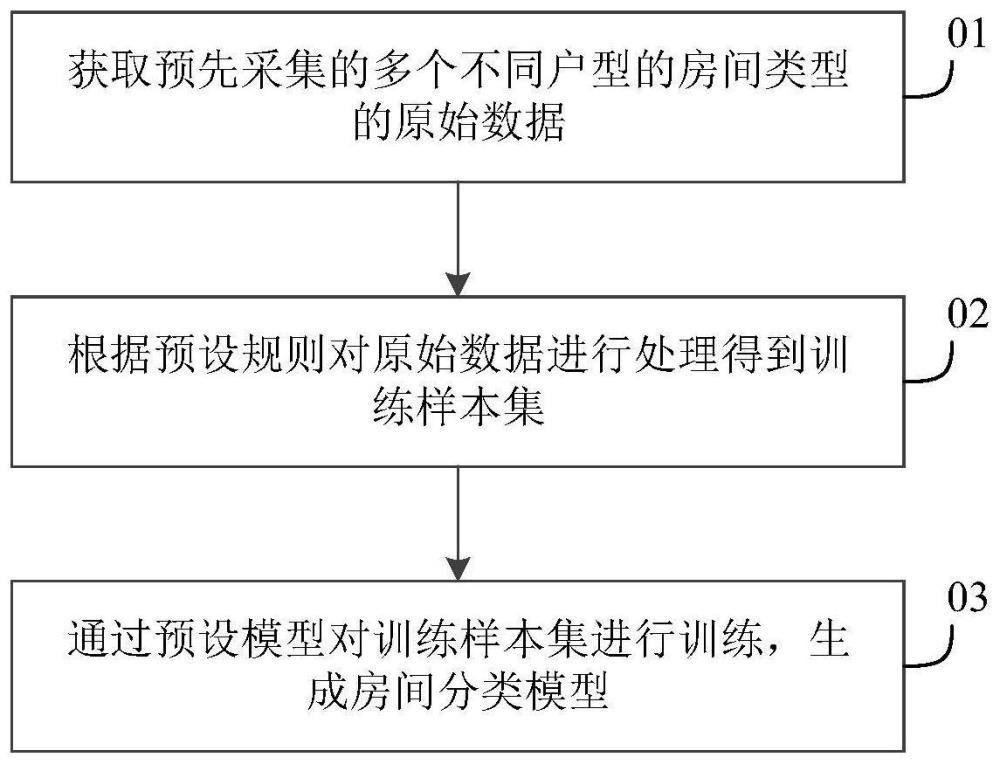
构建方法、识别方法及其装置、计算机设备、清洁机器人与流程
本技术涉及智能清洁机器人领域,特别涉及一种房间分类模型的构建方法、识别方法及其装置、计算机设备、清洁机器人及计算机可读存储介质。背景技术:1、随着智能家居领域的发展,人们更多地选择清洁机器人完成家庭的......
-
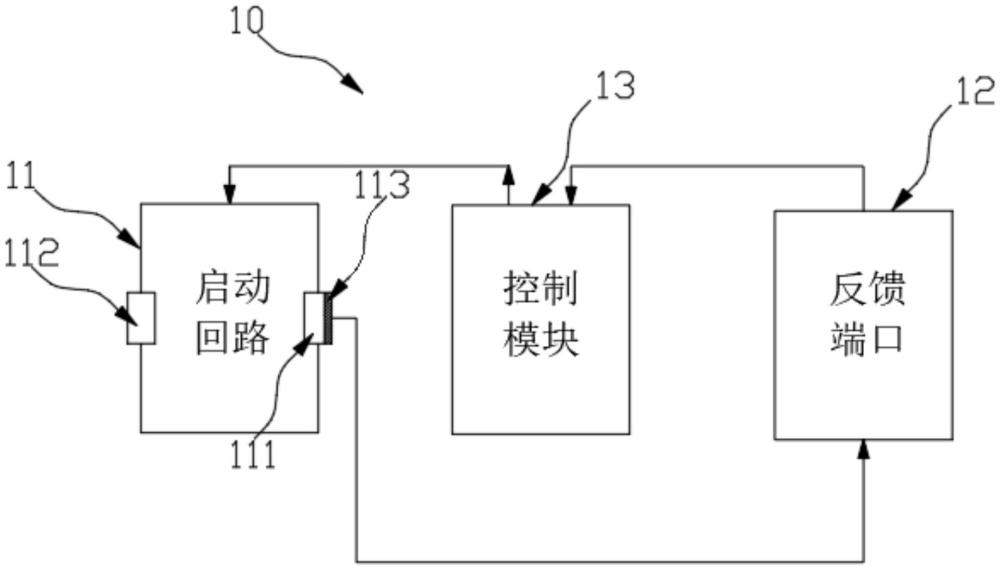
一种启动系统及其方法及手术机器人与流程
本发明涉及手术机器人的,尤其涉及一种启动系统及其方法及手术机器人。背景技术:1、手术机器人是集合多项现代高科技技术于一体的综合体,随着手术机器人的大量临床应用,解决了很多医疗难题。2、手术机器人系统包......
-
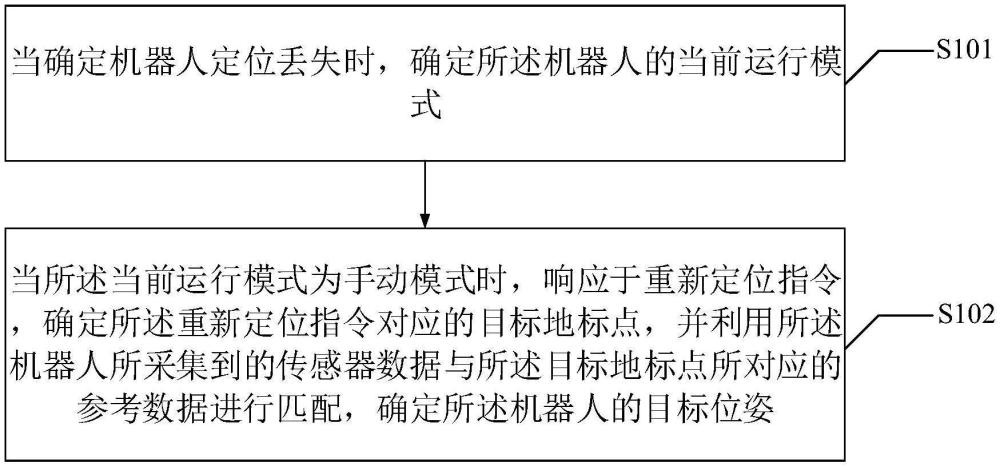
一种机器人定位方法、机器人定位装置及机器人与流程
本技术涉及机器人,尤其是涉及一种机器人定位方法、机器人定位装置及机器人。背景技术:1、随着经济与科技的发展,机器人已经应用在生活中的多个领域。例如,具有清洁功能的机器人得到了广泛的应用,尤其是在大型场......
-
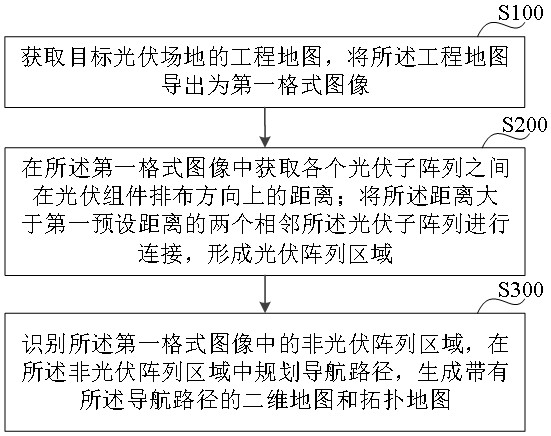
一种导航地图生成方法、系统和巡检机器人与流程
本申请涉及地图导航领域,具体而言,涉及一种导航地图生成方法、系统和巡检机器人。背景技术:1、随着光伏产业的不断发展,光伏项目智能化进程不断加速,智能巡检等依赖地图导航的光伏产品需求也逐渐增加。当前,基......
-

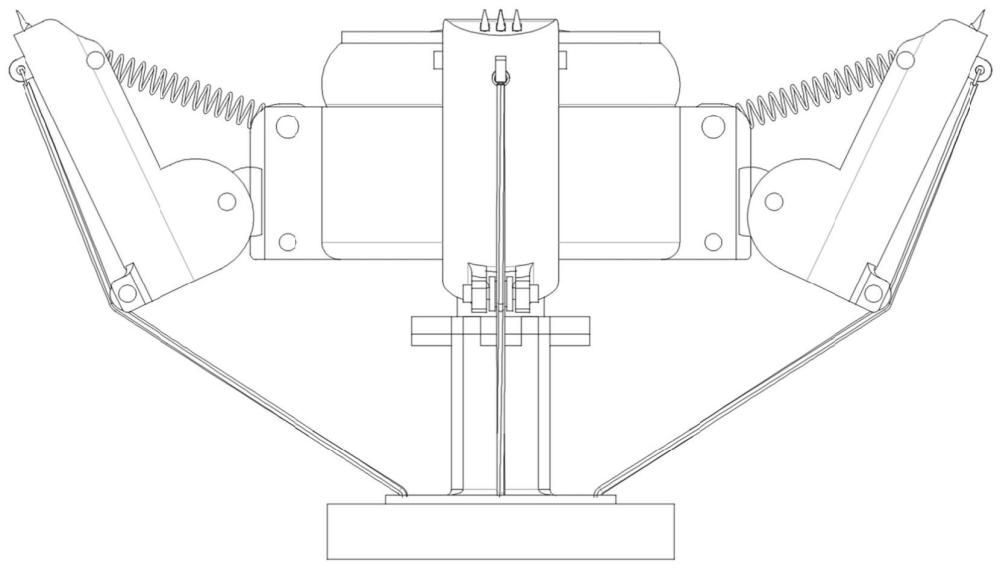
恒力弹簧损伤检测方法、平衡组件及手术机器人与流程
本技术涉及机械设备,尤其涉及一种恒力弹簧损伤检测方法、平衡组件及手术机器人。背景技术:1、随着医疗器械、计算机技术及控制技术的不断发展,微创手术以其手术创伤小、康复时间短、患者痛苦少等优点得到了越来越......
-
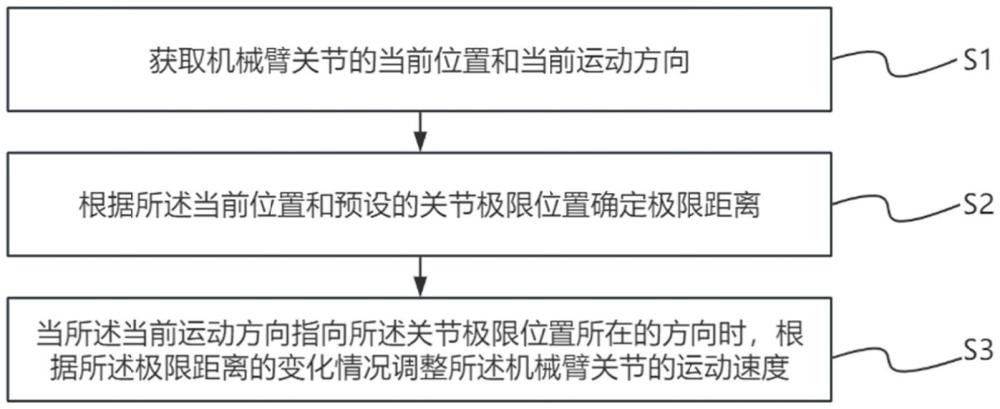
一种机械臂控制方法、电子设备及机器人与流程
本发明涉及机器人,具体而言,涉及一种机械臂控制方法、电子设备及机器人。背景技术:1、机器人作为现代科技的产物,已经在许多领域展示出了巨大的潜力和应用价值,例如工业制造机器人、手术机器人、农业生产机器人......
-
一种立焊转仰焊的自动焊接方法、应用及焊接机器人与流程
本发明涉及轨道交通领域,尤其是一种立焊转仰焊的自动焊接方法、应用及焊接机器人。背景技术:1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。2、轨道车辆在其制作过程中,涉及到较......
-

一种用于移动机器人导航的方法、装置及移动机器人与流程
本申请涉及移动机器人,尤其涉及一种用于移动机器人导航的技术。背景技术:1、在诸如送餐、巡逻、监控和工业生产等多样化的场景中,移动机器人的应用十分广泛。针对各类复杂场景环境,有时必要让移动机器人在特定区......
-
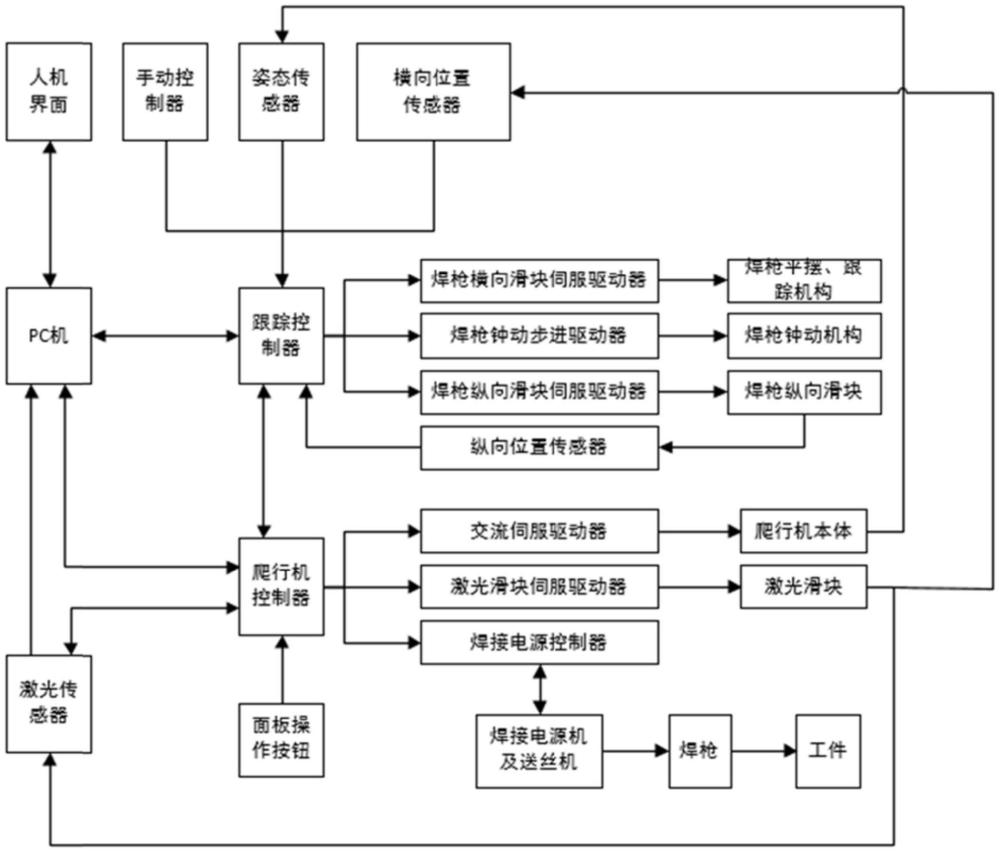
爬行焊接机器人的控制方法及爬行焊接机器人与流程
本发明涉及焊接装置,尤其是涉及一种爬行焊接机器人的控制方法及爬行焊接机器人。背景技术:1、在金属结构焊接领域,对钢制储罐、球罐、管道、船体等大中型平面或弧面设备进行焊接作业时,通常是采用手工作业为主,......
-

路径规划方法、装置、可读存储介质和机器人与流程
本技术涉及移动机器人,具体而言,涉及一种路径规划方法、装置、可读存储介质和机器人。背景技术:1、随着移动机器人在多领域的广泛应用,兼容工业场景与服务场景的移动机器人路径规划算法变得越来越重要。2、在相......
-
用于产生用于移动物流机器人的周围环境地图的方法和移动物流机器人与流程
本发明涉及一种用于产生用于移动物流机器人的周围环境地图的方法,其中,借助传感装置检测该周围环境,并且在处理器单元中分析处理传感器数据,其中,产生该周围环境的具有单元格的虚拟栅格,其中,将在其中探测到对......
-

一种机器人动作轨迹规划方法、装置及机器人与流程
本申请涉及机器人,尤其涉及一种机器人动作轨迹规划方法、装置及机器人。背景技术:1、机器人动作轨迹是指机器人从起点到完成任务的终点这条路线上的各关节轨迹变化,其代表了机器人每个关节在时间序列上的位姿。2......
-
一种基于人与车辆通过轨道运输巷风门的警示装置的制作方法
本技术涉及轨道安全,具体为一种基于人与车辆通过轨道运输巷风门的警示装置。背景技术:1、为了方便人和车辆的进出,轨道运输系统通常在需要的位置设置了轨道运输巷风门。这些巷风门可以通过特定的入口和出口方便地......
-
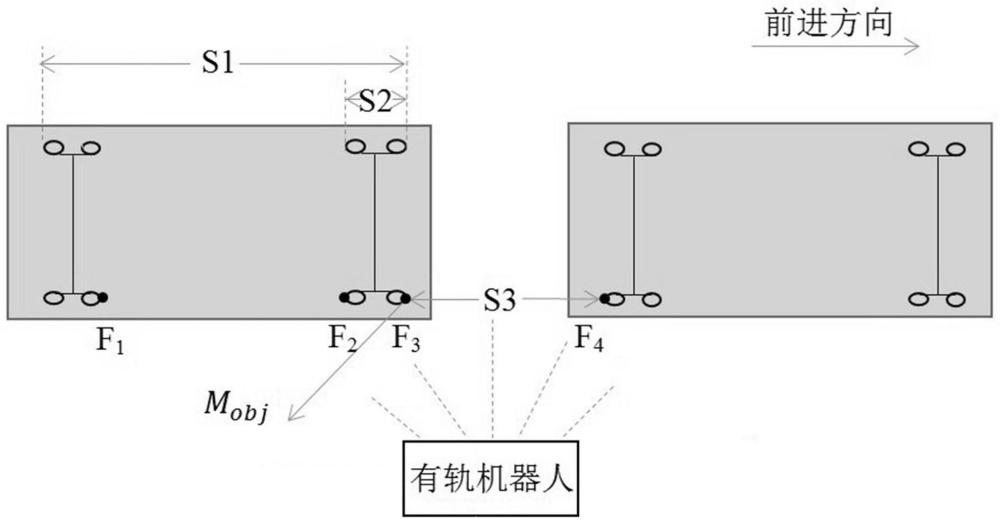
有轨机器人与车厢共速的方法和设备与流程
本发明一般涉及雷达跟踪控制领域,并且更具体地,涉及有轨机器人与车厢共速的方法和设备。背景技术:1、在铁路作业场景,为不影响效率,须在火车车厢运行不停车的情况下对故障车厢进行移动跟随作业。但是,车厢的运......
-
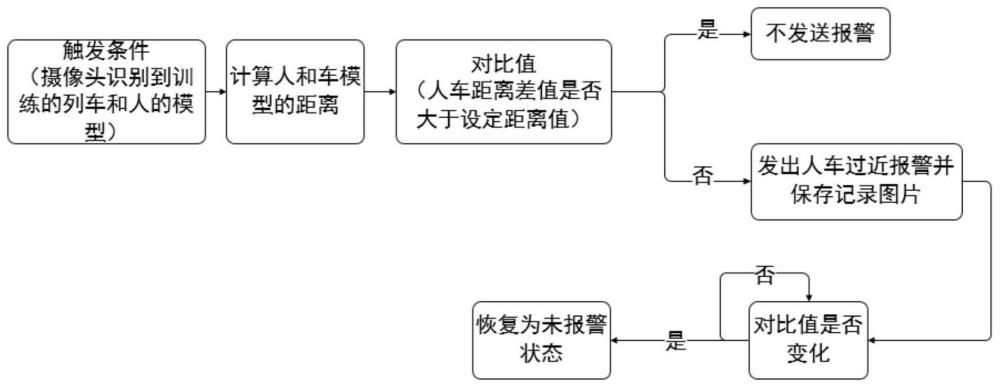
厂区铁路沿线人与列车安全距离检测方法和系统与流程
本发明涉及安防防护领域,具体地,涉及厂区铁路沿线人与列车安全距离检测方法和系统。背景技术:1、由于厂区铁路沿线列车实现了自动运行,作业人员在经过铁轨以及在铁轨区域进行作业时,存在自动行驶的列车靠近情况......
-
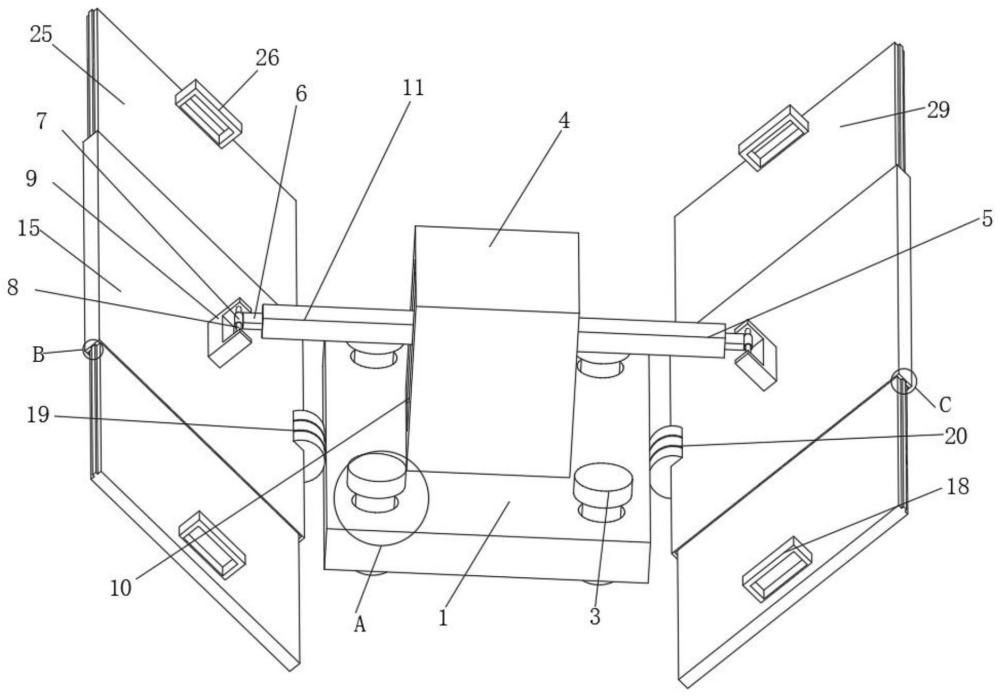
水下协同附着装置及其水下机器人与工作方法
本发明属于机器人应用,具体涉及一种面向水下复杂表面的吸盘、钩刺和粘附材料协同附着装置和仿葎草的轮式攀附的装置及其多螺旋桨水下机器人运动方式,主要作为水下复杂表面的附着移动平台。背景技术:0、技术背景1......
-
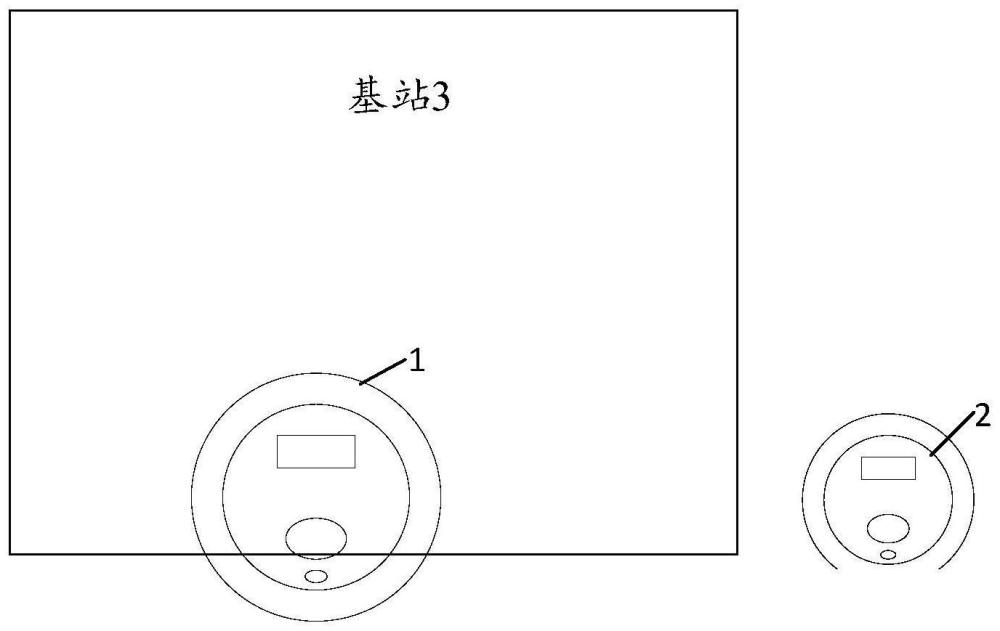
定位校准方法、多机器人协作系统、工作方法及机器人与流程
本技术涉及机器人,尤其涉及一种定位校准方法、多机器人协作系统、工作方法及机器人。背景技术:1、机器人,如清洁机器人、割草机器人、物流机器人、探测机器人等等,已被广泛应用。大多数应用场景中,使用一种尺寸......
-
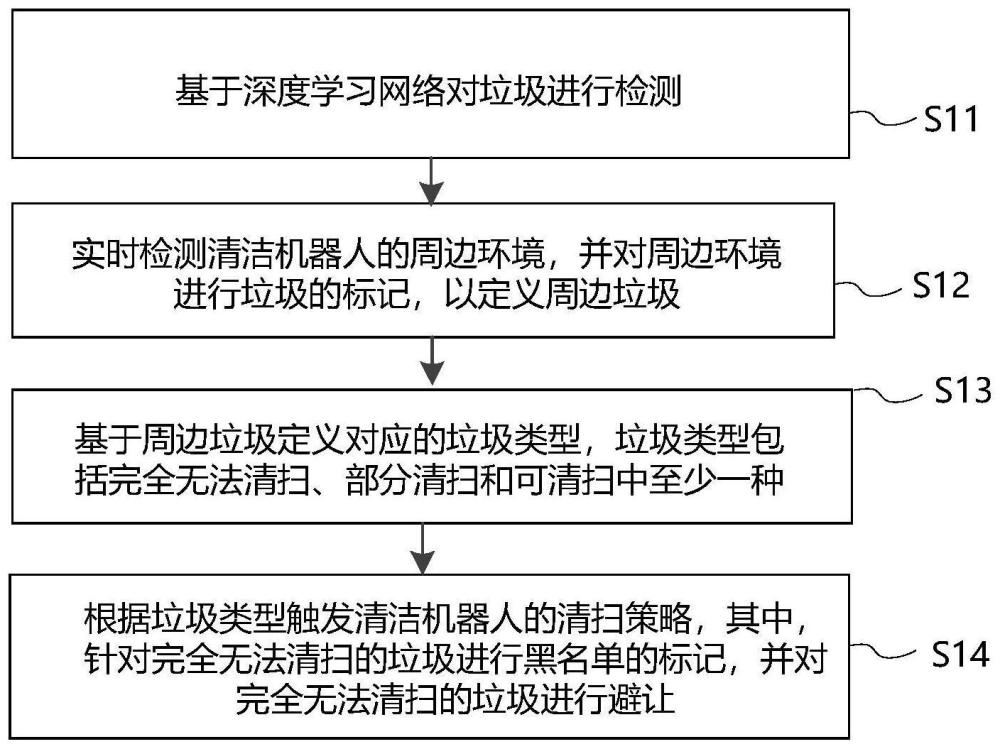
一种可清扫垃圾检测方法和清洁机器人与流程
本发明涉及清洁机器人的,尤其涉及一种可清扫垃圾检测方法和清洁机器人。背景技术:1、随着科技的发展,清洁机器人逐步应用于人们的生活中,并用于清扫处于地面的垃圾,在清洁机器人执行清扫任务时,清洁机器人能够......
-
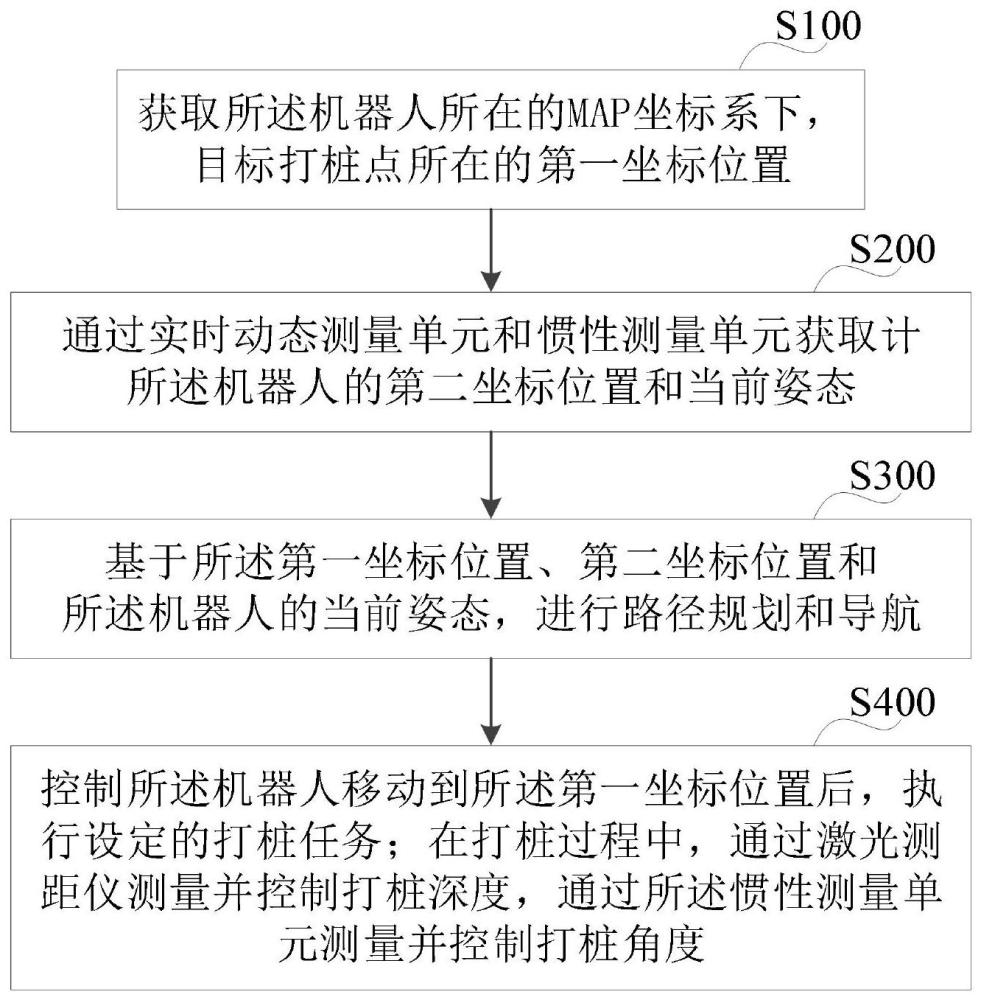
一种自动打桩方法、系统和光伏打桩机器人与流程
本申请涉及新能源,具体而言,涉及一种自动打桩方法、系统和光伏打桩机器人。背景技术:1、目前,光伏电站在建设初期,需要搭建支架,然后再安装组件。根据不同的地形,支架的立柱需要不同的地桩来支撑。光伏行业内......
-
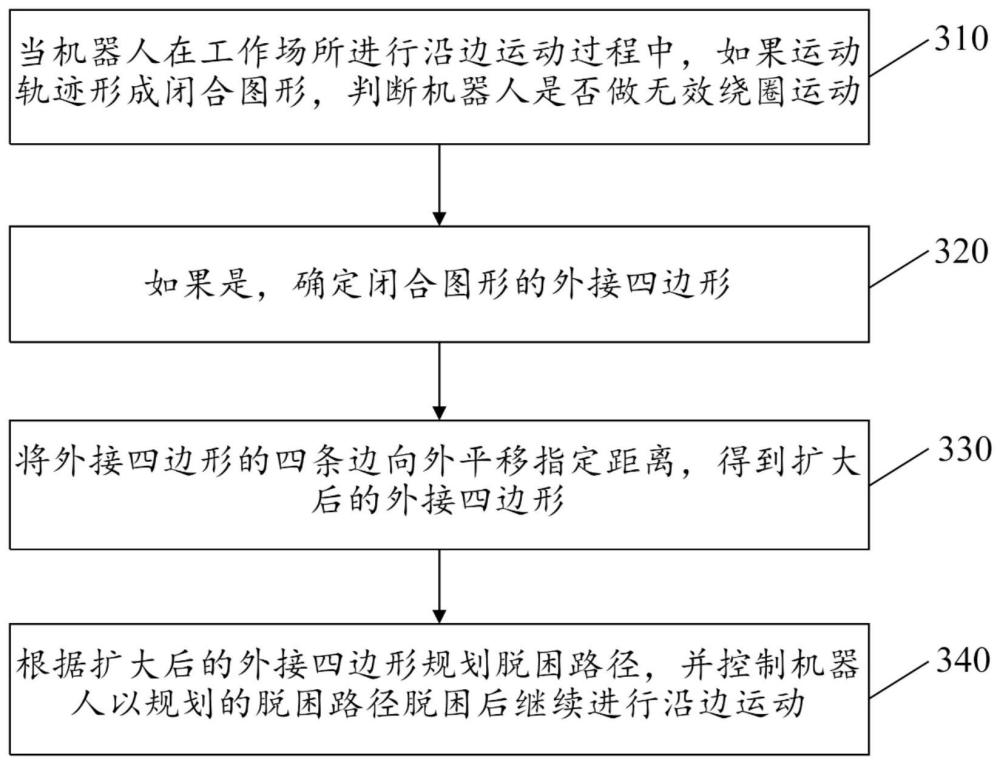
机器人脱困方法及机器人与流程
本申请涉及机器人,特别涉及一种机器人脱困方法及机器人。背景技术:1、移动机器人技术近年来得到了快速发展,广泛应用于物流仓储、智能巡检、智能家居、商场倒钩等诸多领域。其中,最常见的是家用扫地机器人。扫地......
-
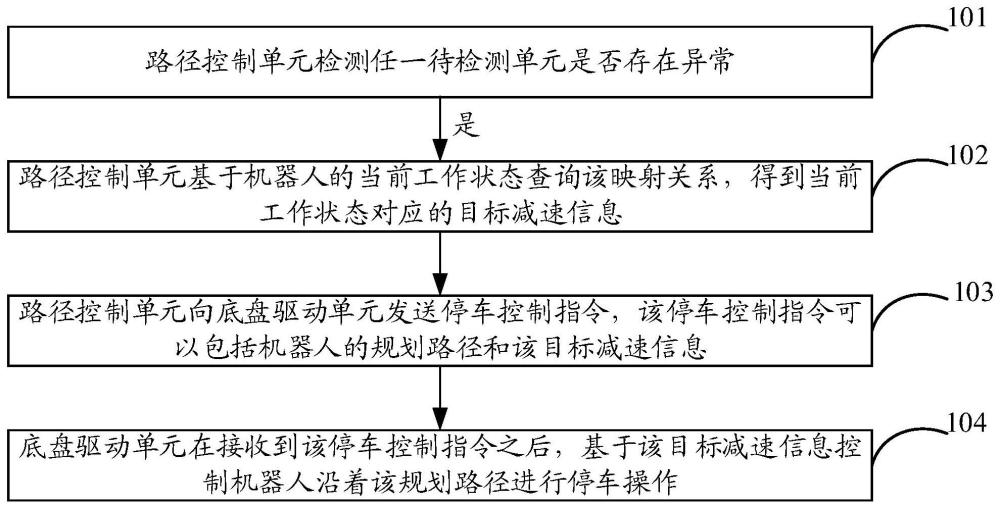
一种机器人的移动控制方法、装置及机器人与流程
本申请涉及机器人控制,尤其是涉及一种机器人的移动控制方法、装置及机器人。背景技术:1、近年来,各种类型的机器人,在技术和市场方面发展迅速,机器人是自动执行工作的机器装置,是依靠自身动力和控制能力来实现......
-
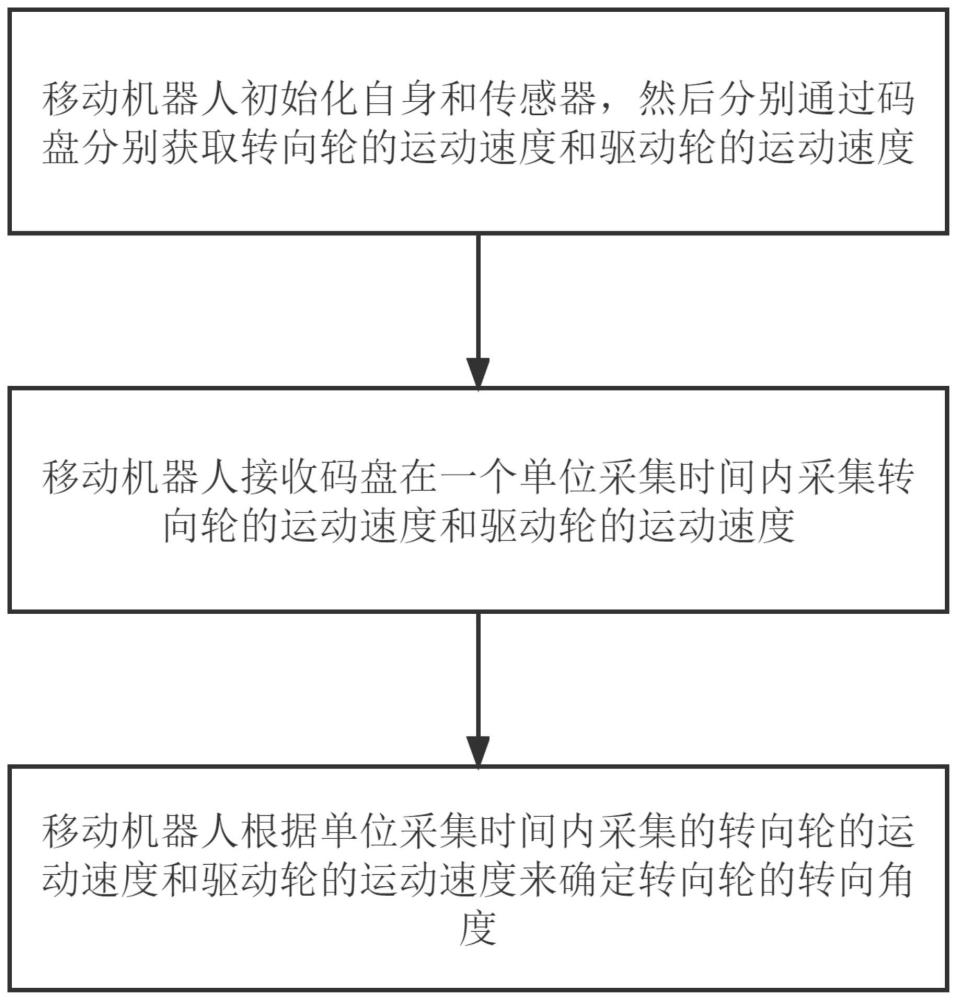
机器人转向轮的转向角度获取方法、芯片和机器人与流程
本发明涉及智能机器人,具体涉及一种机器人转向轮的转向角度获取方法、芯片和机器人。背景技术:1、现有的移动的机器人在获取机器人的移动轨迹时,通常是分别在移动机器人的两个驱动轮上设置码盘,然后根据两个码盘......
技术新讯 > 人与 > 列表
 2024-11-21
2024-11-21精选技术
-

用于T梁转运的装置及方法与流程
2024-08-02 -

电流互感器的性能评估方法及系统与流程
2024-09-14 -

小数据传输失败报告的制作方法
2024-10-15 -

一种河道工程用河道清淤搅动装置的制作方法
2024-07-09 -

调控叶轮组的制作方法
2024-07-30 -

一种数据丢失情况下无人水面航行器的航向控制方法
2024-08-01 -

吊架及空铁交通系统的制作方法
2024-08-01 -

一种高低压气瓶组合的氮气推进系统的制作方法
2024-08-01 -

一种船体上层建筑分段建造工艺的制作方法
2024-08-01 -
电磁加热蒸汽发生器的制作方法
2024-08-01